

2.1. Определение приведённых факторов
Выбираем схему динамической модели с распределёнными факторами.
В качестве звена приведения выбираем кривошип (рис. 6):
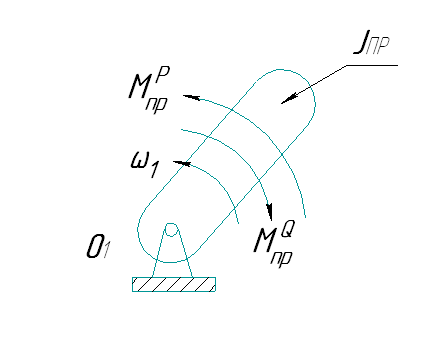
где ω1 – угловая скорость звена приведения;
Jпр – приведённый момент инерции кривошипа;
 ,
,
 - приведённые моменты движущих сил и
сил сопротивления.
- приведённые моменты движущих сил и
сил сопротивления.
Рис. 6 Динамическая модель
Используя результаты кинематического анализа, рассчитываем Jпр и
для исследуемого положения механизма. Учитывая, что VS3 =0, G4 =0, JS4 =0,
записываем выражение для Jпр :


Выражение для запишется в виде:

Учитывая, что VS3 =0, VS5 =VC5 =V5 , G4 =0, получим:

2.2. Построение диаграмм
1. По результатам
компьютерного расчета для 12-ти положений
строим график изменения приведенного
момента сил сопротивления в зависимости
от угла поворота кривошипа
= f(φ) (см лист 2). Масштабные коэффициенты
 и
и
 задаем согласно рекомендациям по
выполнению курсового проекта:
задаем согласно рекомендациям по
выполнению курсового проекта:


2. Методом графического интегрирования графика = f(φ) получаем график
работы приведенных
сил сопротивления
 = f(φ) . Базу интегрирования НF
= f(φ) . Базу интегрирования НF
принимаем равной 70 мм.
Масштабный коэффициент работы (кинетической энергии) рассчитываем
по формуле:
 =
=
 = Н ·
·
= Н ·
·
 = 70·
0,035·
6 = 14,7
Dж/мм;
= 70·
0,035·
6 = 14,7
Dж/мм;
3. График работ
движущих сил
 = f(φ) строится из условия равенства
нулю
= f(φ) строится из условия равенства
нулю
изменения кинетической энергии за полный цикл периодически установившегося
режима работы
механизма: Δ =
=
 +
+
 = 0, а также принятого допущения:
= 0, а также принятого допущения:
 = const.
Из формулы следует, что
= –
;
= const.
Из формулы следует, что
= –
;
Строим графики работ движущих сил в отрицательной и положительной
области.
4. График
изменения кинетической энергии Δ = f(φ) внутри цикла строится
= f(φ) внутри цикла строится
как алгебраическая
сумма работ сил движущих
 и сил сопротивления
и сил сопротивления
 для
для
каждого положения
механизма: Δ =
+
=
+
5. По результатам компьютерного расчета для 12-ти положений механизма
строим график изменения приведенного момента инерции в зависимости от угла
поворота кривошипа Jпр= f(φ); задаем масштабный коэффициент приведенного
момента инерции
 :
:

Для удобства дальнейших построений ось углов на графике располагаем
вертикально, а ось приведенных моментов инерции располагаем горизонтально.
6. Диаграмму
энергомасс Δ
= f( ) строим методом графического исключения
параметра φ из графиков Δ
= f(φ) и
= f(φ);
) строим методом графического исключения
параметра φ из графиков Δ
= f(φ) и
= f(φ);
2.3. Определение момента инерции маховика и его размеров
Используя диаграмму энергомасс, определяем момент инерции маховика.
1. По формулам
рассчитываем углы
 и
и
 :
:






2. Под найденными углами проводим касательные к диаграмме энергомасс
(соответственно сверху и снизу);
3. Замеряем в мм отрезок ab, который касательные отсекают на вертикаль-
ной оси диаграммы;
4. Рассчитываем
требуемую величину момента инерции
маховика
 сни-
сни-
жающего колебания угловой скорости до заданного уровня:

5. Рассчитываем геометрические размеры маховика:

h
= 0,2
 = 0,2 · 1,17=0,234
= 0,2 · 1,17=0,234
 ;
;
b = 0.1 = 0,1 · 1,17=0,117 ;
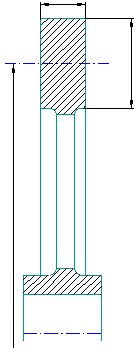
Рис. 7 Эскиз маховика