

Скорости точек механизма
-

м/с

м/с

м/с

м/с

м/с

м/с

м/с

м/с

м/с
ω1
1/с
ω2
1/с
ω3
1/с
ω4
1/с
5,57
6,3
3,92
3,99
0
5,25
0
5,6
0,63
-14,65
3,52
5,63
5,63
Знак «–» означает, что угловая скорость звена направлена по ходу часовой
стрелки
1.5.2. Построение плана ускорений
А) механизм I класса (звено 1вместе со стойкой).
Точка А кривошипа О1А совершает вращательное движение вокруг точки О1, поэтому её ускорение есть сумма нормального и касательного ускорений:

Поскольку принято n1=сonst (следовательно, ε1 = 0), то
Модуль ускорения
 м/с2
м/с2
На плане ускорений этот вектор изображается отрезком 136 мм, направленным от точки А к О1. Масштаб плана ускорений:
 м/с2∙мм
м/с2∙мм
Б) группа Ассура II1 (2,3)
Составляется система векторных уравнений, связывающих ускорение внутренней точки В с ускорениями внешних точек А и О3 :

В этой системе модули нормальных ускорений определяются по формулам:
anBA = ω22 ∙LAB = (3,52)2 ∙1,59 = 19,7 м/с2
anBO3 = ω32 ∙LBO3 = (5,63)2 ∙1,12 = 35,5 м/с2
Чтобы эти ускорения изобразить на плане ускорений, разделим полученные значения на масштаб плана ускорений и получим длины отрезков в мм:
Согласно векторным уравнениям строим план ускорений: из полюса плана (точка π) проводим отрезок πа длиной 136 мм, направлен-
ный к центру вращения кривошипа, параллельно направлению кривошипа в
9-м положении. Из точки а проводим отрезок an2 в направлении, параллельном звену АВ механизма. Из полюса π (с ним совпадают все неподвижные
точки механизма: О1, S1, О3, S3) откладываем отрезок πn3 , параллельный
звену ВD; через конец вектора an2 проводим отрезок произвольной длины,
перпендикулярный
звену АВ,
а через конец вектора πn3
проводим отрезок произвольной длины,
перпендикулярный звену ВD.
Точка пересечения перпендику-ляров АВ
и ВD
есть точка b
(смотри лист 1). Отрезок n2b
на
плане соответствует касательному
ускорению
 ,
а
отрезок
n3b
на
плане соответствует
,
а
отрезок
n3b
на
плане соответствует
касательному
ускорению

Чтобы определить величину ускорения точки по плану ускорений, нужно
соответствующий отрезок на плане измерить в мм и умножить эту величи-
ну на масштабный коэффициент ускорений:
 B
= (πb)
∙ Kа
= 85 ∙0,6 = 51 м/с2
B
= (πb)
∙ Kа
= 85 ∙0,6 = 51 м/с2
= (n2b) ∙ Kа = 142 ∙0,6 = 85,2 м/с2
= (n3b) ∙ Kа = 60 ∙0,6 = 36 м/с2
Ускорения точек S2 и С3 определяем с помощью теоремы подобия, на основании которой составляем пропорцию, связывающую чертёжные (или истинные) размеры звена 2 (АВ, АS2) с отрезками плана ускорений:

Из уравнения определяем длину неизвестного отрезка:

Отрезок аs2 откладываем от точки а на плане ускорений по линии ab. Точка s2 является концом вектора S2, начало всех векторов – в полюсе π. Поэтому отрезок πs2 на плане ускорений изображает вектор S2 :
S2 = (πs2) ∙ Kа = 100 ∙0,6 = 60 м/с2
Ускорение точки С3 определяем аналогично по принадлежности звену 3:

Из формулы определяем длину неизвестного отрезка:

Этот отрезок откладываем от полюса π на плане ускорений в сторону, противоположную отрезку πb (см план ускорений на листе 1).
Модуль вектора ускорения С3 определяем по формуле:
С3 = (πc3) ∙Kа =53 ∙ 0,6= 31,8 м/с2
Определяем величины угловых ускорений звеньев 2 и 3:
Для определения направления ε2 отрезок n2b на плане ускорений устанавливается в точку В, а точка А закрепляется неподвижно. Тогда становится очевидным, что ε2 направлено по часовой стрелке. Для определения направления ε3 отрезок n3b устанавливается в точку В, точка О3 неподвижна. Следовательно, ε3 направлено против часовой стрелки (см рис. 5)
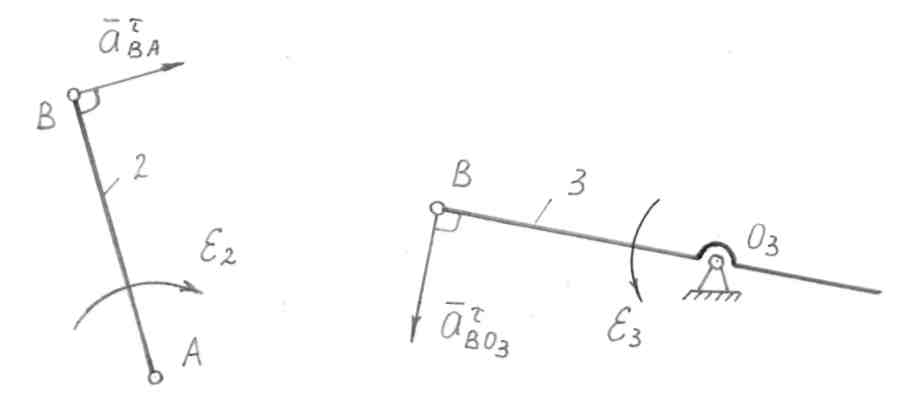
Рис. 5 Определение направлений угловых ускорений звеньев
В) Группа Ассура II4 (4,5)
Так как группа Ассура, состоящая из звеньев 4 и 5 относится к 4-му виду
(в состав группы входят две внешние поступательные и одна внутренняя
вращательная кинематическая пара, см рис. 3), то векторные уравнения для
определения ускорения 5-го звена запишутся в виде:
аС4(5) = аC3 + акор + аC4С3
аС5 = аNN + аC5,NN
где аС4(5) – ускорение шарнира С, который соединяет 4-е и 5-е звенья;
аC3 – ускорение полюса С3, лежащего на кулисе BD;
акор – ускорение Кориолиса, вектор акор направлен перпендикулярно кулисе BD;
аC4С3 – ускорение точки С, принадлежащей ползуну 4, в ее поступательном
движении относительно точки С3 на кулисе; вектор аС4(5) направлен
параллельно кулисе BD;
аС5 – ускорение точки С, принадлежащей 5-му звену;
аNN – ускорение неподвижных направляющих, по которым перемещается
5-е звено (аNN =0);
аC5,NN – ускорение точки С, принадлежащей 5-му звену, которое определено в
поступательном движении относительно неподвижных направляющих NN;
вектор аC5,NN направлен параллельно направляющим NN;
Ускорение Кориолиса вычислим по формуле:
 м/с2
м/с2
Разделив найденное значение акор на масштабный коэффициент ускорений, получим длину отрезка в мм, которым вектор ускорения Кориолиса изобразится на плане ускорений:
Откладываем на плане ускорений данный отрезок от точки С3 в направлении, перпендикулярном кулисе BD, согласно правилу Жуковского; через точку К проводим отрезок произвольной длины, параллельный кулисе BD; через точку π
(полюс плана) проводим отрезок произвольной длины, параллельный направляющим NN; точка пересечения этих отрезков есть точка С5 (см план ускорений на листе 1).
Модули векторов ускорений С5 и аC4С3 определяем по формулам:
С5 = (πc5) ∙Kа = 25∙0,6 = 15 м/с2
аC4С3 =(кc5) ∙ Kа = 33∙0,6 = 19,8 м/с2
Так как ползун 4 поворачивается вместе с кулисой BD, его угловое ускорение
по величине и по направлению равно угловому ускорению кулисы BD:
𝛆4 = 𝛆3
Величины ускорений, определенные по плану, занесем в таблицу.
Таблица 1.4