

5.13. Задание упругих связей
С помощью упругих связей может быть смоделировано соединение элементов, жесткость которого известна. Под упругой связью между узлами будем понимать пружину с заданной жесткостью по всем возможным перемещениям и поворотам, т. е. по всем шести степеням свободы.
Задание упругой
связи во многом аналогично созданию
стержневого элемента между двумя узлами.
Начинаем с того, что переходим в режим
«Новая упругая связь» нажатием кнопки
![]() на панели инструментов «Нарисовать»
(меню «Рисование»/«Упругая связь»).
Далее нужно щелкнуть сначала на первом
входящем в упругую связь узле, а затем
на втором. После этого откроется
диалоговое окно «Упругая связь» (рис.
5.37), в полях ввода которого задастся
жесткость упругой связи в локальной
системе координат связи. Кроме того,
слева от диалогового окна показывается
локальная система координат создаваемой
связи.
на панели инструментов «Нарисовать»
(меню «Рисование»/«Упругая связь»).
Далее нужно щелкнуть сначала на первом
входящем в упругую связь узле, а затем
на втором. После этого откроется
диалоговое окно «Упругая связь» (рис.
5.37), в полях ввода которого задастся
жесткость упругой связи в локальной
системе координат связи. Кроме того,
слева от диалогового окна показывается
локальная система координат создаваемой
связи.
Пусть требуется соединить два вала, представляющих собой отрезки стержня цилиндрического сечения, с помощью упругой муфты, жесткость которой как упругого элемента по перемещениям и поворотам известна. Левый вал левым концом жестко заделан (лишен всех перемещений и поворотов), а к правому концу правого вала приложена, например, вертикальная сила. Проанализируем, какие упругие связи должны быть заданы в этом случае, чтобы модель не стала геометрически изменяемой, т. е. механизмом.
Понятно, что в рассматриваемом примере для обеспечения корректности модели нужно в диалоговом окне «Упругая связь» (см. рис. 5.37) задать жесткость упругой связи по всем шести степеням свободы. Только в этом случае положение правого отрезка вала будет однозначно определено.
Казалось бы, достаточно задать жесткость упругой связи по смещению только в двух направлениях: вдоль оси Y (направления действия силы) и вокруг оси Z (направления действия изгибающего момента, возникающего вследствие наличия этой силы). Однако если не задана жесткость поворота вокруг оси X, то правый стержень имеет возможность вращаться вокруг своей оси, что означает превращение модели в механизм. Если пользователь все же попыта-

Рис. 5.37. Создание упругой связи между узлами модели
ется произвести расчет подобной модели, то получит сообщение о том, что расчет не может быть выполнен.
Замечание. Нулевое значение жесткости какой-либо степени свободы упругой связи означает возможность свободного перемещения элементов модели в соответствующем направлении. В примере, приведенном на рис. 5.38, это означало бы возможность свободного
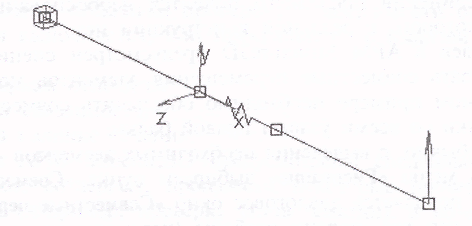
Рис. 5.38. Локальная система координат упругой связи
перемещения правого вала в направлении оси Z, а также вращения в осевом направлении (вокруг оси X) и вокруг оси Y. Для того чтобы исключить смещение и поворот правого вала, можно вместо задания упругих связей поставить в узлах этого вала опоры, исключающие смещения и повороты в тех направлениях локальной системы координат упругой связи, на которые НЕ ДЕЙСТВУЕТ приложенная сила.
5.14. Задание совместного перемещения элементов модели конструкции
Задачи такого типа возникают, если требуется обеспечить жесткое (или подвижное в каком-либо направлении) соединение узлов различных элементов модели конструкции. В качестве примера рассмотрим жесткое соединение да балочных элементов, один из которых представляет собой стержень определенного поперечного сечения, а другой смоделирован с помощью пластин (рис. 5.39).
Конечно, такое соединение можно создать и без использования каких-то специальных инструментов, а только с помощью набора уже известных нам функций. Однако тоща придется вводить специальные жесткие фиктивные стержни, соединяющие узел стержневой балки с каждым из лежащих в соеди-
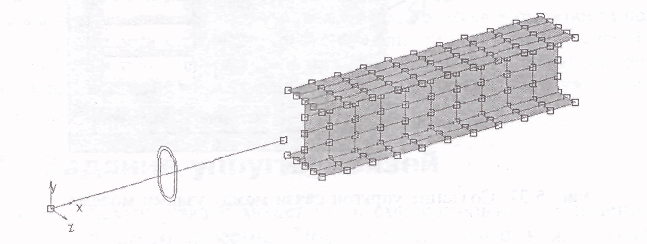
Рис. 5.39. Соединение двух разнородных стержневых элементов
няемом поперечном сечении узлов (или с основными узлами) балки, выполненной с использованием пластинчатых элементов. Ведь если обеспечить простое соединение узла стержневой балки с центральным узлом пластинчатой, то в месте присоединения последнего появится необоснованный концентратор напряжения, которого в реальной конструкции нет.
Для таких случаев в АРМ Structure3D предусмотрен специальный режим, позволяющий задавать совместные перемещения элементов модели.
В рассматриваемом примере необходимо обеспечить совместное перемещение узла левой балки со всеми узлами правой балки.
Начинаем, как обычно, с выделения необходимых элементов — в данном случае узлов. Далее в меню «Рисование» выбираем пункт «Совместные перемещения...»), после чего появляется диалоговое окно «Совместные перемещения» (рис. 5.40). Подчеркнем, что все степени свободы (перемещения и повороты), указанные в полях этого диалога, относятся к глобальной системе координат.
Для создания жесткого соединения необходимо обеспечить совместные перемещения выделенных узлов по всем степеням свободы, поэтому флажки должны быть поставлены напротив всех позиций (нужно нажать кнопку «Отметить Все»), Если необходимо разрешить какие-либо перемещения и повороты, то соответствующие степени свободы оставляем свободными.
Визуализация совместных перемещений группы узлов показана на рис. 5.41. Принцип построения отрисовки заключается в следующем: узел, имеющий наименьший номер, соединяется с остальными узлами. Если пользователь задаст совместное перемещение другой группы узлов в этой же модели, то оно будет отрисовано другим цветом.
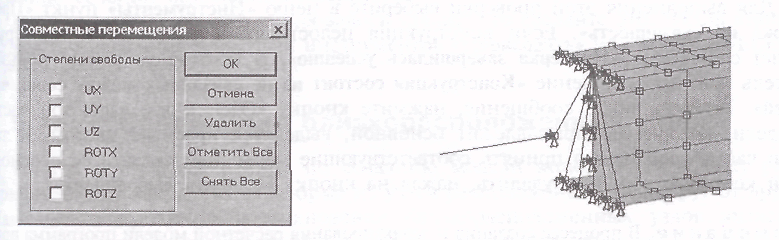
Рис. 5.40. Диалоговое окно Рис. 5.41. Визуализация совместных
«Совместные перемещения» перемещений группы узлов
Для редактирования совместного перемещения нужно после включения этого режима щелкнуть левой кнопкой мыши на одном из узлов, входящих в это перемещение. Будет открыто диалоговое окно (см. рис. 5.40) в котором можно изменить параметры совместного перемещения или удалить его.