

Содержание.
1. Введение 3
2. Кинематический расчет силового привода ленточного транспортера 4
3. Расчет закрытой червячной передачи 8
4. Расчёт открытой передачи 13
5. Предварительный расчет и конструирование валов 15
6. Расчет шпоночного соединения 18
7. Смазывание редуктора 19
8. Порядок сборки и разборки редуктора 20
9. Список используемых источников 21
Введение
Технический уровень всех отраслей народного хозяйства в значительной мере определяется уровнем развития машиностроения. На основе развития машиностроения осуществляется комплексная механизация и автоматизация производственных процессов в промышленности, строительстве, сельском хозяйстве, на транспорте.
Государством перед машиностроением поставлена задача значительного повышения эксплуатационных и качественных показателей при непрерывном росте объема ее выпуска.
Одним из направлений решения этой задачи является совершенствование конструкторской подготовки студентов высших учебных заведений.
Объектом данного курсового проекта является привод ленточного транспортера.
Привод состоит из:
- электродвигателя;
- открытой клиноременной передачи;
- Редуктор червячный одноступенчатый с нижним расположением червяка;
- муфт;
- рабочего вала.
1 Кинематический расчет силового привода
1.1 Изучение кинематической схемы и нумерация валов.
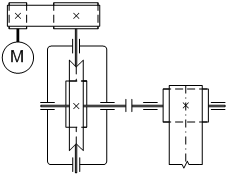
Дано: D = 0.4 м; F = 3 Кн; V = 1м/с.
Рисунок 1 – кинематическая схема.
Производим нумерацию валов:
1 – вал электродвигателя;
2 – быстроходный вал редуктора;
3 – тихоходный вал редуктора;
4 – рабочий вал ленточного транспортера.
Выбор электродвигателя.
Требуемая мощность электродвигателя:
1.2 Выбор электродвигателя
![]() кВт
кВт
где
![]() –
мощность на валу рабочего органа привода:
–
мощность на валу рабочего органа привода:
![]() кВт
кВт
![]()
![]()
![]() =
0,7
=
0,7
![]() = 0,95
= 0,95
![]() = 1
= 1
Требуемая
частота вращения
![]() вала электродвигателя, об/мин:
вала электродвигателя, об/мин:
![]() об/мин
об/мин
где
![]() – угловая скорость рабочего вала ,
рад/с:
– угловая скорость рабочего вала ,
рад/с:
![]() рад/с.
рад/с.
Возможное среднее рекомендуемое передаточное число привода:
![]()
![]() =
25,
=
25,
![]() =2,5;
=2,5;
В
соответствии с требуемой мощностью
электродвигателя –
![]() (ближайшая, большая мощность) и требуемой
частотой вращения вала –
(ближайшая, большая мощность) и требуемой
частотой вращения вала –![]() электродвигателя
(ближайшая величина) выбираем
электродвигатель АИР100L2.
Параметры выбранного электродвигателя
заносим в таблицу.
электродвигателя
(ближайшая величина) выбираем
электродвигатель АИР100L2.
Параметры выбранного электродвигателя
заносим в таблицу.
Таблица 1.Технические характеристики электродвигателя.
Тип двигателя |
Исполнение |
Мощность, кВт |
Число полюсов |
Частота вращения, об/мин |
|
Диаметр вала, мм |
АИР100L2 |
1М1081 |
5,5 |
2 |
2850 |
2,2 |
28 |
1.3
Определение общего передаточного числа
![]() привода и разбивка его между отдельными
ступенями
привода и разбивка его между отдельными
ступенями
![]()
Угловая скорость вала электродвигателя, рад/с:
![]() рад/сек
рад/сек
![]() .
.
![]()
По
таблице № 5 принимаем
![]() =25
=25
![]()
![]()
1.4 Определение угловых скоростей валов привода
![]() =
=
![]() рад/с.
рад/с.
![]() =
=
![]() рад/с
рад/с
![]() рад/с
рад/с
![]() рад/с
рад/с
![]() рад/с
рад/с
1.5 Определение частот вращения валов
![]() ,об/мин
,об/мин
![]() ,об/мин
,об/мин
![]() ,об/мин
,об/мин
1.6 Определение мощностей на валах привода
![]() кВт
кВт
![]() кВт
кВт
![]() кВт
кВт
![]()
1.7 Определение вращающих моментов на валах привода
![]() кН
кН![]() м
м
![]() кН
м
кН
м
![]() кН
м
кН
м
![]() кН
м
кН
м
Таблица 2. Результаты кинематического расчета
Валы привода |
Величины |
Передаточные числа |
|||
, рад/с |
n , об/мин |
Р, кВт |
Т, кНм |
|
|
1 |
298.3 |
2850 |
4,651 |
0,0156 |
|
2 |
125 |
1194.27 |
4,60449 |
0,0368 |
|
3 |
5 |
47.77 |
4,33 |
0.866 |
|
4 |
5 |
47.77 |
3 |
0.6 |
|
2 Расчет закрытой червячной передачи
Т1=36800Н·мм Т2=866000 Н·мм
![]()
![]()
![]()
![]()
Передаточное число:
![]()
2.1 Выбор материала червячной пары. Назначение упрочняющей обработки и определение допускаемых напряжений
Скорость скольжения:
![]() м/с
м/с
По таблице А 10 приложения принимаем материал для венца червячного колеса.
принимаем безоловянную бронзу БрАж–9-4л, отливка в землю , Сталь HRC 45 и >
Допускаемое контактное напряжение:
![]() Н/мм2
Н/мм2
По таблице А 11 определяем значение допускаемых напряжений:
![]()
2.2 Определение размеров и параметров червячного зацепления
2.2.1 Число заходов червяка и число зубьев колеса
Принимаем
![]() ,при
U=25
,при
U=25
Число зубьев червячного колеса составит:
![]()
1)
коэффициент нагрузки принимаем:![]()
2) коэффициент диаметра червяка определяем по формуле:
![]()
.