

Основні поняття мікропроцесорних систем
Універсальними пристроями обробки сигналів стосовно МП є цифрові системи, вхідні і вихідні сигнали яких мають дискретний вигляд.
“ 1”
– рівень сигналу, що наближується до
напруги джерела живлення.
1”
– рівень сигналу, що наближується до
напруги джерела живлення.
“0” – рівень сигналу, що наближується до потенціалу заземлюючого проводу.
Розглянемо задачу спрацювання дзвоника будільника.
Діаграма стану цифрової системи –
наз. напрямлений граф, дуги якого відповідають допустимій сукупності станів запам’ятовуючих елементів схеми, не обов’язково явно присутніх;
наз. напрямлений граф, дуги якого відповідають умовам зміни функціонального стану системи, а вершини відповідають стійким функціональним станам.


Реалізація діаграми стану в программі визначеної системи пов’язана з обчисленням чергового стану на базі попереднього стану та вхідної дії.

A2 |
A1 |
A0 |
D1 |
D0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |

Процес розподілення стану на підстани наз. декомпозицією діаграми стану.
Зворотній зв’язок виключає деякі стани(тобто блокує кнопку).
Декомпозиція стану зазвичай супроводжується збільшенням кількості адресних станів. Вона дозволяє збільшувати функціональні можливості пристроїв без модифікації схемних рішень
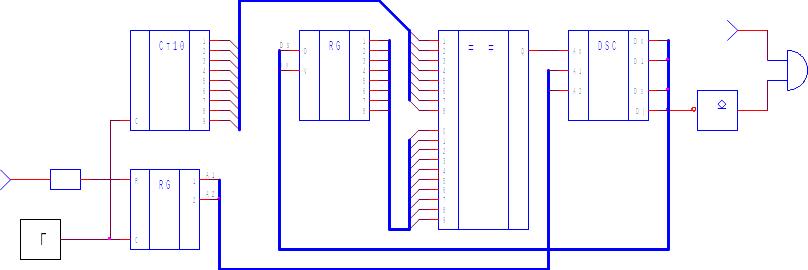
Формування адреси ПЗП
Виконання логічних операцій (схема порівняння)
Зберігання та модифікація даних (регістри)
Керування наступною адресою в залежності від результатів обчислення
Опитування датчиків, тобто ввод значень, що сформовані користувачем
Формування керуючих сигналів, тобто вивод значень сигналів керування зовнішнім обладнанням
Для універсалізації перелічені функції повинні бути підсилені в порівнянні з типовими додатками.
Мікропрограмний принцип керування операціями
1) Узагальнена структура мікропрограмних пристроїв
2) Способи відображення мікропрограм
3) Способи керування операціями
Мікропрограма – метод проектування та реалізації функції керування системою обробки даних, що спирається на послідовність сигналів керування, які використовують для інтерпретації фіксованих або динамічно-змінюємих операцій обробки даних.
Сигнали керування, які представлені у вигляді слов (8 розрядів – байт) і зберігаються в ПЗП або ОЗП системи керування відображають стан сигналів, що керують потоком інформації між виконавчими функціональними вузлами і визначають впорядкований перехід від одного стану до іншого.

Мікрооперація – це елементарний неподільний акт обробки інформації в операційному вузлі (ОВ), що проходить на протязі одного такту.
Сигнали керування в вузлі керування (ВК) формуються за допомогою тактових імпульсів. На протязі тактового імпульса може бути виконана сукупніст мікрооперацій одночасно. Ця сукупність наз. мікрокомандою.
Набор мікрокоманд утворюють мікропрограму, яка реалізує алгоритм функціонування системи.
Цикл – це час за який виконується команда.