

1.3. Структура и основные функции увм
Управляющие устройства могут быть построены на дискретных элементах или выполнены в виде УВМ. Будем считать, что управляющее устройство выполнено на дискретных элементах, если в нем функции управления реализуются без применения процессоров. И напротив, если основные логические и арифметические операции, необходимые для осуществления процесса управления, реализуются с помощью микропроцессорных конструкций, то такое управляющее устройство является УВМ.
Современная управляющая вычислительная машина — это управляющее устройство, построенное на базе микроЭВМ и их комплексов.
Управляющие устройства на дискретных элементах, такие как магнитные пускатели и аналоговые системы управления электроприводами, применяются в АСУТП на нижних уровнях управления, а на верхних уровнях управления применяются исключительно УВМ (см. рис. l.l). Тем не менее многие функции УВМ, связанные с вводом, выводом, отображением и преобразованием информации, реализуются на дискретных элементах, не входящих в микропроцессорные комплекты, таких как клавиатура, дисплей, магнитные запоминающие диски и дискеты, аналого-цифровые и цифроаналоговые преобразователи и др.
Структура УВМ в составе АСУТП представлена на рис. 1.2.
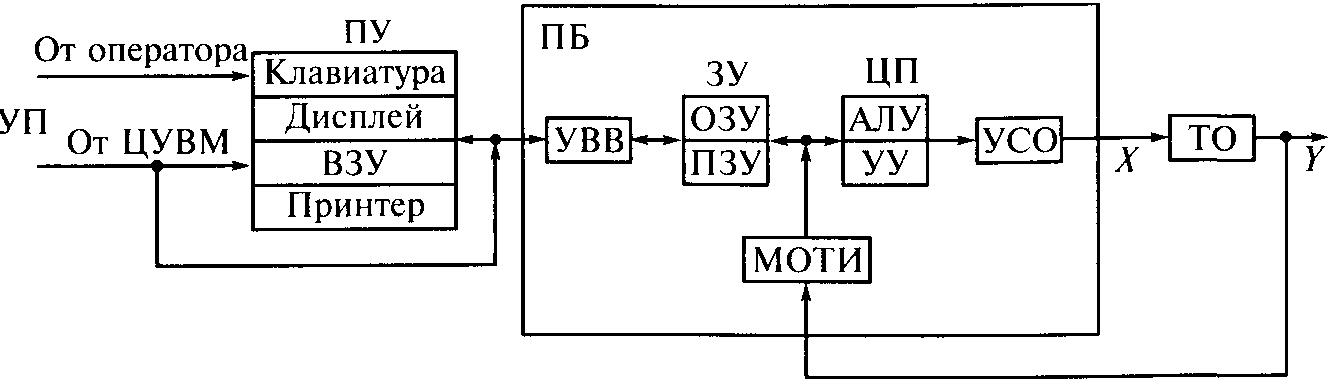
Рис. 1.2. Структура УВМ в составе АСУТП
Конструктивно УВМ выполняется в виде пульта управления (ПУ) и процессорного (системного) блока (ПБ). На рис. 1.2 показано, что
УВМ управляет технологическим объектом (ТО) с параметрами У посредством управляющих сигналов X. Пульт управления является основой рабочего места оператора, осуществляющего контроль работы АСУТП. Через ПУ поступает исходная информация в виде управляющих программ (УП), считываемых с магнитных дисков и дискет внешнего запоминающего устройства (ВЗУ).
С помощью клавиатуры ПУ оператор может составлять и корректировать управляющие программы и контролировать ход управляемого технологического процесса, а дисплей ПУ представляет оператору визуальную информацию о ходе ТП и содержании УП. С помощью принтера производится распечатка отчетно-справочной информации о выполнении производственных заданий. Обмен информацией в УВМ осуществляется через стандартные устройства ввода-вывода (УВВ). Они состоят из параллельного и последовательного интерфейсов (портов), причем для связи внутри ПБ обычно используется параллельный интерфейс. Через последовательный интерфейс реализуется связь с отдаленными корреспондентами, прежде всего с ЦУВМ, если она есть.
Информация, поступающая в ПБ с пульта управления или непосредственно от ЦУВМ через УВВ, запоминается в устройствах памяти — запоминающих устройствах (ЗУ), состоящих из постоянного (ПЗУ) и оперативного (ОЗУ) запоминающих устройств. В ПЗУ содержится операционная система УВМ, инструментальное программное обеспечение для создания УП, сами УП и общие сведения об управляемом технологическом объекте. В ОЗУ хранятся управляющие программы, находящиеся в работе, и текущая информация о ходе реализуемого технологического процесса, состоянии технологического оборудования и самой УВМ.
Основным устройством, осуществляющим переработку поступающей информации в УВМ и выдачу управляющих сигналов, является центральный процессор (ЦП), состоящий из арифметико-логического (АЛУ) и управляющего (УУ) устройств. АЛУ осуществляет арифметическую и логическую обработку информации с выработкой управляющих сигналов, а УУ определяет, какие арифметико-логические операции и в каком порядке должно реализовать АЛУ в соответствии с заданной программой.
Специфическими устройствами, отличающими УВМ от обычных ЭВМ, являются устройства связи с объектом (УСО) и модули обработки технологической информации (МОТИ).
УСО — это модули прямой связи управления. Они преобразуют приходящие с процессора управляющие сигналы, чтобы согласовать их с входными цепями ТО, в то время как МОТИ преобразуют приходящие с ТО сигналы обратной связи (сигналы Y) о параметрах ТО. Если рассматриваемая на рис. 1.2 УВМ является для данного ТО центральной, то она управляет входящими в состав ТО локальными УВМ. В таком случае и УСО, и МОТИ, показанные на рис. 1.2, состоят из стандартных УВВ, объединяющих все УВМ данной АСУТП в информационную и управляющую локальную сеть. Если же рассматривать УВМ, показанную на рис. 1.2, как локальную, то УСО должны обеспечивать согласование управляющих сигналов УВМ с входными цепями различных дискретных цифровых и непрерывных (аналоговых) управляющих устройств нижнего уровня управления, на котором обычно производится управление электроприводами (см. рис. 1.1).
Основные функции модулей УСО в составе ЛУВМ:
• усиление управляющих сигналов с соответствующим преобразованием их по уровню и виду;
• преобразование кодов цифровых управляющих сигналов (параллельного кода в последовательный и др.);
• цифроаналоговое преобразование сигналов перед подачей их на аналоговые управляющие устройства;
• потенциальное разделение цепей управления.
В ЛУВМ МОТИ должны совершить обратное преобразование сигналов обратной связи, идущих от управляющих устройств нижнего уровня управления и от технологического оборудования, к виду, приемлемому для системы сигналов, циркулирующих в УВМ. МОТИ производят:
• согласование уровней дискретных сигналов обратной связи и УВМ;
• аналого-цифровое преобразование аналоговых сигналов обратной связи, поступающих от аналоговых управляющих устройств и исполнительных механизмов;
• преобразование кодов цифровых сигналов обратной связи (последовательного в параллельный и др.);
• потенциальное разделение цепей управления.
В качестве примеров преобразования выходных сигналов УВМ приведем преобразование дискретного управляющего сигнала уровня до 5 В и до 5 мА тока (но предназначенного для включения контактора переменного тока) в переменное напряжение ПО В с током до 2 А, а также преобразование цифрового сигнала, предназначенного для управления электроприводом, в стандартное задающее напряжение в пределах 0... 10 В.
Примером преобразования сигналов обратной связи может служить преобразование сигналов конечных выключателей, переключающих постоянное напряжение 24 В, в стандартный сигнал УВМ напряжением до 5 В. Таким же примером может быть счет импульсов датчиков перемещения, в результате которого перемещение фиксируется в УВМ в виде числа отсчитанных импульсов.
Устройства УСО и МОТИ выполняются в виде модульных конструкций, объединяющих в себе несколько каналов однотипных преобразователей, таких как преобразователи уровней, аналого-цифровые преобразователи и др. При необходимости такие устройства строятся на базе микропроцессоров, например модули управления сервоприводами.
Архитектура функционального модуля ТПТС. Обобщенная структурная схема функциональных модулей приведена на рис. 4.8. В зависимости от типа модулей отдельные узлы (цифро-аналоговые преобразователи (ЦАП), аналого-цифровые преобразователи (АЦП) или схемы согласования уровней (ССУ) двоичных сигналов) могут отсутствовать).

Рис. 4.8. Структурная схема функционального модуля
Ядром модуля является процессорная часть, в состав которой входит микропроцессор Intel 80188, и память процессора, состоящая из оперативной памяти (RAM) и постоянной памяти EPROM и EEPROM. В EPROM хранятся программные блоки, реализующие арифметические и логические функции, присущие всем модулям (сложение, умножение, дифференцирование, сравнение чисел и т. д.), программные блоки, реализующие функции, специфические для конкретного типа модулей (например, управляющие блоки для модулей управления или алгоритмы регулирования для модулей регуляторов) и программные блоки, реализующие функции контроля, логику прерывания и т.п. Программные блоки записываются в EPROM на этапе изготовления.
В EEPROM хранятся программы пользователя и перечень описаний стандартных функциональных блоков, в соответствии с которым они вызываются из EPROM, настраиваются и выполняются. Данные в EEPROM записываются на этапе проектирования конкретного ПТК.
Для обмена информацией по шине в/в предназначена передающая память URAM — двухпортовое оперативное запоминающее устройство ("почтовый ящик"), доступное через один порт внутримодульному процессору, а через второй порт — процессору модуля EAS.
Узел АЦП предназначен для приема аналоговых сигналов, мультиплексирования каналов и преобразования аналоговых сигналов в цифровую форму.
Узел ЦАП преобразует выходные сигналы из цифровой формы в аналоговую и коммутирует их на выходной разъем модуля.
Микропроцессор циклически опрашивает входные сигналы и URAM (информацию, принятую от модуля EAS), обрабатывает принятую информацию по заданной пользователем программе и выдает результаты обработки на выходной разъем модуля и в URAM.-
RAM (Random Access Memory) – оперативное запоминающее устройство (с произвольным доступом).
EEPROM (Electrically Erasable Programmable ROM) – электрически стираемое программируемое ПЗУ.
EPROM (Erasable Programmable ROM) – перезаписываемое программируемое ПЗУ. Неразрушимая память, предназначенная для хранения данных после выключения питания. Информация может быть удалена путём УФО (длина волны обычно 235 нм). Чип EPROM легко распознать по наличию прозрачного кварцевого окна, предназначенного для пропуска УФО.
Структура традиционных АСУ ТП АЭС.
На АЭС СССР функционировал ряд информационно-вычислительных систем (ИВС), осуществлявших функции централизованного сбора информации, сигнализации отклонений, регистрации параметров, расчетов технико-экономических показателей и некоторых характеристик реактора. Первой такой системой явилась ИВС «Карат» II блока Белоярской АЭС, разработанная ВНИИЭМ на базе вычислительных машин УМ-1-НХ. Впоследствии несколько информационно-вычислительных машин ИВ-500 было введено на серийных энергетических блоках с реакторами ВВЭР-440. Наиболее совершенной в 70-е годы являлась информационно-вычислительная система «Скала», построенная на базе ЭВМ ВНИИЭМ-3, пущенная в 1974 г. на I блоке Ленинградской АЭС и выполнявшая большой объем операций, связанных с контролем режима канального реактора. Все перечисленные машины относятся ко второму поколению.
На базе ЭВМ третьего поколения были разработаны ИВС «Комплекс-Уран В» (Нововоронежская и Белоярская АЭС) и «Комплекс-Титан 2» (Запорожская и другие АЭС С ВВЭР-1000).
«Комплекс-Уран В» строился на базе УВК М-7000 (V блок НВ АЭС, Белоярская АЭС) и СМ-2М (1-IV блоки НВ АЭС). В процессе модернизации М-7000 на Белоярской АЭС и ВНИИЭМ-3 на Ленинградской АЭС были заменены на СМ-2М К 125 3/6.
Традиционная архитектура АСУ ТП с реакторами ВВЭР-1000 основана на применении большого количества каналов контроля и управления, которые функционируют параллельно и почти независимо друг от друга. Результаты измерения либо поступают на входы регуляторов, электронных схем технологических защит, блокировок, либо выводятся на индивидуальные устройства отображения - стрелочные приборы, самописцы и т. п. Управление производится при помощи индивидуальных ключей, для работы с которыми операторы-технологи вынуждены активно перемещаться по блочному пульту, а в сложных ситуациях - использовать помощников. Это не допускается регламентом эксплуатации, но практикуется из-за недостатков в конструкции существующих блочных пультов. В современных АСУ ТП необходимо обеспечить комфортные рабочие места для операторов-технологов, на которых средства визуального контроля расположены в зоне прямой видимости, а органы управления - в пределах рабочего места.
АСУ ТП АЭС призвана решать две основные группы функций - информационные и управляющие.
Информационные функции - сбор и обработка, распределение и представление информации о работе оборудования и ходе технологического процесса, а также выполнение расчетов, связанных с эффективностью работы энергетического блока и АЭС в целом.
Управляющие функции осуществляются в виде дистанционного и автоматического управления агрегатами и механизмами, автоматического регулирования, технологических защит и оптимизации технологического процесса.
Для реализации указанных функций имеется ряд следующих систем и подсистем:
- система технологического контроля;
- подсистема дистанционного и автоматического управления;
- подсистема технологической и аварийной сигнализации;
- подсистема технологических защит;
- система внутриреакторного контроля;
- система (аппаратура) контроля нейтронного потока;
- система (аппаратура) контроля герметичности тепловыделяющих элементов;
- централизованная информационная система радиационного контроля.
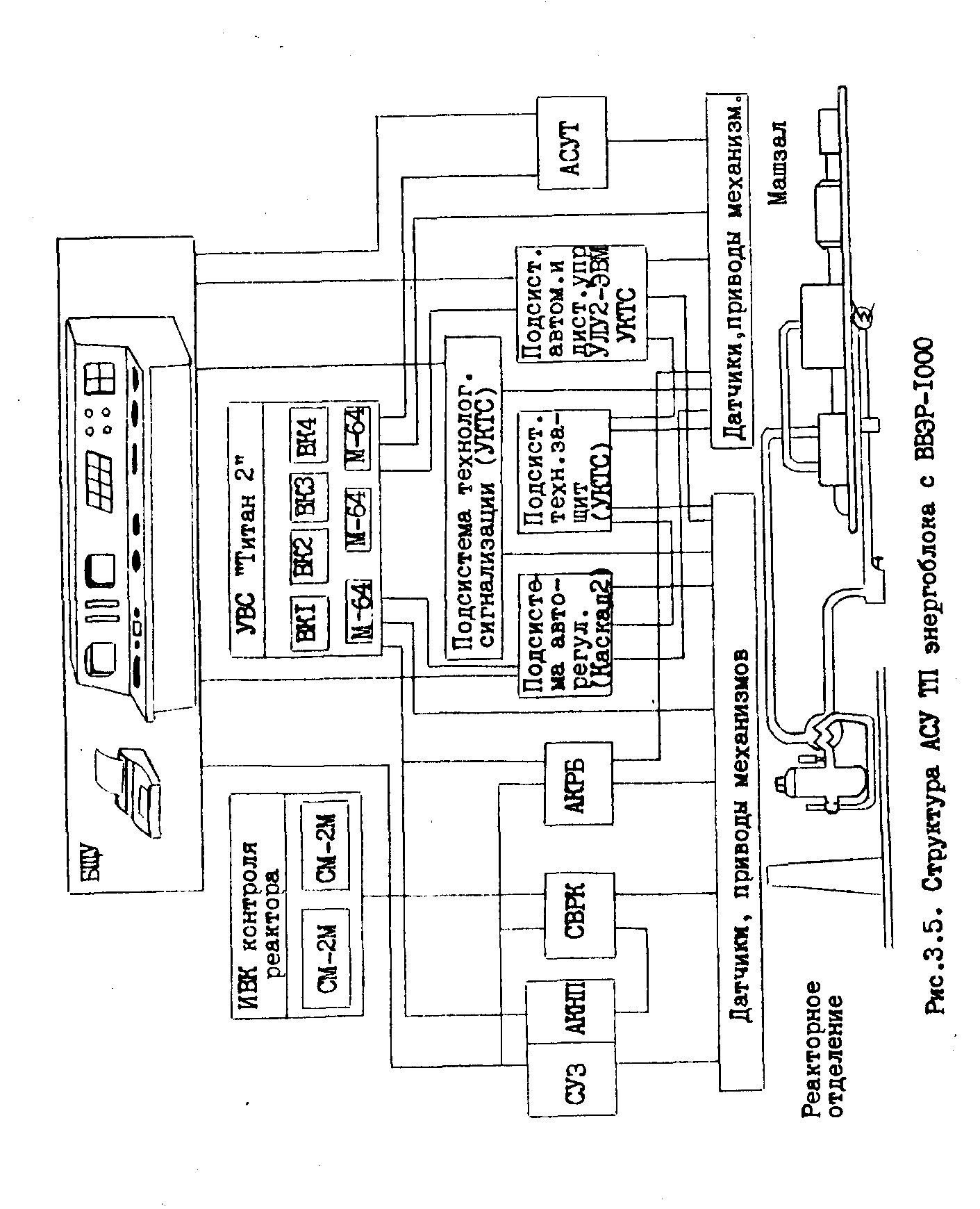
Функции АСУ ТП АЭС реализуются комплексом технических средств, в основном специально разработанных для данной серии унифицированных АЭС с реакторами ВВЭР-1000
Информационно-вычислительные и управляющие системы типа "Комплекс-Титан 2" (УВС) в комплекте с унифицированным комплексом технических средств (УКТС) и устройством логического управления (ФГУ)
УВС "Комплекс-Титан .2" является основной частью автоматизированной системы управления технологическими процессами (АСУ ТП) АЭС с атомными энергоблоками ВВЭР-1000.
Система предназначена для выполнения следующих функций:
- сбор и первичная обработка информации о технологических параметрах;
- отображение информации о непосредственно измеряемых и расчетных параметрах на экранах видеотерминалов оператора и сигнализация об их отклонениях;
- регистрация технологических параметров (их отклонений) и событий в нормальных и аварийных ситуациях;
- расчет ядерно-физических и технологических параметров, а также технико-экономических показателей;
- диагностика состояния основного технологического оборудования;
- анализ работы подсистем АСУ ТП;
- расчет и выдача значений уставок и коэффициентов;
- диагностирование технологических ситуаций и состояния основного оборудования и оборудования УВС;
- обмен информацией с общестанционным вычислительным комплексом и другими подсистемами АСУ ТП энергоблока.
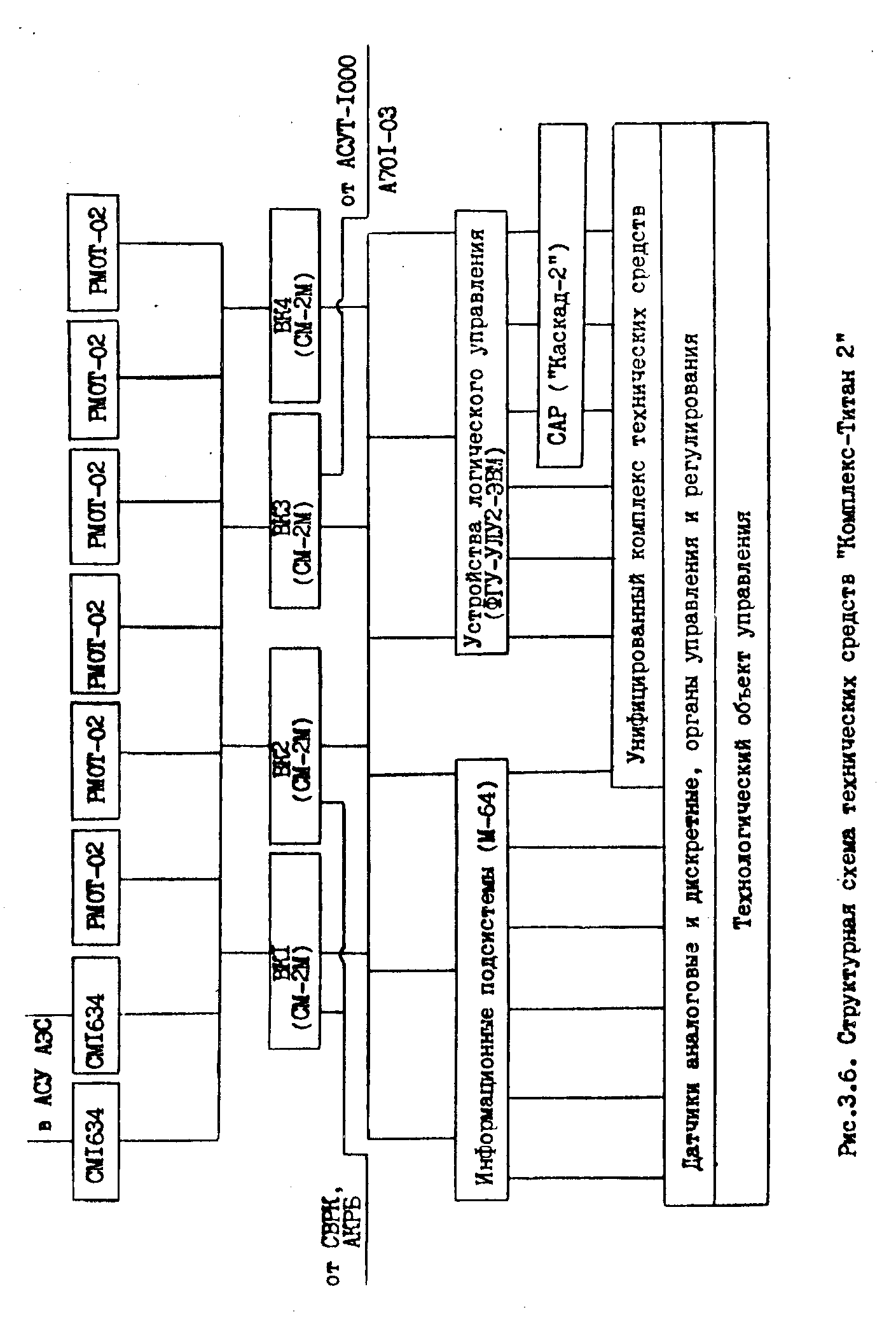
Структура УВС
В состав УВС "Комплекс-Титан 2", структурная схема которой представлена на рис.2, входят четыре специфицированных вычислительных комплекса (СВК) СМ-2М, два вычислительных комплекса CM-I634, три комплекса связи с объектом (КСО) М-64 и шесть комплексов связи с оперативным персоналом (РМОТ).
СВК СМ-2М образует единую многомашинную вычислительную систему, выполняющую расчетные и логические задачи и задачи управления РМОТ и КСО; CM-I634 предназначены для увеличения возможностей подключения к СВК СМ-2М систем АСУ ТП и для связи с верхним уровнем управления; РМОТ - для организации рабочих мест операторов-технологов, оператора УВС и рабочего места заместителя начальника смены; КСО - для ввода и предварительной обработки информации, поступающей от датчиков технологического объекта управления.
Для целей автоматического и дистанционного управления применены унифицированный комплекс технических средств (УКТС) и устройства логического управления второго уровня ФГУ-УЛУ-2 ЭВМ.
УКТС является нижним уровнем АСУ ТП и обеспечивает прием команд от оператора или от автоматических устройств более высокого уровня, их обработку и выдачу команд на исполнительные органы, а также прием информации о положении объектов управления и выдачу этой информации в другие подсистемы АСУ ТП.
УКТС реализует следующие функции дискретного управления: дистанционного управления, технологических защит и блокировок, технологической сигнализации.
Подсистема автоматического регулирования решена на аппаратуре "Каскад-2", выполненной на микроэлектронной элементной базе в приборном исполнении. В качестве основных источников информации использованы первичные преобразователи типа"Сапфир-22" с тензочувствительными элементами.
Субкомплекс видеотерминальный для компоновки рабочих мест операторов-технологов РМОТ-02-03 (СМП 1634.7801.03)_
Субкомплекс видеотерминальный для компоновки рабочих мест операторов-технологов РМОТ-02-ОЗ (рис.5 и 6) предназначен для использования в качестве основного средства общения оператора-технолога со специализированным вычислительным комплексом в АСУ ТП АЭС, при этом:
I. По вызову оператора-технолога обеспечивается представление на экранах:
- мнемосхем объекта управления или их фрагментов с индикацией значений параметров, представленных на данном фрагменте;
- мозаичных изображений (картограмм) объекта, например зоны реактора;
- графиков изменения значений параметров;
- текущего значения параметра, технологических границ контроля, периода опроса и констант обработки.
Анализируя традиционные средства контроля, управления и диагностики. используемые на блочных пультах АЭС и в помещениях АСУ TII. отметим следующие серьезные недостатки:
1. Важные задачи, вытекающие, в частности, из требований МАГАТЭ, либо вообще не решаются, либо решаются путем ввода дополнительных систем, расположенных вне рабочей зоны операторов-технологов. К ним. в частности, относятся системы представления параметров безопасности, внедренные зарубежными фирмами в рамках безвозмездной помощи на некоторых АЭС (Калининской, Нововоронежской и других), а также разнообразные системы информационной поддержки, вибродиагностики и другие.
2. Состояние средств АСУ TII контролируется в основном вручную. Сигнализация только некоторых наиболее важных отказов (по системам управления защитами, автоматизированной системе контроля нейтронного потока и др.) предусмотрена на блочном пульте. Непрерывный централизованный контроль оборудования АСУ ТП отсутствует.
3. Временные задержки в существующих IIBC составляют более 5 секунд, что не соответствует современным требованиям - не более 2.5 секунд от измерения до отображения.
4. Существующие И ВС не обеспечивают непрерывный режим работы в течение всего срока эксплуатации АЭС. что недопустимо для управляющих систем.
5. В традиционных АСУ ТП только часть информации сохраняется в электронной форме. Наиболее важные параметры регистрируются самописцами и операторами-технологами, в функции которых входят визуальное считывание показаний приборов и запись в журналах.
Централизация информации на традиционных блочных пультах происходит только в информационно-вычислительных системах (ИВС), примерами которых являются ТИТАН и система внутриреакторного контроля (СВРК). Управление оборудованием АЭС при помощи традиционных ИВС не предусмотрено.
Система ТИТАН является основной информационной системой, которая через устройства связи с объектом получает данные о состоянии энергоблока, записывает их в архив на магнитную ленту и отображает обработанную информацию на широкоформатных дисплеях, размещенных на блочном пульте для операторов-технологов реакторного и турбинного отделений. При помощи функциональной клавиатуры операторы-технологи АЭС вызывают на экраны дисплеев электронные фрагменты технологических подсистем и контролируют ход технологического процесса в реальном времени. Дополнительно по заказу, операторы-технологи могут получать распечатки протоколов текущих событий, в которых содержатся значения аварийной и предупредительной сигнализации и данные о переключениях оборудования.
Эта система, передовая для своего времени (70-е годы), используется до сих пор. Однако технические средства и программное обеспечение, при помощи которых она была создана, не способны к модификации и адаптации к современному состоянию вычислительной техники, новым требованиям и задачам. Поэтому системы ТИТАН и СВРК не реконструируются, а заменяются полностью. Это приводит к значительным экономическим издержкам на отечественных и зарубежных АЭС, что подрывает престиж отечественной атомной промышленности.
СВРК предназначена для внутриреакторного контроля и является примером сложной системы с точки зрения заложенных в нее алгоритмов обработки информации. Ее дисплеи расположены на блочном пульте в зоне видимости оператора-технолога реакторного отделения. Дисплеи систем ТИТАН и СВРК аналогичны по конструкции, но не являются взаимозаменяемыми: информацию по технологическим системам и активной зоне нельзя вывести на один дисплей. Это обстоятельство усложняет работу оператора-технолога и является одним из недостатков традиционных пультов АЭС с реакторами ВВЭР-1000. Для новых систем требуется решить проблему интеграции информации из разных источников так, чтобы оператор-технолог мог сконцентрировать необходимую ему информацию на одном дисплее независимо от того, в какой подсистеме АСУ ТП она регистрируется.
Был проведен анализ особенностей АЭС с реакторами ВВЭР-1000, влияющих на выбор структуры и функций СВБУ. К ним, в частности, относятся:
- непрерывность технологического процесса;
- сложность и многообразие применяемого технологического оборудования - большое количество запорной и регулирующей арматуры, механизмов и агрегатов;
- значительное разнообразие измеряемых параметров;
- высокая стоимость простоя энергоблока, негативные экономические последствия от невыполнения системой автоматизации возлагаемых на нее задач;
- наличие как быстропротекающих, так и инерционных ядерно-физических и тепловых процессов, контролируемых как традиционными средствами, так и при помощи специализированных вычислительных программ;
- сложная структура АСУ ТП, включающая в себя большое количество систем, разрабатываемых различными организациями на основе разнородных программных и технических средств;
- использование в АСУ ТП преимущественно современных цифровых устройств автоматики, обладающих развитыми средствами самодиагностики;
- централизация информации о состоянии технологического объекта управления (ТОУ) и АСУ ТП, вырабатываемой всеми системами АСУ ТП, и формирование команд дистанционного управления средствами вычислительной техники;
- наличие связей АСУ ТП энергоблока с АСУ АЭС и другими АСУ.
На основе анализа особенностей методов управления АЭС с реакторами ВВЭР-IOOO было показано, что СВБУ должна получать информацию о состоянии ТОУ и элементов программно-технического комплекса (НТК) АСУ ТП от всех систем АСУ TП без исключения.
Также было показано, что СВБУ должна передавать команды управления не всем, а только следующим системам АСУ ТП:
- системе автоматической противопожарной защиты (САППЗ);
- системе контроля и управления оборудованием нормальной эксплуатации (НЭ) реакторного отделения (СКУ РО);
- системе контроля и управления оборудованием специальной водоочистки (СКУ СВО);
- системе контроля и управления вентиляционным оборудованием (СКУ В);
- системе контроля и управления турбинным отделением (СКУ ТО);
- системе контроля и управления вспомогательным оборудованием турбогенератора (СКУ ТУ);
- системе радиационного контроля (СРК).
Для формулировки автоматизируемых функций и задач СВБУ была построена следующая информационная модель, отражающая способы управления объектом с участием СВБУ.
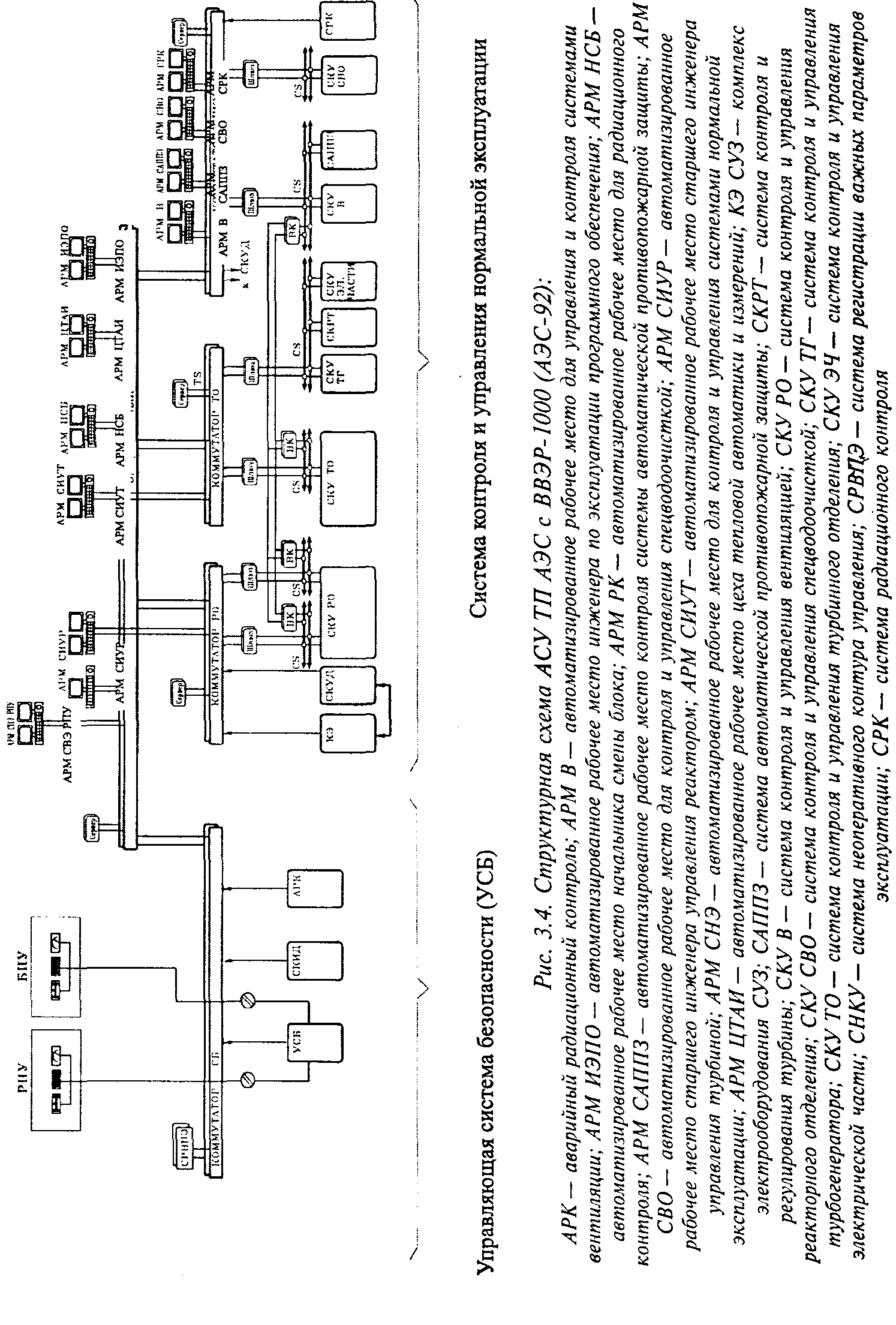
Информационная модель СВБУ включает в себя автоматизированные рабочие места (АРМ) на блочном пульте управления (БПУ), резервном пульте управления (РНУ), в цехе тепловой автоматики и измерений (ТАИ). На рис.1 представлен состав АРМ
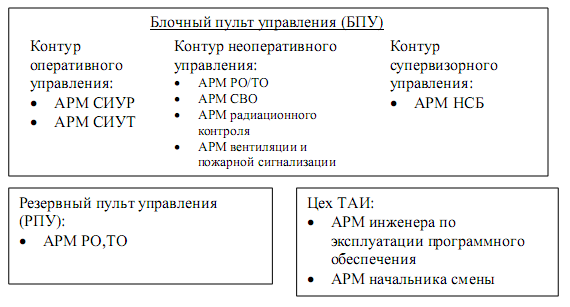
![]()
Для решения задачи построения СВБУ, удовлетворяющей всем необходимым требованиям, предложена новая информационная технология, реализованная в форме информационно-управляющей вычислительной системы (ИУВС), которая изображена на рис. 2. Архитектура ИУВС включает в себя две локальные вычислительные сети (ЛВС), обозначенные на рисунке как ЛВСО (основная) и ЛВСР (резервная), посредством которых элементы ИУВС обмениваются информацией между собой.
В состав ИУВС входят два сервера (СО и СР ), N рабочих станций (РС1, ..., РСN,) предназначенных для контроля и управления АЭС; М дублированных шлюзовых компьютеров (Ш1О, Ш1Р…, ШМО, ШМР),
при помощи которых ИУВС присоединяется к другим подсистемам АСУ ТП, и рабочие станции администрирования программных и технических средств (АТПС), обозначенные на рис. 2 как РСОАТПС (основная) и РСРАТПС(резервная).
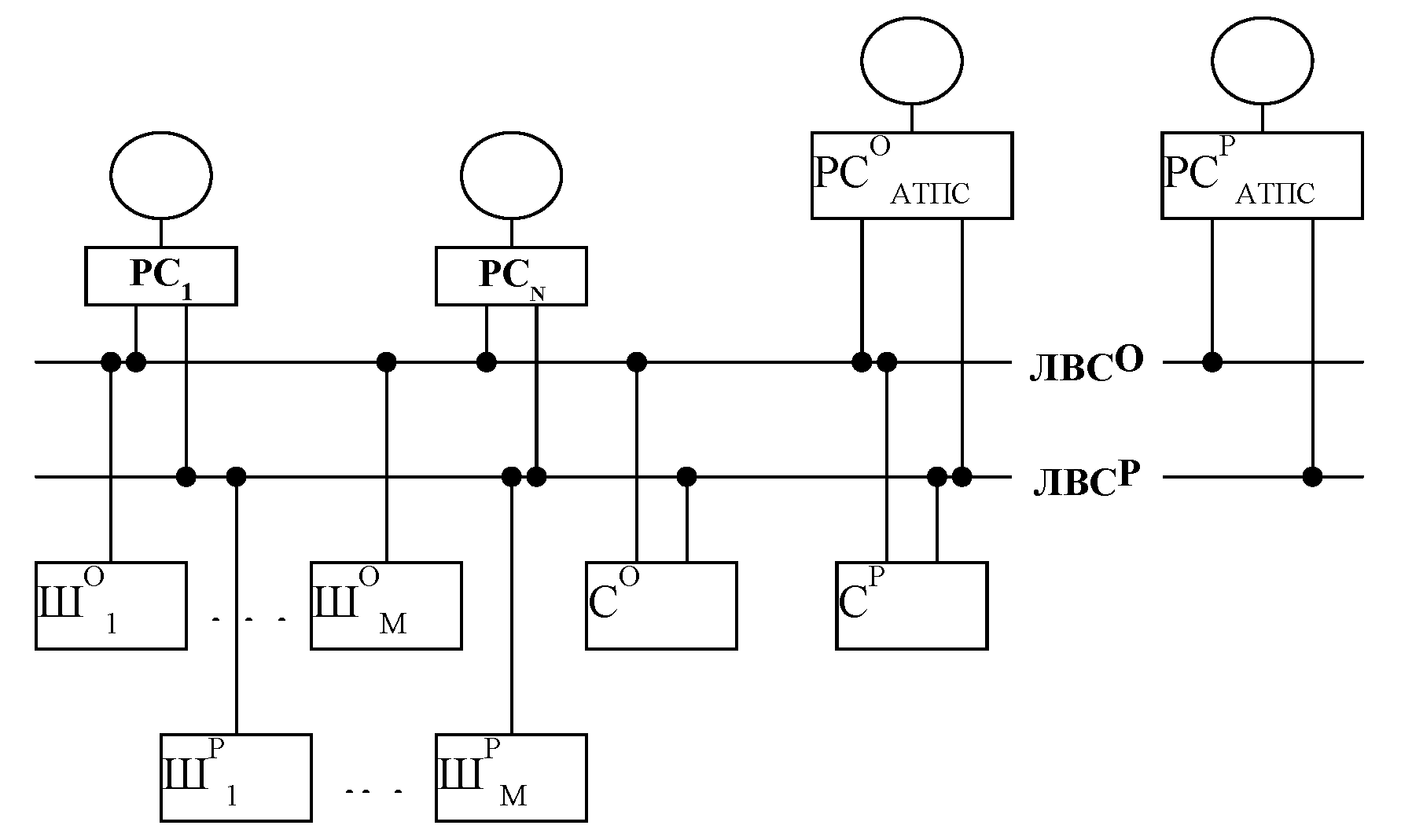
Рис. 2 Обобщенная структура информационно-управляющей вычислительной системы.

Рис. Двухдисплейная рабочая станция РС-2.
1 – мониторный кожух
2 – монитор
3 – столешница
4 – МПКУ
5 – клавиатура
6 – передняя дверь
7 – тумба
8 – крышка технологического отверстия
9 – манипулятор
10 – цоколь
В предложенной информационной технологии общий алгоритм функционирования ИУВС должен осуществлять обработку четырех информационных потоков: потока сигналов контроля состояния АЭС, потока команд управления оборудованием АЭС, потока сигналов диагностики ИУВС и потока команд управления
ИУВС.
Поток сигналов контроля формируется в системе низовой автоматики, которая в АСУ ТП АЭС разбита на подсистемы, связанные с управлением определенными технологическими подсистемами. На рис. 2 эти подсистемы АСУ ТП пронумерованы от
1 до М.
Структура потока от каждой подсистемы АСУ ТП содержит значения аналоговых и дискретных сигналов, которые циклически передаются в шлюзовые компьютеры. С учетом большого количества сигналов эти потоки суммарно могут составлять весьма большую величину - до нескольких тысяч в секунду.
Функция шлюзовых компьютеров (шлюзов) состоит в первичном сжатии этих потоков. Для этого применяется алгоритм апертурной фильтрации. Он состоит в том, что каждое последующее значение сигнала сравнивается с предыдущим и проходит через фильтр только в том случае, если их разница составляет определенную величину (апертуру).
Выполненные расчеты и проведенные эксперименты показали, что первичное сжатие способно не менее чем на 70% сократить поток аналоговых сигналов, в 100 раз сократить поток дискретных сигналов, которые формируются на основе данных теплотехнического контроля, и более чем в миллион раз сократить поток сигналов диагностики оборудования АСУ ТП.
Далее сжатый поток данных от шлюзов должен поступать в серверы, которые выполняют функции архивирования и сортировки информации по ее назначению. Информация разделяется на аналоговые параметры, параметры, характеризующие состояние технологического оборудования, на сигнализацию и на вспомогательные информационные сигналы. В частности, на основе значений троированных датчиков формируется одно значение аналогового параметра; на основе нескольких десятков дискретных параметров, характеризующих состояние механизмов, формируются специальные сообщения о состоянии механизма; из полного списка дискретных сигналов, формируемых алгоритмами АСУ ТП, вычленяется аварийная и предупредительная сигнализация и т. д. В результате в серверах происходит значительное уплотнение информации, которая далее поступает на рабочие станции (РС).
Проведенные расчеты и эксперименты показали, что в серверах можно достичь сжатия информации в несколько раз для аналоговых и в десятки раз для дискретных сигналов.
В функции РС входит отображение поступающей информации в сжатой проблемно-ориентированной форме, которая зависит от решаемых операторами АЭС задач и той роли, которую разработчики АСУ ТП назначают каждой из рабочих станций, каждому дисплею и каждому компьютерному окну. Таким образом, на заключительной стадии обработки данных в РС для решения задачи их сжатия предложен полуавтоматический способ с участием человека. При этом в функции РС входит представление информации различными способами, среди которых:
- функционально-ориентированные мнемосхемы, содержащие тщательно отобранную информацию, необходимую для выполнения технологических инструкций;
- обобщенные мнемосхемы, содержащие основные параметры АЭС, групповую и обобщенную сигнализацию, при помощи которых операторы имеют возможность оценивать общее состояние АЭС;
- протокол текущих событий, в котором представлена сигнализация, с возможностью селекции сообщений по многим признакам - по времени, по важности, по оборудованию, по техническим подсистемам;
- прочие способы отображения детальной информации: графики, гистограммы, цифровые индикаторы, таблицы и т. п.
В обязанности оператора предлагается оставить навигацию и выбор нужных способов представления информации в зависимости от ситуации и решаемых задач.
Проведенные исследования с применением компьютерных моделей показали, что предложенный полуавтоматический способ решения задачи сжатия информации на РС эффективен и позволяет создавать конфигурации способов представления информации, достаточные для решения основных задач управления большими техническими системами типа АЭС.
В предложенном общем алгоритме обратный поток команд управления оборудованием начинается на рабочих станциях. Затем команды поступают в серверы и далее через шлюзы передаются для исполнения в соответствующие подсистемы АСУ ТП.
Для реализации управления оборудованием и автоматикой предложено использовать специальные всплывающие окна, которые позволяют вводить команды управления однотипными способами.
Проведенные исследования с применением компьютерных моделей показали, что предложенный способ управления достаточен для организации управления всеми видами технологического оборудования.
В предложенном общем алгоритме поток сигналов о состоянии типовой ИУВС формируется во всех элементах, представленных на рис. 2. Он содержит сигналы о состоянии средств вычислительной техники и программного обеспечения, в частности: размер свободной памяти, сетевая загрузка, точность синхронизации времени, сигналы о старте/останове программ и др. Кроме того, в поток входит сигнализация о неисправностях технических средств и несанкционированных нарушениях целостности технических и
программных средств. Поток поступает в резервированные
компьютеры РСО АТПС и РСР АТПС, где информация структурируется и отображается для использования эксплуатационным персоналом.
В предложенном общем алгоритме поток сигналов управления
типовой ИУВС формируется в РС атпс и РС атпс и состоит из двух составляющих. Первая представляет собой сигналы синхронизации единого времени для всех элементов вычислительной техники, изображенных на рис. 2. Был предложен механизм синхронизации времени по протоколу NTP.
Вторая составляющая потока сигналов управления содержит команды эксплуатационного персонала по управлению элементами ИУВС. К ним, в частности, относятся команды на старт/останов программ, переключение на работу с основными/резервирующими элементами и др.
Проведенный анализ показал, что наличие специализированных средств контроля и управления (РСО атпс и РСР атпс) дает возможность вовремя, т. е. с задержкой не более одной минуты, обнаруживать неисправности и своевременно производить ремонт. Это обеспечивает теоретически бесконечный срок безостановочной работы системы.
Было предложено обеспечивать требования к защите от несанкционированного доступа конструкцией технических средств (наличие замков с датчиками, специальных программ слежения и охраны данных) и наличием специализированных средств оперативного контроля (РСО атпс и РСР атпс), на которые с минимальной задержкой (несколько секунд) выводится сигнализация о несанкционированных проникновениях, что позволяет оперативно принимать необходимые меры.
На основе новой информационной технологии, функций и задач СВБУ, сформулированных во второй главе, была разработана и обоснована структура СВБУ.
СВБУ представляет собой распределенную вычислительную систему, составленную из подсистем, каждая из которых реализована на основе технологии ИУВС.
СВБУ включает в себя следующие функциональные подсистемы:
- информационную подсистему начальника смены (ИНС);
- информационно-управляющую подсистему РО оперативного контура управления БПУ (ИУРО);
- информационно-управляющую подсистему ТО оперативного контура управления БПУ (ИУТО);
- информационно-управляющую подсистему неоперативного контура управления БПУ (ИУН);
- информационно-управляющую подсистему НЭ РПУ
(ИУРПУ);
- подсистему администрирования технических и программных средств (АТПС) СВБУ.
Структурная схема СВБУ представлена на рис. 3, на которой обозначено:
ИНС включает в свой состав РС JCV10 и предназначена для:
- получения необходимой информации начальником смены блока;
- работы специально уполномоченного персонала в аварийных режимах работы блока;
- получения необходимой информации оперативным персоналом смены, заступающей на дежурство.
ИУРО оперативного контура управления БПУ включает в свой состав РС JCY10, JCY20, JCY30, JCZ10, JCZ20 и предназначена для осуществления со стороны СИУР контроля и управления технологическими системами нормальной эксплуатации реакторного отделения. На средства отображения данной подсистемы выводится также информация по системам безопасности. Дистанционное управление системами безопасности через данную подсистему не предусматривается.
ИУТО оперативного контура управления БПУ включает в себя РС JCS10, JCS20 и предназначена для осуществления со стороны СИУТ контроля и управления системами, участвующими в основном технологическом процессе выработки электроэнергии.
ИУН включает в свой состав РС JCU10, JCU 20, JCU 30,
JCU40, JCU 50 и реализует информационные и управляющие функции следующих систем:
- вентиляции;
- спецводоочистки;
- радиационного контроля;
- пожарной сигнализации и автоматики;
- вспомогательных подсистем реакторного и турбинного отделения.
ИУРПУ (JCR10) предназначена для отображения состояния и управления ограниченным набором параметров и оборудования РО и ТО нормальной эксплуатации в условиях, когда управление с АРМ БПУ невозможно.
АТПС СВБУ (JCV 30, JCV40) предназначена для реализации сервисных и вспомогательных функций СВБУ. Эти функции предназначены для обеспечения нормальной работы самой АСУ ТП, а также для быстрого обнаружения неисправностей в технических и программных средствах и их ликвидации.
На основе анализа особенностей АСУ ТП АЭС с реакторами ВВЭР-1000 были сформулированы основные требования к реализации СВБУ:
• Количество сигналов: 8 тыс. аналоговых; 100 тыс
дискретных, 360000 диагностических.
• Надежность:
o Средняя наработка на отказ подсистемы (ТСР) - не
менее 10 5 часов, o Коэффициент неготовности подсистемы (Кнг) — не
более 10-5.
• Время обновления информации на экранах дисплеев и передачи команд управления — не более 2-х секунд при потоке в 3 тыс. обновлений сигналов в секунду.
• Гарантия — 30 лет с учетом модернизаций технических средств.
• Поддержка работы на русском и английском языках.
Общий упрощенный алгоритм функционирования серверов состоит в серии шагов, выполняемых циклически:
1) выдача шлюзам запросов на получение информации;
2) прием информации от шлюзов и ее обработка;
3) прием от РС запросов на получение информации и команд дистанционного управления;
4) передача информации РС, от которых получены запросы;
5) передача команд дистанционного управления в шлюзы;
6) поддержание единого времени.
При взаимодействии абонентов сети СВБУ был предложен и обоснован следующий основной принцип: все посылки в адрес абонента осуществляются только по его запросу/разрешению; на каждый запрос осуществляется только один акт передачи информации. Такой подход устраняет возможность стохастического накапливания посылок в буферах системы и их переполнения, исключает клинчевые ситуации в сети.
Структура технических средств СВБУ АСУ ТП АЭС.
Предложенный и реализованный комплекс технических средств (КТС) СВБУ представляет собой совокупность изделий, реализующих функции сервера, рабочей станции, коммутатора ЛВС, распределительных устройств ЛВС, линий связи ЛВС.
На основе анализа требований к техническим средствам, выполненных руководством атомной промышленности был сделан вывод о возможности и желательности разработки КТС СВБУ на платформе Compact PCI в России в Научно-исследовательском институте измерительных систем им. Ю.Е. Cедакова (г. Нижний Новгород). КТС был успешно разработан и в настоящее время выпускается как серийное изделие.
На основе новой информационной технологии ИУВС, описание которой приводится во второй главе был спроектирован, разработан, испытан, прошел этапы верификации и валидации комплекс программ СВБУ.
Разработанный комплекс программ СВБУ представляет собой совокупность программных средств, обеспечивающих реализацию ее целей, функций и задач. Дополнительно специфика условий применения программного обеспечения на АЭС требует, чтобы ПО было разработано с соблюдением международных требований к качеству процесса разработки.
В состав разработанного ПО входят следующие элементы:
1) операционная система (ОС);
2) ПО защиты информации от несанкционированного доступа;
3) прикладное программное обеспечение (ППО);
4) тестовое программное обеспечение.
Выбор операционной системы (ОС) для СВБУ был проведен на основе рекомендации европейской комиссии по ядерной энергетике.
Согласно этим рекомендациям был произведен анализ функциональных и эксплуатационных характеристик, которым должна удовлетворять ОС как программный продукт, получаемый в "готовом виде" (Pre-existing software).
Основные требования к ОС СВБУ были сформулированы следующим образом:
1) отсутствие лицензионных ограничений на поставку;
2) наличие возможности модификации и верификации;
3) поддержка основными производителями технических средств
и ПО.
На основе анализа требований и ситуации на рынке ОС были сделаны выводы о невозможности применения готовых ОС и о необходимости и возможности разработки новой ОС на базе ПО с открытым кодом семейств LINUX и UNIX. Такая ОС была разработана в Институте проблем управления им. В.А.Трапезникова РАН. В настоящее время эта ОС, носящая имя LICS, успешно применяется на отечественных и зарубежных АЭС.
В состав ПО защиты информации от несанкционированного доступа было включено два комплекса программ:
- программные агенты для контроля состояния вычислительных процессов;
- программы централизованного контроля доступа. Программные агенты являются универсальными комплексами
программ, которые инсталлируются на все РС и серверы.
Программы централизованного контроля доступа предназначены для работы на РС системы АТПС.
Разработанное ППО СВБУ состоит из комплексов программ, каждый из которых предназначен для работы с РС или сервером определенной подсистемы СВБУ. Во всех РС одной подсистемы СВБУ используется один и тот же комплекс ППО, так же как и для серверов одной подсистемы СВБУ. Таким образом, для одной подсистемы СВБУ используется только два типа комплексов ППО: ППО для РС и ППО для серверов. Каждый комплекс ППО представляет собой совокупность рабочего программного обеспечения (РПО) и рабочей базы данных (РБД), генерируемой инструментальной системой "Конфигуратор".
Для каждой подсистемы СВБУ РПО реализовано в виде двух универсальных субкомплексов: субкомплекса программного обеспечения сервера (ПОС), единого для всех серверов, и субкомплекса программного обеспечения рабочей станции (ПОРС), единого для всех рабочих станций. Для обмена сигналами со смежными подсистемами АСУ ТП разработано специализированное интерфейсное ПО (ИПО), которое интегрируется в состав смежных подсистем.
Человеко-машинный интерфейс (ЧМИ), реализованный в СВБУ АСУ ТП АЭС решает задачу обеспечения операторов-технологов и другого эксплуатационного персонала АЭС эффективными средствами контроля, управления и диагностики параметров энергоблока и АСУ ТП.
Впервые был предложен ЧМИ АСУ ТП АЭС с реакторами ВВЭР-1000, основанный на применении средств вычислительной техники. За исключением ограниченного набора индивидуальных ключей управления и цифровых индикаторов в аварийных системах энергоблока, компьютерный ЧМИ СВБУ охватывает все посты и рабочие места энергоблока, при помощи которых осуществляется его управление.
На основе анализа отечественной и зарубежной литературы, особенностей управления энергоблоками с реакторами ВВЭР-1000, норм и стандартов в атомной промышленности, результатов компьютерного моделирования был отобран ограниченный, достаточный для организации контроля, управления и диагностики энергоблока набор элементов ЧМИ:
■ мнемосхема;
■ диаграмма;
■ график статический - статическая кривая значений параметра, шкала значений параметра, дополнительная шкала (возможно временная);
■ график динамический - динамическая кривая значений параметра, шкала значений параметра, временная шкала;
■ таблица - табулированная алфавитно-цифровая информация с явно выделенными границами полей;
■ гипертекст - форматированная текстовая информация, рисунки, схемы, фотографии;
■ текст - форматированная алфавитно-цифровая информация;
■ текст-меню - форматированная алфавитно-цифровая информация;
■ падающее меню - кнопки с текстовыми надписями, разворачивающиеся по мере воздействия на них;
■ кнопочное меню - кнопки с текстовыми надписями;
■ диалог - поля ввода текстовой информации с клавиатуры, поля вывода текстовой информации, кнопки с надписями, индикаторы положения.
В ЧМИ СВБУ был применен многооконный интерфейс. Он включает несколько десятков окон, каждое из которых выполняет одну из функций, к которым в частности относятся:
• отображение состояния параметров технологического процесса и технологического оборудования:
• технологическая сигнализация;
• ввод управляющих воздействий;
• информационная поддержка;
• навигация - организация доступа к нужным окнам, открытии закрытие, и другие действия.
Функциональное описание главных регуляторов АЭС
1 Общие требования
Главными регуляторами станции являются регуляторы, которые имеют непосредственное влияние на производство энергии на АЭС.
К основным параметрам регулирования относятся:
мощность реактора;
давление пара во втором контуре;
давление в первом контуре;
уровень в компенсаторе давления;
уровень в парогенераторе;
скорость разогрева-расхолаживания первого контура и компенсатора давления.
Основные системы регулирования управляют мощностью реактора и турбины таким образом, чтобы при желаемом уровне мощности первый и второй контуры работали в энергетическом и материальном балансе.
Системы автоматического регулирования должны обеспечить поддержание основных технологических параметров в допустимых пределах или изменения их по определенному (заданному) закону во всех возможных режимах нормальной эксплуатации и режимах отклонений от нормальных условий эксплуатации без возникновения автоколебаний за счет взаимодействия регуляторов в процессе регулирования.
Должна быть предусмотрена возможность ручного регулирования параметров. При этом переход с автоматического регулирования на ручное и обратно не должен нарушать ход технологического процесса.
2 Принципы регулирования
Существуют два способа регулирования мощности станции:
электрическая мощность регулируется системой регулирования турбины, а технологические параметры регулируются системой регулирования реактора, т.е. режим следования реактора за турбиной;
мощность реактора регулируется регулятором нейтронной мощности, а технологические параметры регулируются системой регулирования турбины, т.е. режим следования турбины за реактором.
Первый режим используется для нормальной работы на мощности, а второй режим в основном при малых уровнях мощности во время пуска и останова.
3 Функциональное описание главных регуляторов станции
Система регулирования мощности реактора предназначена для работы в следующих режимах:
программа поддержания постоянного давления в главном паровом коллекторе (режим “Т”);
программа поддержания постоянной величины плотности нейтронного потока (режим “Н”).
Базовыми режимами работы АРМР и системы управления турбиной являются режим поддержания теплотехнического параметра АРМР – давления пара в ГПК (режим “Т”) и режим поддержания мощности турбины система управления турбиной в соответствии с заданным значением (режим “РМ”), соответственно.
При возникновении требований на переход АРМР из режима “Т” в режим поддержания мощности реактора (режим “Н”) (срабатывание ПЗ, превышение заданного значения нейтронной мощности) АРМР переходит в режим “Н”, при этом и система управления турбиной автоматически переходит в режим поддержания заданного давления пара в ГПК (режим “РД”) после поступления соответствующего сигнала из АРМР. После снятия требований на работу АРМР в режиме “Н” и стабилизации мощности реактора на заданном уровне с учетом погрешности регулирования, АРМР переходит в режим “Т”, что автоматически вызывает переход системы управления турбиной в режим “РМ” после поступления соответствующего сигнала из АРМР.
При одновременном возникновении требований на работу системы управления турбиной в режиме “РД” (поступает сигнал от АРМР о переходе в режим “Н”) и в режиме “РМ” (изменение заданного значения мощности турбогенератора) система управления турбиной остается в режиме “РД”
Все необходимые параметры, управляющие алгоритмы и режимы должны быть определены и уточнены в соответствии с результатами динамических расчетов.
Основными управляемыми и регулируемыми величинами ядерного энергетического блока при нормальных режимах эксплуатации являются:* электрическая мощность NЭ, давление пара в контуре Рп, уровень воды в барабане парогенератора hб, температура теплоносителя на входе в реактор θВХ и на выходе из него θВЫХ, плотность потока нейтронов в A3 реактора п.
Для возможности целенаправленного воздействия на эти величины энергоблок снабжается следующими регулирующими органами: подвижными регулирующими стержнями, перемещение которых μCT меняет плотность потока нейтронов (а следовательно, мощность реактора); регулирующими клапанами на линии подвода питательной воды к ПГ (регулирующее воздействие μпв); задатчиком частоты (синхронизатором) турбогенератора, воздействием на который |μсх можно осуществлять перемещение клапанов на линии подвода пара к турбине μп.
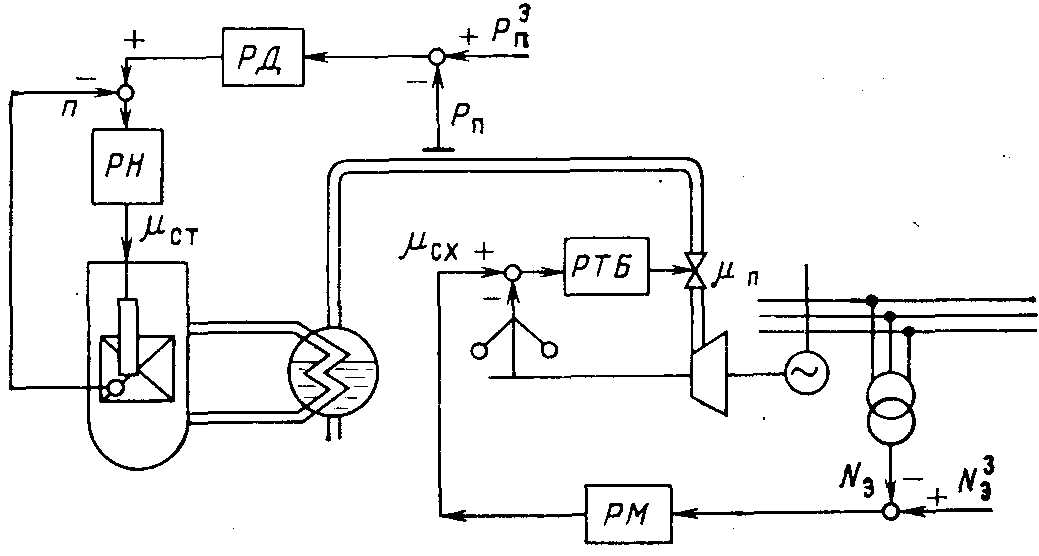
Рис. 1.22
Построение этой схемы ничем не отличается от уже рассмотренной выше схемы управления мощностью энергоблока ТЭС (см. рис. 1.13, в). При появлении отклонения мощности энергоблока N3 от заданного значения Nl регулятор мощности ВМ меняет задание цсх регулятору РТБ, что вызывает соответствующее перемещение клапанов ц.п на линии подвода пара к турбине. Давление пара перед турбиной стабилизируется на заданном значении регулятором РД, который при необходимости меняет задание регулятору РН плотности потока нейтронов п. В свою очередь, этот регулятор соответствующим образом перемещает регулирующие стержни реактора цсх (подобно тому, как в схеме регулирования на рис. 1.13 РД меняет задание регулятору РТ, перемещающему клапан на подводе топлива в топку котла).
Задание регулятору РМ в рассматриваемой системе может быть либо постоянным, либо меняться системным регулятором частоты (подобно тому, как это имеет место в системе на рис. 1.13, в). Однако в настоящее время по некоторым техническим и экономическим соображениям энергоблоки АЭС обычно несут постоянную базовую нагрузку.
В качестве примера конкретных реализаций схем рассмотрим две модификации регуляторов мощности, разработанные ВНИИЭМ для реакторов типа ВВЭР. На рис. 6-3,а показана схема одного канала регулятора АРМ-4, установленного на блоках Кольской, Армянской и некоторых других АЭС. Сигнал давления пара второго контура от манометра 1 поступает в измерительный блок 2, где сравнивается с сигналом заданного давления от задатчика 3. Сигнал разбаланса подается в усилитель 7 непосредственно и через интегратор 4. Кроме того, на усилитель 7 через логарифматор 6 поступает сигнал тока ионизационных камер 5. Наличие сигнала на выходе усилителя 7 вызывает срабатывание релейного блока 8, выход которого при совпадении сигналов величине отклонения, так и интегралу от отклонения (ПИ-закон регулирования). При равенстве действительного давления заданному происходит замыкание ключа 9 и на интегратор 4 подается обратная связь с выхода сумматора 7; двух независимых каналов управляет регулирующими органами реактора через мажоритарную схему. В случае отклонения давления от заданного изменение мощности реактора благодаря наличию интегратора пропорционально как поэтому медленные изменения тока камер компенсируются сигналом интегратора 4, и регулятор реагирует только на быстрые изменения мощности, формируя фактически сигнал по относительной скорости ее нарастания. В случае необходимости ограничения мощности (отключения одного из ГЦН) на усилитель 7 подается дополнительный сигнал от устройства •ограничения мощности 11, при этом переключатель 10 отключает канал регулирования давления, и схема начинает работать как регулятор нейтронного потока, понижая мощность до допустимого уровня.
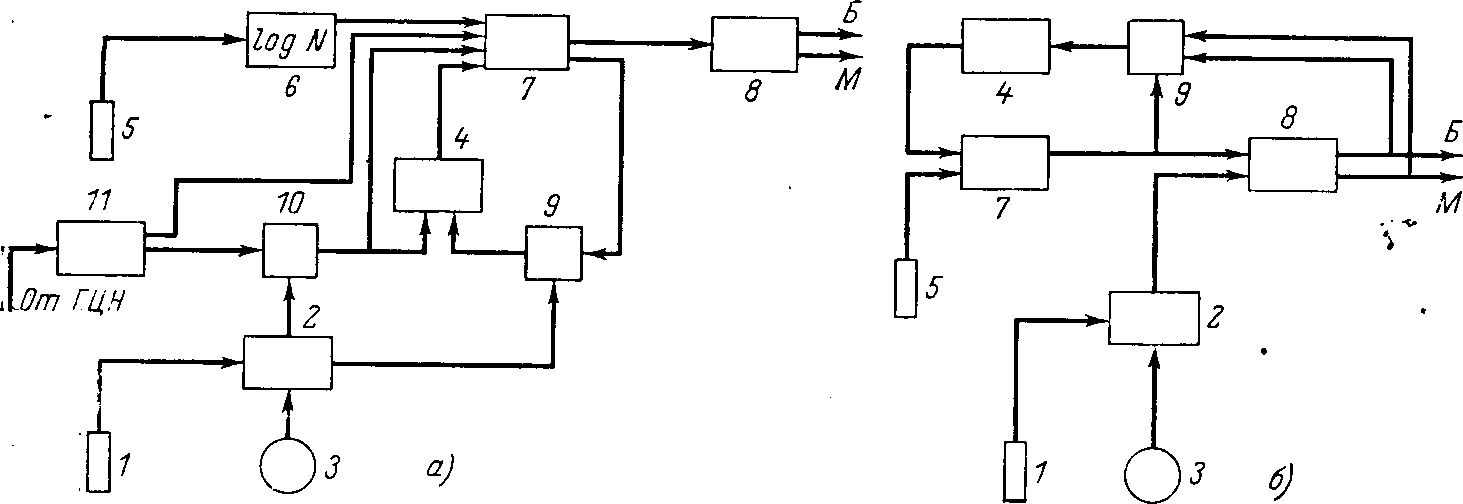
Рис. 6-3. Структурные схемы регуляторов мощности реакторов ВВЭР.
а — регулятор АРМ-4; б — регулятор АРМ-5.
На рис. 6-3,6 показана схема одного канала регулятора АРМ-5, установленного на АЭС Ловииза и намечаемого к установке на ряде других блоков. Сигнал отклонения давления пара второго контура от заданного формируется манометром /, измерительным блоком 2, задатчикам 3 и поступает в релейный блок 8, вырабатывающий сигнал на перемещение регулирующих органов. Одновременно на релейный блок 8 через усилитель 7 поступает сигнал от ионизационной камеры 5. Усилитель 7 охвачен отрицательной обратной связью через интегратор 4 и ключ 9, который размыкается при появлении сигнала («больше» или «меньше») на выходе блока 8. Сигналы с блока 8 вместе с сигналами других каналов поступают на мажоритарную схему. В описываемом регуляторе также приближенно реализуется ПИ-закон регулирования давления за счет введения обратной связи через объект и блоки 7 и 4, выполняющие роль реального дифференциатора. При отсутствии отклонения давления медленный дрейф тока камер, как и в предыдущей схеме, не вызывает срабатывания блока 8. Разгрузка реактора при аварийном отключении ГЦН осуществляется самостоятельным регулятором.
РЕГУЛЯТОРЫ ЧАСТОТЫ ВРАЩЕНИЯ ТУРБИН
Центробежный регулятор частоты вращения.
Регулятор частоты вращения является первичным регулятором турбины. Он автоматически изменяет движущий момент турбины, воздействуя через регулирующий орган на впуск энергоносителя (пара, газа, воды). В качестве регулирующего органа тепловой турбины применяются регулирующие клапаны, а гидротурбины — направляющий аппарат. У поворотно-лопастных гидротурбин два регулирующих органа: направляющий аппарат и лопасти рабочего колеса.
Первоначально, когда электростанции с небольшим количеством генераторов работали на изолированную нагрузку, первичный регулятор имел одно целевое назначение— поддержание в заданных пределах частоты 114
вращения (угловой скорости) турбины и, следовательно, частоты переменного тока при колебаниях нагрузки. В современных энергосистемах первичный регулятор турбины является одним из основных элементов общей системы регулирования режима по частоте и активной мощности. Его целевое назначение расширилось — помимо регулирования частоты он участвует в автоматическом перераспределении активных нагрузок между агрегатами. Старое название «регулятор скорости» используется до настоящего времени.
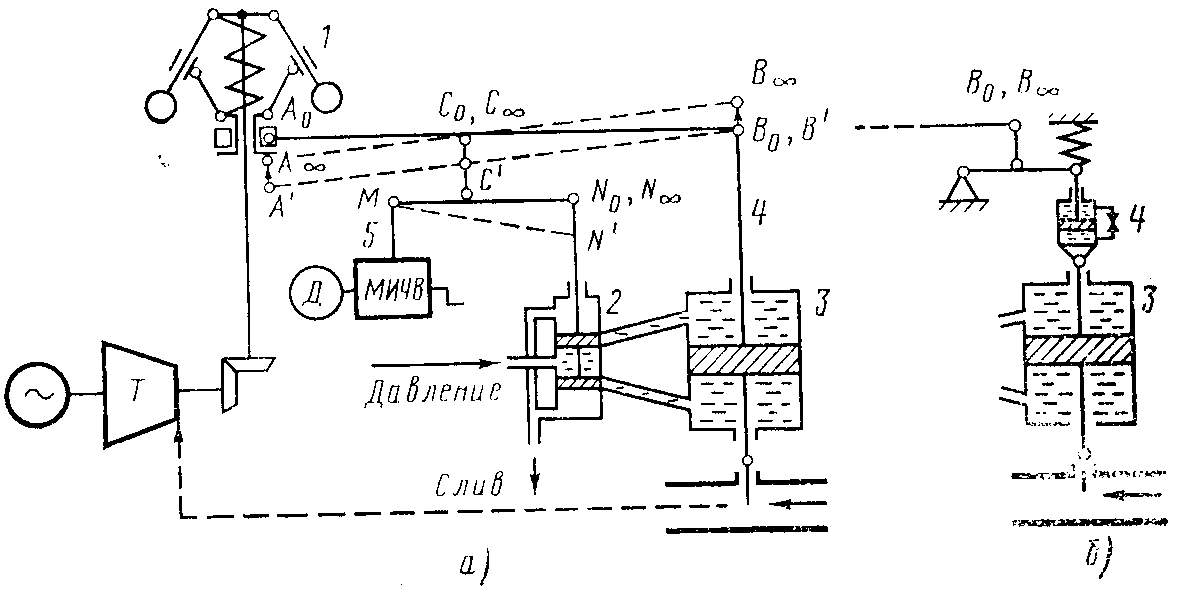
Рис. 2-5. Принципиальная схема центробежного регулятора частоты вращения. а — с жесткой обратной связью; б — с гибкой обратной связью.
Принципиальная схема простейшего центробежного регулятора частоты вращения с жесткой обратной связью показана на рис. 2-5,а. Нумерация функциональных элементов соответствует рис. 2-4.
Регулятор работает следующим образом. При изменении частоты вращения турбины Т, например, в сторону уменьшения центробежный маятник / перемещает муфту из А0 в положение А', а поршень золотникового усилителя 2 из среднего положения вниз. Масло под давлением начинает поступать в нижнюю полость гидравлического исполнительного механизма (ГИМ) 3, а из верхней полости идет на слив. Поршень ГИМ, перемещаясь, воздействует на регулирующий орган турбины, увеличивая впуск энергоносителя. Это регулирующее воздействие способствует увеличению частоты вращения, т. е. перемещению точек А и С рычага АВ из А' и С" вверх. Одновременно на перемещение точки С оказывает влияние перемещение поршня ГИМ благодаря жесткой обратной связи 4. Связь между перемещениями точек , В и С из исходного положения

Регулирование
будет продолжаться до тех пор, пока
поршень золотникового усилителя 2, а
следовательно, и точка С
не
займут вновь нейтральное положение,
при котором окна золотника закрыты, т.
е. в установившемся режиме
![]() Можно принять, что
Можно принять, что
![]() ,
тогда
условие установившегося режима
(закон регулирования агрегата
,
тогда
условие установившегося режима
(закон регулирования агрегата
![]()
где
![]()
- положительный коэффициент статизма.
Если
отключить жесткую обратную связь
![]() ,
то по (2-23)
,
то по (2-23)
![]() однако регулирование будет неустойчивым,
так как поршень золотника будет занимать
нейтральное положение при отсутствии
баланса мощностей турбины и нагрузки.
однако регулирование будет неустойчивым,
так как поршень золотника будет занимать
нейтральное положение при отсутствии
баланса мощностей турбины и нагрузки.
Для смещения характеристики регулирования частоты вращения (зависимости f от активной нагрузки) вдоль оси / служит механизм изменения частоты вращения МИЧВ. Перемещая с помощью МИЧВ точку М вверх (вручную или автоматически с использованием двигателя Д), воздействуют на поршень золотника, перемещая его вниз. Увеличение впуска энергоносителя приведет к увеличению частоты вращения при работе генератора на изолированную нагрузку. При работе генератора в энергосистеме (при неизменной частоте) с помощью МИЧВ можно изменять нагрузку агрегата в пределах его регулировочного диапазона.
Для астатического регулирования частоты применяют вместо жесткой гибкую обратную связь 4 (рис. 2-5,6), состоящую из гидравлического демпфера (цилиндр, заполненный маслом, с поршнем; верхняя и нижняя полости цилиндра сообщаются через трубку с малым регулируемым отверстием) и пружины, образующих так называемое изодромное устройство.
После изменения нагрузки турбины изодромное устройство в начале процесса регулирования ведет себя как жесткая обратная связь (поршень не может быстро переместиться в цилиндре демпфера), чем предотвращается перерегулирование. Затем под действием пружины, стремящейся вернуться в первоначальное недеформированное состояние, поршень постепенно перемещается, вытесняя масло из одной полости демпфера в другую. Процесс регулирования закончится тогда, когда поршень золотника и поршень демпфера займут первоначальное положение, т. е. ∆С=0, ∆В=0, а следовательно, ∆А=0. Последнее свидетельствует о том, что частота вращения турбины вернулась к первоначальному значению.
Гибкая обратная связь может применяться вместе с жесткой обратной связью для улучшения качества процесса регулирования.
Функциональная схема регулятора частоты вращения.
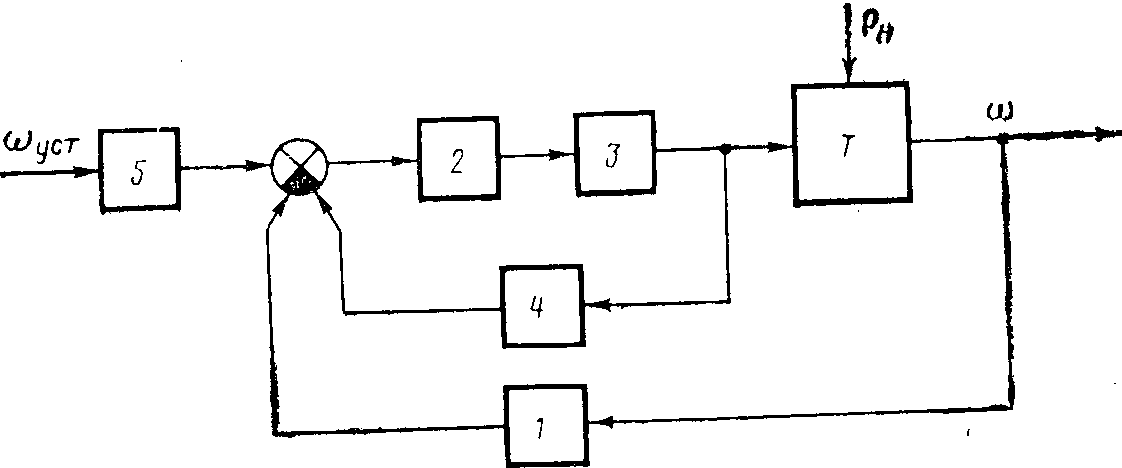
Рис.2-4. Функциональная схема регулятора частоты вращения.
Применяемые в настоящее время регуляторы частоты вращения выполняются как регуляторы косвенного действия с гидравлическими усилителями и, несмотря на существенные конструктивные отличия, имеют одинаковую функциональную схему (рис. 2-4).
Регулятор содержит следующие функциональные
элементы:
измерительное устройство 1—датчик отклонения частоты вращения агрегата от заданного значения, датчик отклонения частоты напряжения, ускорения или других параметров регулирования;
усилительно-преобразовательное устройство 2 — магнитные и гидравлические усилители;
гидравлический исполнительный механизм ГИМ 3, воздействующий через регулирующий орган турбины Т "}ia изменение впуска энергоносителя;
устройство коррекции 4 — жесткая и гибкая обратные связи по положению главного или вспомогательного ГИМ.
задающее устройство 5 — механизм изменения частоты вращения — МИЧВ (иначе — механизм изменения скорости вращения — МИСВ, числа оборотов — МИЧО, механизм регулирования оборотов — МРО, механизм управления турбиной — МУТ).
К вспомогательным устройствам относятся: механизм ограничения открытия направляющего аппарата, механизм управления комбинатором поворотно-лопастной гидротурбины и др.
По роду используемых приборов различают следующие типы регуляторов частоты вращения:
центробежные, использующие в качестве датчика частоты вращения центробежный маятник;
гидродинамические, использующие в качестве датчика частоты вращения центробежный насос, создающий давление масла, зависящее от частоты вращения турбины; центробежные и гидродинамические регуляторы называют гидромеханическими;
электрогидравлические, использующие электрические элементы для построения измерительного устройства, предварительного усилителя, устройства коррекции и задающего устройства.
Система регулирования турбины базируется на ПТК, который именуется электронной частью системы регулирования турбины (ЭЧСР). ЭЧСР турбины предназначена для реализации заданных алгоритмов управления турбиной и формирования управляющих воздействий на устройства управления гидравлической части системы регулирования ЭЧСР.
ЭЧСР может работать в следующих режимах:
режим дистанционного управления механизмами изменения мощности;
режим автоматического регулирования частоты вращения, мощности, давления пара перед турбиной.
Каналы управления ЭЧСР образуют 2 группы:
медленнодействующий контур управления (время запаздывания формирования управляющего воздействия – не более 100мс);
быстродействующий контур управления (время запаздывания формирования управляющего воздействия – не более 20мс).
В медленнодействующем контуре управления реализованы алгоритмы регулирования и контроля:
частоты вращения ротора турбины;
мощности турбины;
давления пара перед турбиной;
положения клапанов греющего пара;
температуры пара после сепаратора-пароперегревателя.
С учетом передаточных функций электродвигателей, являющихся интеграторами, регуляторы реализуют пропорционально- интегральный закон регулирования.
Быстродействующий контур управления реализует алгоритмы, предотвращающие разгон турбины при отключении выключателя генератора, отключении энергоблока от энергосистемы и иных ситуациях, приводящих к резкому снижению нагрузки на турбину.
При штатной работе ЭЧСР может работать в двух основных режимах:
регулирование давления пара перед турбиной;
регулирование мощности.
Первый режим реализуется, если автоматический регулятор мощности реактора (АРМР) находится в режиме “Н”, второй – если он находится в режиме “Т”.
ЭЧСР реализуется на аппаратуре ТПТС 53. Обмен информацией со смежными подсистемами реализуется по системной шине и шине оперативного обмена. Информация, необходимая для СВБУ, передается по системной шине с указанием меток времени.
Конструктивное выполнение центробежных регуляторов для гидравлических и тепловых турбин различно. Для тепловых турбин усилие на выходе регулятора, управляющее клапанами впуска пара, сравнительно небольшое, и его удается обеспечить с помощью одного каскада гидроусилителя. В гидравлических турбинах эти усилия больше, поэтому применяются два и более каскадов гидравлических усилителей.
Регулирование уровня в корпусах реакторов, барабанах-сепараторах и парогенераторах барабанного типа
Система регулирования уровня в парогенераторе hб атомного энергоблока строится по тому же принципу, что и система регулирования в барабане котла (см. рис. 1.17).
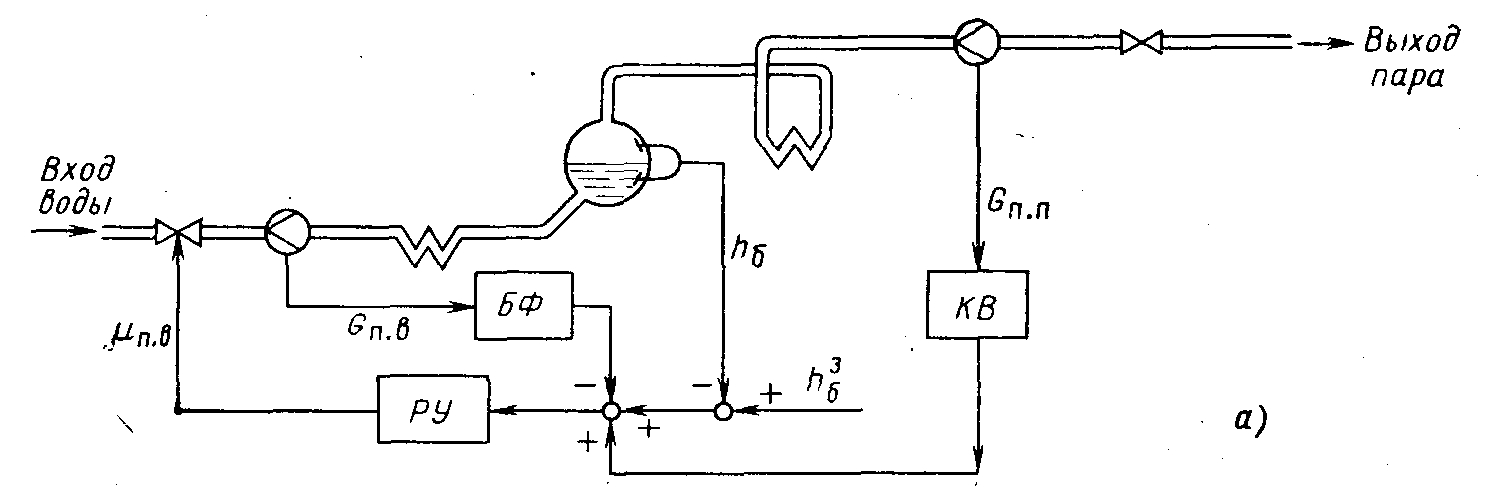
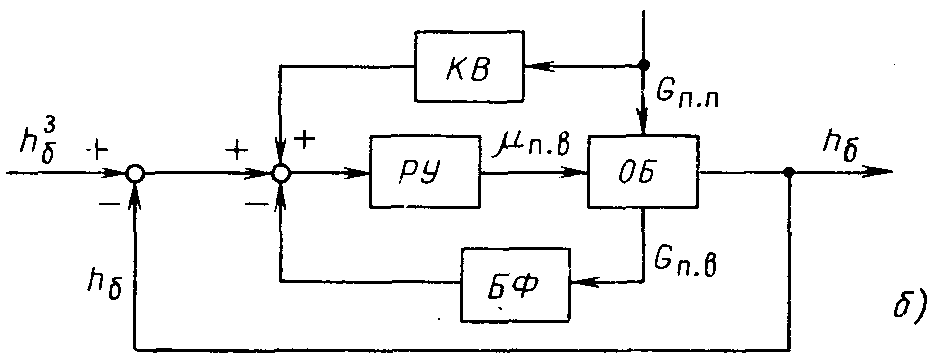
Рис. 1.17
Система регулирования уровня в барабане котла. Применяемая в настоящее время схема регулирования уровня в барабанах котлов приведена на рис. 1 17, а. На вход регулятора уровня РУ подается взвешенная сумма (значения весовых коэффициентов устанавливаются в БФ и KB) сигналов, определяющих текущие значения уровня в барабане hб (0 (основной регулируемой величины), расхода питательной воды Gn.B (г) (вспомогательной переменной состояния) и расхода перегретого пара из котла Gn.n (t) (возмущающего воздействия). Таким образом, информационная структура (рис. 1:17, б) рассмотренной системы регулирования сочетает в себе структуру системы регулирования со вспомогательной переменной состояния (см. рис. 1.6, б) и системы с компенсацией возмущения (см. рис. 1.5). Назначение сигнала от вспомогательной переменной состояния здесь состоит в устранении влияния на уровень в барабане возмущений, идущих со стороны питательного клапана (самопроизвольного изменения расхода питательной воды, обусловленного изменением давления воды в питательной магистрали), назначение сигнала от возмущения — устранить влияние на уровень изменения паровой нагрузки котла.
Для того, чтобы система работала без остаточной неравномерности, весовые коэффициенты БФ и KB подбираются таким образом, чтобы в установившихся режимах, когда GnB = Gn.n, их сигналы взаимно компенсировались.
Необходимость применения сравнительно сложной системы регулирования для такого, казалось бы, очень простого объекта, как барабан котла (ведь подобные функции выполнял уже регулятор Ползунова, показанный на рис. 1.8), обусловлена наличием в современных котлах высокого давления своеобразного эффекта «вскипания» уровня. Сущность этого явления состоит в следующем.
Пусть в какой-то момент времени регулятор турбины открывает клапан подвода пара к турбине, увеличивая расход перегретого пара из котла Gu,n. Это должно было бы привести к падению уровня воды в барабане котла, однако в действительности сначала уровень быстро возрастает («вскипает») и лишь спустя некоторое время начинает меняться в «правильном» направлении (уменьшаться). Объясняется это тем, что в экранных трубах и барабанах котлов высокого давления находится не вода, а пароводяная смесь, объем которой зависит от давления. Увеличение открытия клапана турбины приводит к немедленному падению давления над поверхностью испарения в барабане, объем пароводяной смеси увеличивается, что проявляется во временном увеличении уровня. Аналогичное явление, но в другом направлении происходит при уменьшении степени открытия клапана турбины.
Регулирование давления пара перед турбиной
' Регулирование давления пара осуществляется путем:
изменения расхода пара на турбину;
изменения генерации пара;
сброса пара в конденсаторы и другие сбросные устройства.
Первый способ регулирования может быть применен только при работе турбины на мощную энергосистему (частота которой практически не зависит от мощности, вырабатываемой данной турбиной) и осуществляется путем воздействия регулятора давления на синхронизатор турбины.
. Действительно, если, например, увеличивается частота сети, регулятор частоты вращения турбины прикрывает регулирующие клапаны, вызывая тем самым уменьшение расхода пара на турбину и ее мощности. Отсутствие баланса между генерацией пара и его потреблением приведет к увеличению давления пара перед турбиной, что заставит регулятор давления перемещать синхронизатор турбины в сторону, соответствующую открытию клапанов, возвращая расход пара и мощность турбины к прежнему значению, но уже при новой частоте. С другой стороны, например, при увеличении мощности реактора, а следовательно, и генерации пара будет происходить повышение давления, и регулятор давления будет с помощью синхронизатора открывать клапаны турбины при той же частоте системы.
Схема с воздействием регулятора давления на синхронизатор турбины применяется на станциях, работающих как в базисном так и в регулирующем режимах. В последнем случае задание регулятору мощности реактора должно меняться, в зависимости от частоты сети и требуемой мощности блока.
Другим способом поддержания давления, применимым только в регулирующем режиме работы блока, является воздействие регулятора давления на задатчик мощности (или непосредственно на регулирующие органы) реактора. В этом случае изменение частоты сети и связанное с ним перемещение регулирующих клапанов также приводят к изменению давления, но регулятор меняет не потребление, а генерацию пара, приводя ее к новому значению, требуемому турбиной.
Регулирование давления путем сброса пара в специальные пароприемные устройства является наиболее быстродействующим способом и широко применяется на АЭС в аварийных ситуациях (срабатывание стопорных клапанов одной из турбин, отключение турбогенераторов блока от сети). Обычно предусматривается несколько устройств, принимающих пар в этих режимах (конденсаторы турбин, технологические конденсаторы, барботеры), кроме того, возможен сброс пара в атмосферу. Нормально клапаны, управляющие сбросом пара, закрыты и открываются либо при появлении сигнала об аварийной ситуации, либо при повышении давления перед турбиной. С помощью этого метода можно отрабатывать возмущения, связанные лишь со снижением потребления пара. Для отработки возмущений, связанных с увеличением потребления пара при постоянной мощности реактора, необходимо иметь постоянный сброс пара, уменьшая который можно добиться быстрого увеличения мощности турбины. Из-за своей очевидной неэкономичности этот способ не нашел широкого применения на АЭС и может быть рекомендован лишь в исключительных случаях, например если в связи с необходимостью регулирования частоты системы к мобильности АЭС предъявляются дополнительные требования, превосходящие возможности реактора.
Одним из способов построения системы регулирования давления сбросом пара является установка нескольких астатических регуляторов, каждый из которых управляет своим клапаном, изменяющим сброс в одно из пароприемных устройств. Заданное значение давления этих регуляторов должно быть выше значения, поддерживаемого основным регулятором, с тем, чтобы при нормальной работе клапаны сброса были бы закрыты. Если существует несколько устройств, которые должны включаться в определенной последовательности, уставки управляющих ими регуляторов различаются (регуляторы, включающиеся раньше, имеют более низкое заданное значение давления). Разность между уставками должна быть такой, чтобы их последовательность сохранялась при возможных погрешностях датчиков и регуляторов (1,5— 3,0 кгс/см2). При большом уменьшении нагрузки сначала будет работать основной регулятор; в случае, если повышение давления достигнет уставки первого регулятора сброса (например, в конденсатор турбины), он включится в работу. Дальнейшее повышение давления вызовет срабатывание второго регулятора сброса (например, в барботер). Если не считать начального периода, сброс пара через клапан второго регулятора будет происходить только в том случае, если полностью открытый клапан первого регулятора не может пропустить всего необходимого расхода. Недостатками такой схемы могут считаться относительно высокая уставка срабатывания последующих регуляторов и некоторая задержка в открытии сбросных клапанов, так как они начинают открываться только после того, как давление поднимается на значительную величину спустя некоторое время после сброса нагрузки.
Цифровые регуляторы, входящие в состав СЦАР, обеспечивают поддержание регулируемых параметров в заданных пределах и с заданной степенью точности (в соответствии с техническими требованиями к алгоритмическому обеспечению СЦАР) с учетом сложной обратной связи регуляторов, в состав которой входят влияющие на объект регулирования другие технологические параметры, не являющиеся регулируемыми.
Объектами регулирования СЦАР являются технологические системы, оборудование в объеме машзала турбоустановки К-1000-60/1500-2.
К таким объектам относятся:
- собственно турбоустановка (ЭГСР - регулирование частоты вращения и мощности турбоустановки, СЦАР давления пара в концевых уплотнениях ЦВД и ЦНД);
- паропроводы свежего пара (СЦАР предтолчкового прогрева паропроводов и СРК - регулирование скорости прогрева металла трубопроводов свежего пара и СРК турбоустановки);
- сепараторы - пароперегреватели (СЦАР прогрева СПП - регулирование скорости прогрева металла СПП, давления греющего пара на вторую ступень СПП, температуры пара в ресиверах за СПП);
- оборудование БРУ-К (СЦАР давления пара в ГПК - регулирование давления пара в ГПК при пуске и останове энергоблока, программное изменение давление пара в ГПК при разогреве и расхолаживании энергоблока, предотвращение повышения давления пара в ГПК за допустимые пределы при сбросах нагрузки турбины);
- система паропроводов собственных нужд (СЦАР давления пара в КСН и питания ТПН, СЦАР давления пара в деаэраторах турбины);
- тракт основного конденсата (регулирование уровня конденсата в конденсаторах турбины, регулирование уровней конденсата в деаэраторных баках, регулирование давления конденсата на напоре КЭН 2-ой ступени);
- турбопитательные насосы (СЦАР разворота, частоты вращения, производительности и максимального расхода ТПН);
- система питательной воды (СЦАР уровней ПВ в парогенераторах);
- подогреватели высокого давления (СЦАР прогрева и уровней КГП в ПВД);
- подогреватели низкого давления (СЦАР уровней КГП в ПНД-1,3,4);
- конденсатосборники СПП (СЦАР уровней КГП в конденсатосборниках первой и второй ступеней СПП);
- сепаратосборники СПП (СЦАР уровней сепарата в сепаратосборниках СПП).
3.4. Устройства и работа системы автоматического регулирования
Реализация систем регулирования технологическими параметрами в соответствии с данной структурной схемой обеспечивает регулирование «до себя» и «после себя» для статических и астатических объектов регулирования по П-. ПИ-. ПИД- законам управления с учетом охвата исполнительного механизма отрицательной обратной связью.
Структурная схема регуляторов, реализуемых с помощью системы автоматического регулирования турбинного отделения, приведена на структурной схеме, приведенной на рисунке. Схема является унифицированной для всех систем цифрового авторегулирования.
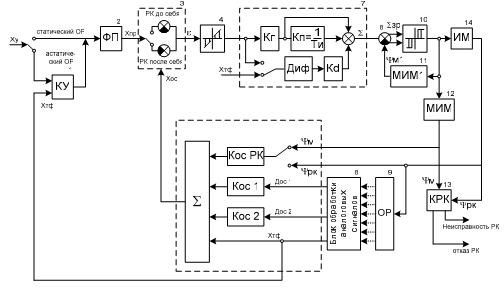
Рис. 3.4.1 – Структурная схема регулятора
На структурной схеме обозначены:
1 - корректор уставки (КУ);
2 - формирователь программы (ФП);
3, 8 - формирователи рассогласования;
4 - формирователь зоны нечувствительности;
5 - формирователь обратной связи;
6 - блок обработки аналоговых сигналов;
7 - формирователь закона регулирования;
9 - объект регулирования;
10 - релейный элемент;
11, 12 - модели исполнительного механизма;
13 - блок контроля регулирующего клапана;
14 - исполнительный механизм
Корректор уставки (1) входит в состав регулятора, воздействующего на
астатический объект, и обеспечивает автоматическую компенсацию статической ошибки регулирования.
Формирователь программы (2) обеспечивает безударное включение
регулятора и осуществляет изменение программного значения до уровня уставки.
В зависимости от способа регулирования («до себя» или «после себя») в блоке (3)
определяется рассогласование между программным значением Хпр и величиной обратной связи регулятора Хос. Положительное рассогласование вызывает формирование положительной П – части, увеличение интегральной составляющей и выдачу команд на открытие регулирующего клапана.
Отрицательное рассогласование вызывает формирование отрицательной П –
части, уменьшение интегральной составляющей и формирование команд на
закрытие регулирующего клапана.
Формирователь зоны нечувствительности (4) блокирует выдачу команд
управления на регулирующий орган при величине рассогласования, не
превышающей величины зоны возврата.
Формирователь обратной связи (5) в зависимости от типа объекта
регулирования обеспечивает формирование сложной обратной связи,
учитывающей величину регулируемого параметра, положение регулирующего
клапана и корректирующие параметры, что дает возможность построить
одноимпульсную, двухимпульсную и трехимпульсную схемы регулирования.
Наличие составляющих в обратной связи определяется ненулевыми
значениями коэффициентов при том или ином параметре, входящим в обратную
связь.
Для астатических объектов с целью повышения устойчивости работы
регулятора в обратную связь вводится сигнал от датчика положения
регулирующего клапана, который в случае его неисправности автоматически
безударно заменяется моделируемым системой значением положения клапана.
Сигналы, поступающие от объекта регулирования (9) и обеспечивающие
формирование обратной связи, могут проходить через блок обработки аналоговых
сигналов (6), обеспечивающий их дополнительную фильтрацию.
Формирователь (7) обеспечивает формирование суммарного управляющего воздействия в соответствии с П-, ПИ-, ПИД- законами регулирования. Выбор закона регулирования осуществляется путем задания ненулевого коэффициентов при той или иной его составляющей. Причем дифференциальная составляющая может формироваться либо по текущему значению регулируемого параметра, либо по величине рассогласования.
Формирователь рассогласования (8), релейный элемент (10), а также модель
исполнительного механизма (11) осуществляют преобразование суммарного управляющего воздействия в импульсную последовательность, поступающую на
исполнительный механизм (14).
Исполнительный механизм включается и перемещается с постоянной
скоростью в сторону ликвидации рассогласования при:
ЗНЗР M > − ∑ 1 ψ
где:
ЗНЗР - значение зоны нечувствительности.
Перемещение исполнительного механизма передается в виде сигнала
обратной связи ψм1, уменьшая результирующий сигнал Σзр=Σ-ψм1,
воздействующий на релейный элемент (10).
При |Σзр| < ЗВЗР, где ЗВЗР - значение зоны возврата, исполнительный
механизм отключается. Таким образом, при каждом изменении суммарного
управляющего воздействия |Σ| > ЗНЗР исполнительный механизм перемещается,
ликвидируя с точностью |Σзр| < ЗВЗР отклонение от заданного значения.
Модели исполнительного механизма (11 и 12) представляют собой
интегральные звенья, на входы которых поступают те же управляющие сигналы,
что и на исполнительный механизм (14). Изменение положения моделей
производится с постоянной скоростью, равной скорости перемещения реального
клапана при наличии команд на его открытие или закрытие. Кроме того, модели
ψм1 и ψм исполнительного механизма (14) учитывают его люфты, возникающие при смене направления выдачи команд.
Модель (11) исполнительного механизма, как указывалось выше, входит в узел формирования серии импульсов на исполнительный механизм (14) и
обеспечивает при нулевом рассогласовании компенсацию интегральной
составляющей закона регулирования. Диапазон изменения выходного сигнала ψм1
модели (11) - от минус 90 до 90 %. При включении регулятора с целью
обеспечения безударности модели (11) и интегральной составляющей закона
регулирования присваивается нулевое значение.
Модель (12) позволяет обеспечить контроль работоспособности
регулирующего клапана путем сравнения сигналов от реального датчика
положения клапана и модели.
Диапазон изменения выходного сигнала ψм модели (12) от 0 до 100 %. При
включении регулятора модели (12) присваивается значение положения
регулирующего клапана.
Блок контроля (13) осуществляет контроль исправности регулирующего
клапана путем сравнения моделируемого положения ψм и показаний реального датчика положения ψРК, а также анализа сигналов от концевых выключателей.
Сигнал «Неисправность РК» формируется в следующих случаях:
1) при расхождении показаний ψм и ψРК на величину больше допустимой;
2) при несоответствии сигналов от концевых выключателей и ψРК;
3) при скачкообразном изменении ψРК на величину больше допустимой.
При отсутствии сигналов от концевых выключателей формируется сигнал
«Отказ РК» (отсутствие питания регулирующего клапана).