

Министерство образования Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Институт - кибернетики
Направление – автоматизация Технологических процессов и производств
Кафедра – интегральных компьютерных систем управления
Проектирование систем управления двигателем постоянного тока
Курсовая работа по дисциплине
«АЭП НГО»
студентка гр. 8291 _____________ Е.А. Маликова
(подпись)
руководитель _____________ С.В. Леонов
(подпись)
Томск 2012г.
Министерство образования Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра_____________________
УТВЕРЖДАЮ:
Зав. кафедрой____________(И.О.Ф.)
(Подпись, дата)
ЗАДАНИЕ
на выполнение курсовой работы
Студентке гр. 8291 Маликовой Екатерине Александровне
1Тема курсовой работы _______________________________________________________
(утверждена приказом ректора (распоряжением декана) от____№___
2 Срок сдачи студентом готовой работы_____________________
3 Исходные данные к работе
Нагрузочная диаграмма.
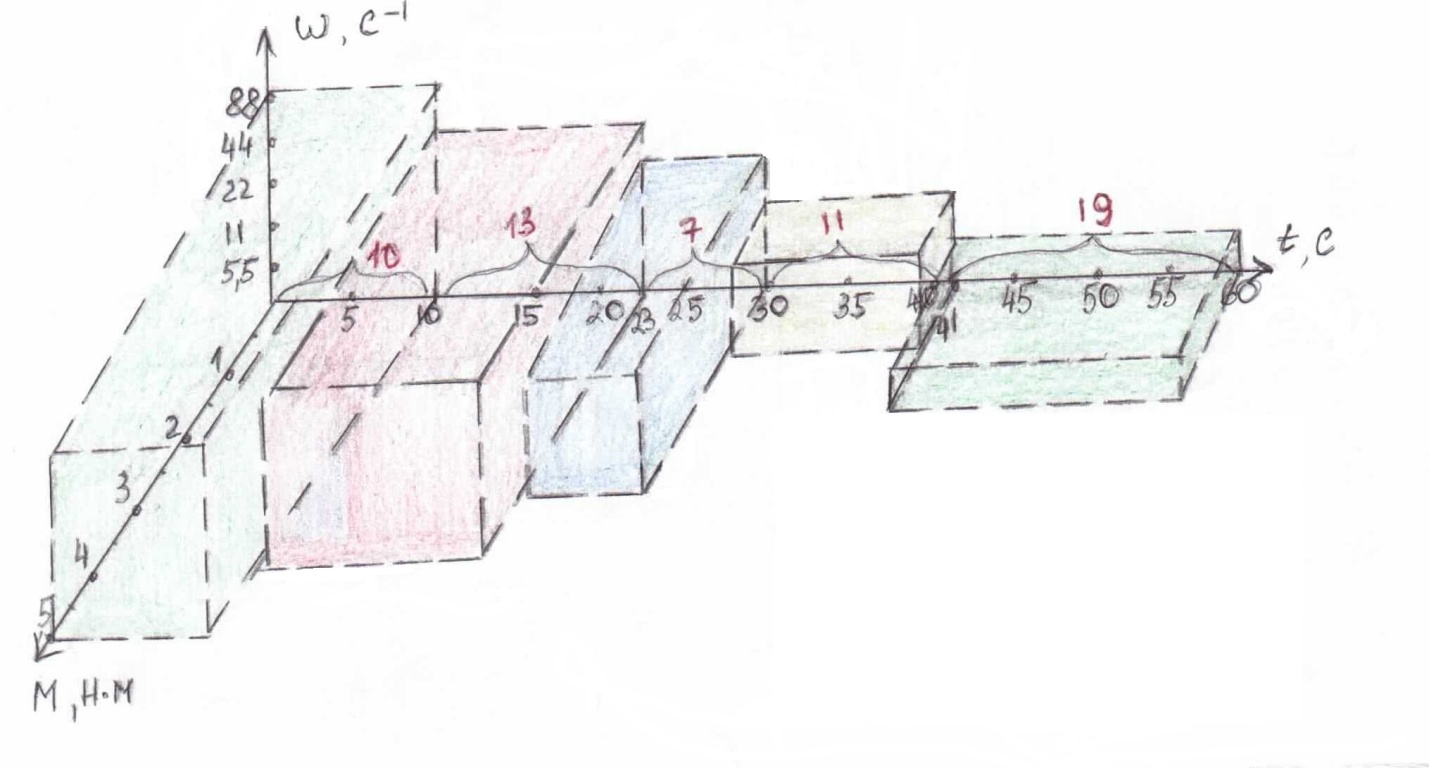
Исходные данные.
Момент:
М1=5Н*м
М2=4Н*м
М3=3Н*м
М4=1Н*м
М5=2Н*м
Время:
t1=10 сек.
t2=13 сек.
t3=7 сек.
t4=11 сек.
t5=19 сек.
Угловая скорость:
ω1=88 рад/с
ω2=44 рад/с
ω3=22рад/с
ω4=11 рад/с
ω5=5.5 рад/с
Температура:
tº=20ºC
Напряжение питания:
Uпит=220В
Время переходного процесса:
tпп=10% от интервала, т.е.
Ошибка регулирования в установившемся режиме на больше 5%
Руководитель________________ (И.О.Ф.)
(подпись, дата)
Задание принял к исполнению
____________________________ (И.О.Ф.)
(подпись, дата)
Содержание
Введение 6
Таким образом, выберем тахогенератор постоянного тока ТП-75-20-0,2, исходя из его характеристик 15
Таблица 4 15
Таким образом, выберем микроконтроллер STMicroelectronics, а именно STM32F по следующим причинам: имеет высокую производительность, прост в программировании. 16
Рис.5 Семейство 32-разрядных микроконтроллеров STM32F 17
2.1 Выбор функциональной схемы системы управления двигателем постоянного тока. 18
Введение
В данном курсовом проекте осуществляется подбор двигателя постоянного тока по определенным параметрам, заданным в варианте задания. Рассматриваются вопросы подбора схемы питания и выбора ее частей из линейки элементов, выпускаемых промышленностью; проектируется схема управления, в том числе: осуществляется выбор подходящего силового драйвера, МК, датчиков тока и скорости. По окончании расчетов системы электропривода будет произведено моделирование системы в пакете MatLab Simulink.
Двигатель постоянного тока.
Двигатель постоянного тока — электромеханический преобразователь энергии электрической в механическую, работающий от сети постоянного тока и имеющий в составе щёточно-коллекторный узел.
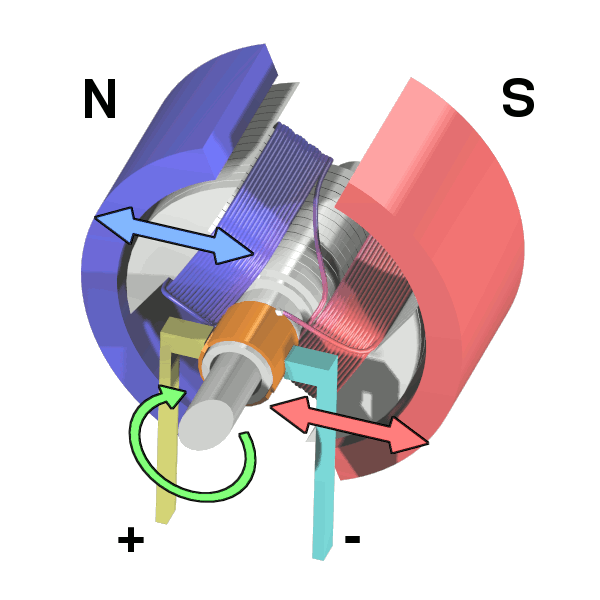
Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором.
Принцип действия основан на взаимодействии основного магнитного поля главных полюсов, с магнитным полем якоря вращающегося внутри. Поле якоря образуется (рамки с током) протекающим по обмотке постоянным электрическим током, который в каждый момент в зависимости от положения якоря протекает по одной из фаз.
Щеточно-коллекторный узел выполняет роль электромеханического преобразователя рода тока постоянного в переменный и коммутатора, подключая в текущий момент времени ту фазу обмотки якоря (катушку), который формирует максимальный электрический момент.