

1.3. Механические характеристики рабочих органов машины
Механической характеристикой (МХ) рабочих органов машины (РОМ) называют зависимость
![]() . (1)
. (1)
где
![]() – угловая скорость вращения РОМ;
– момент сопротивления РОМ.
– угловая скорость вращения РОМ;
– момент сопротивления РОМ.
МХ РОМ называют также зависимость
![]() . (2)
. (2)
При анализе приводов часто используются не физические (1) и (2), а приведенные механические характеристики РОМ. Они представляют собой зависимости вида
![]() , (3)
, (3)
![]() ). (4)
). (4)
где
– угловая скорость вращения двигателя,
![]() – приведенный момент сопротивления
РОМ.
– приведенный момент сопротивления
РОМ.
Существует следующая классификация моментов сопротивления. Различают активные и реактивные моменты сопротивления.
Активными называют моменты сопротивления, обусловленные внешними источниками энергии. Характерной особенностью активного момента является его независимость от знака скорости ω. Классический пример активного момента – момент, создаваемый при подъеме или опускании груза (рисунок 1).
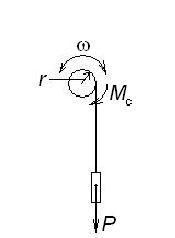
Рисунок 1-Схема подъема/опускания груза, создающего активный момент сопротивления
На груз, подвешенный к блоку радиуса r, действует сила тяжести P. Блок может вращаться по или против часовой стрелки с угловой скоростью . Момент сопротивления , создаваемый при этом, будет равен произведению модуля силы тяжести на радиус блока, т.е.
![]() . (5)
. (5)
Как видно из соотношения (5), момент сопротивления не зависит от скорости ω вращения блока. Механическая характеристика РОМ с активным моментом изображена на рисунке 2. Как видно, она параллельна оси ординат.

Рисунок 2-МХ РОМ с активным моментом
Реактивным называют момент, представляющий собой реакцию на электромагнитный момент двигателя. Характерной особенностью реактивного момента является его зависимость от знака скорости. Также реактивный момент зависит и от других факторов. По этому признаку выделяют следующие типы реактивного момента:
момент сухого трения,
момент вязкого трения,
вентиляторный момент.
Приведем на рисунке 3 график МХ РОМ с идеальным моментом сухого трения. Момент сухого трения при положительных значениях скорости ω имеет положительные значения и не меняется, а при отрицательных скоростях – отрицательные и также не меняется. В общем случае амплитуда положительного и отрицательного моментов сухого трения различна. Однако для момента сухого трения, приведенного на рисунке 3, она принимается для простоты одинаковой.
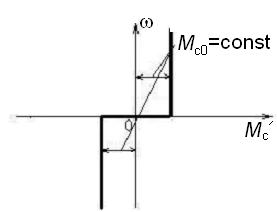
Рисунок 3-МХ РОМ с идеальным моментом сухого трения
МХ РОМ с идеальным
моментом сухого трения можно представить
также и в обратном виде, т.е. в виде
зависимости момента сопротивления
![]() от угловой скорости ω (рисунок 4).
от угловой скорости ω (рисунок 4).
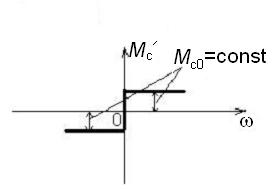
Рисунок 4-МХ РОМ с идеальным моментом сухого трения
Аналитически такая МХ представима в виде
![]() ). (6)
). (6)
При вязком трении знак момента сопротивления также зависит от знака угловой скорости, но с изменением скорости линейно изменяется. График указанной МХ представлен на рисунке 5.

Рисунок 5-МХ РОМ с моментом вязкого трения
Уравнение МХ в этом случае записывается в виде
![]() , (7)
, (7)
где![]() – коэффициент
вязкого трения.
– коэффициент
вязкого трения.
Следующим типом момента сопротивления РОМ является вентиляторный момент. Нагрузкой привода в данном случае является вентилятор, перемещающий жидкую либо газообразную среду.
Качественно он напоминает вязкое трение. Характерной особенностью данного типа момента является то, что при увеличении угловой скорости момент возрастает достаточно резко – быстрее, чем возрастает скорость. Качественно график МХ вентиляторного момента представлен на рисунке 6.

Рисунок 6-МХ РОМ с вентиляторным моментом
Уравнение МХ РОМ с вентиляторным моментом записывается следующим образом:
![]() ), (8)
), (8)
где
![]() – коэффициент;
– коэффициент;
![]() =
1.5...3 – коэффициент.
=
1.5...3 – коэффициент.
Таковы основные моменты сопротивления РОМ, рассматриваемые в теории электропривода.