

Федеральное агентство по образованию
Высшего профессионального образования
Государственное образовательное учреждение
Ульяновский Государственный Технический университет
Кафедра «Электропривод»
Реферат
Тема: «Вентильно-индукторный электропривод»
Выполнил
Студент группы Эд – 41
Бубнов А.Д.
Проверил преподаватель
Петрова М.В.
Ульяновск 2012
Содержание
Y
Введение 3
1.Определение и структурная схема вентильно–индукторного электропривода 5
2.Принцип действия ВИП 10
3.Области применение ВИП 15
4.Преимущества 21
5.Недостатки 24
Заключение 27
Список литературы 30
Введение
Электрические приводы потребляют более половины всей производимой в мире электроэнергии и постоянно расширяют сферу своего применения. Все известные типы электрических машин, составляющих основу электроприводов, были изобретены еще в XIX веке, но к середине XX века широкое распространение получили только те, которые могли подключаться непосредственно к питающей сети. Это традиционные коллекторные двигатели постоянного тока, асинхронные и синхронные двигатели. Достижения в силовой и управляющей электронике привели к созданию в конце XX века надежных статических электрических преобразователей, обеспечивающих возможность плавного регулирования выходных координат электропривода и получения требуемого по технологии режима движения
Сегодня в мире ежегодно выпускается порядка семи миллиардов электродвигателей. Электродвигатели потребляют около 70% общего количества произведенной электроэнергии и, соответственно, являются основными потребителями электроэнергии. Поэтому в настоящее время достаточно остро стоит задача оптимального управления электродвигателями не только с технологической точки зрения, но и с точки зрения экономии электроэнергии.
Особый интерес в промышленно развитых странах на сегодняшний день вызывает перспективный тип электропривода на основе вентильного индукторного двигателя, известного в иностранной литературе как Switched Reluctance Motor. Ведущими электротехническими компаниями за последние два с половиной десятилетия освоен выпуск вентильных индукторных двигателей (от единиц ватт до сотен киловатт) для различных областей. К настоящему времени решены первоочередные задачи: обоснован функциональный состав привода и сформулированы требования к его элементам; проанализированы физические особенности функционирования вентильного индукторного двигателя при представлении его различными математическими моделями; намечены и частично реализованы подходы к формированию алгоритмов управления.
Одним из наиболее важных звеньев в технологическом процессе на ряде производств, в том числе и в металлургии являются цеха водоснабжения, содержащие большое количество насосных установок, электропривод которых построен на основе широко распространенного асинхронного электродвигателя с короткозамкнутым ротором. Проведенные исследования показывают, что в настоящее время наиболее конкурентоспособным по технологичности, ремонтопригодности и энергетическим характеристикам является электропривод, выполненный на основе вентильного индукторного электродвигателя.
1.Определение и структурная схема вентильно–индукторного электропривода
В ентильно-индукторный
электропривод - это электропривод,
содержащий индукторную машину с
неодинаковым числом явно выраженных
полюсов на статоре и роторе и электронный
коммутатор, управляемый в функции
положения ротора. Под вентильным режимом
работы этого электропривода подразумевается
синхронная с изменением положения
ротора коммутация тока в фазах
электрической машины. Для этого обычно
используется связанный с валом двигателя
датчик положения, в качестве которого
применяются датчики Холла, оптические
датчики вместе с щелевым диском или
кодовыми шкалами, сельсины, револьверы
и др.
ентильно-индукторный
электропривод - это электропривод,
содержащий индукторную машину с
неодинаковым числом явно выраженных
полюсов на статоре и роторе и электронный
коммутатор, управляемый в функции
положения ротора. Под вентильным режимом
работы этого электропривода подразумевается
синхронная с изменением положения
ротора коммутация тока в фазах
электрической машины. Для этого обычно
используется связанный с валом двигателя
датчик положения, в качестве которого
применяются датчики Холла, оптические
датчики вместе с щелевым диском или
кодовыми шкалами, сельсины, револьверы
и др.
Рис. 1. Вентильно-индукторный электропривод
Вентильно-индукторный
электропривод (рис. 1) состоит из собственно
двигателя — вентильно-индукторной
машины (ВИМ), электронного коммутатора
К, подключенного к выпрямителю В
параллельно с конденсатором С, и
управляемого обычно датчиком положения
ротора Д через схему управления СУ. ВИМ
имеет явно полюсный статор, например с
n = 6 полюсами, несущий сосредоточенные
обмотки (катушки), и явнополюсный
пассивный ротор, число полюсов которого
отличается от числа полюсов статора,
например m = 4. Катушки связаны с электронным
коммутатором, на каждую из n/2 фаз которого
приходятся в рассматриваемом примере
два ключа — транзистора — и два диода
(на рис. 1 показана только одна фаза АХ).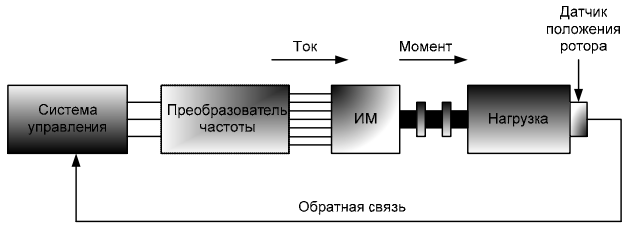
Рис.2. Структурная схема ВИП.
В ее состав входят индукторная машина (ИМ), преобразователь частоты, система управления и датчик положения ротора (ДПР). Функциональное назначение этих элементов ВИП очевидно: преобразователь частоты обеспечивает питание фаз ИМ однополярными импульсами напряжения прямоугольной формы; ИМ осуществляет электромеханическое преобразование энергии, а система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом.
По своей структуре ВИП ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако в отличие от регулируемого электропривода, например с асинхронным двигателем, ИМ в ВИП не является самодостаточной. Это означает, что она принципиально не способна работать без преобразователя частоты и системы управления.
Преобразователь частоты и система управления являются неотъемлемыми частями ИМ, необходимыми для осуществления электромеханического преобразования энергии.
Это дает право утверждать, что совокупность структурных элементов, представленных на рис.2, является не только системой регулируемого электропривода, но и электромеханическим преобразователем энергии.
Особенности конструкции индукторной машины.
ИМ, входящая в состав ВИД, может иметь различные конструктивные исполнения. На рис.1 для примера, приведено поперечное сечение 4х–фазной ИМ конфигурации 8/6. При обозначении конфигурации ИМ первая цифра указывает число полюсов статора, вторая – ротора.

Рис. 2.1. Поперечное сечение 4х–фазной ИМ конфигурации 8/6.
Анализ рис. 2.1. показывает, что ИМ имеет следующие конструктивные особенности.
1. Сердечники статора и ротора имеют явнополюсную структуру.
2. Число полюсов относительно невелико. При этом число полюсов статора больше числа полюсов ротора.
3. Сердечники статора и ротора выполняются шихтованными.
4. Обмотка статора – сосредоточенная катушечная. Она может быть одно- или многофазной.
5. Фаза ИМ, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора. Известны ИМ с удвоенным числом полюсов статора и ротора. В 4х–фазном исполнении они имеют конфигурацию 16/12. Фаза такой ИМ состоит из двух пар катушек, которые располагаются на полюсах статора таким образом, что их оси ортогональны.
6. Катушки фазы могут быть соединены в электрическом отношении параллельно или последовательно; в магнитном – согласно или встречно.
7. Обмотка на роторе ИМ отсутствует.