

3.4.3. Последовательностные детерминированные модели
В отличие от комбинационных моделей при составлении последовательностных моделей необходимо отражать однозначное соответствие состояний выходов комбинациям состояний входов как в данном такте, так и в предыдущих. Следовательно, одна и та же комбинация входов в данном такте может вызвать переход в разные новые состояния в зависимости от того, каким было предшествующее состояние. Поэтому в модели должны быть отражены не только данный такт, но и предыстория.
В зависимости от сложности объекта используются различные виды моделей. В простейшем случае применяются циклограммы, в которых состояния отражают условным изображением включенного или отключенного исполнительного элемента в виде наличия или отсутствия линии. При большом числе состояний применяются таблицы состояний и графы. Более конкретно методика составления моделей изложена на примерах.
Циклограмма. Она представляет собой ряд горизонтальных строк, равных числу командных и исполнительных элементов. Строки условно разбиты на отрезки, число которых равно числу элементарных технологических тактов. Включенное состояние элемента на строке обозначается сплошной линией, отключенное — отсутствием ее. Вертикальными линиями на циклограммах показана "передача управления" -причинно-следственные связи между командными и исполнительными элементами.
Когда элемент включен, совокупность тактов называется периодом включения, а когда отключен - периодом отключения. Такт, предшествующий периоду включения, называется включающим, а периоду отключения — отключающим.
Пример 3.8. Рассмотрим циклограмму работы грузового подъемника (рис. 3.8). Грузовой подъемник с тележкой от подачи кратковременной команды кнопкой SB (пуск) идет вверх [кнопка SB включает контактор "Вперед" КМ1 (SB -> КМ1), после чего отключается (такт 1)1. В начале движения отключается нижний конечный выключатель SQ2 (такт 2). После достижения крайнего верхнего положения кабина воздействует на верхний конечный выключатель SQ1, который дает команду на отключение КМ1 (такт 3,SQ1 -+КМ1). Контактор КМ1 отключается (такт 4). После выката тележки отключается конечный выключатель SQ3 (такт 5) и включается контактор "Назад" КМ2, подъемник идет вниз (такт 6, SQ3 -»■ КМ2), отключается SQ1 (такт 7). После воздействия внизу на нижний конечный выключатель SQ2 отключается КМ2 (такт 8, SQ2 -> КМ2), кабина останавливается (такт 9).
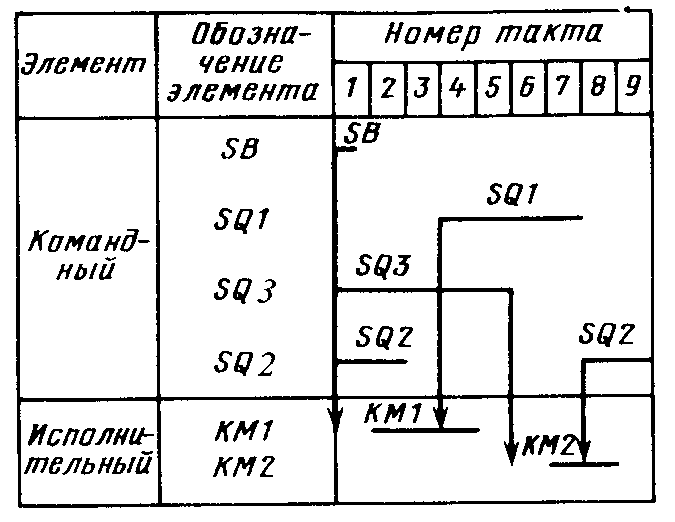
Рис. 3.8. Циклограмма работы грузового подъемника
4.3.1. Элементы теории дискретных автоматизированных устройств
Под дискретным автоматизированным устройством понимают управляющее устройство, осуществляющее переработку априорной и текущей информации в управляющую, причем носителями всех перечисленных составляющих информации являются дискретные по уровню и во времени сигналы. Это означает, что состояние сигнала каждого входа (выхода) автоматизированного устройства характеризуется двумя уровнями: минимальным, условно обозначаемым 0, и максимальным, обозначаемым I. При наличии нескольких входов (выходов) комбинацию минимальных и максимальных (нулевых и единичных) уровней можно воспринимать двояко:
как наличие или отсутствие на каждом входе (выходе) задающего или командного сигнала, поступающего на какой-либо исполнительный элемент;
как кодовую комбинацию, обозначающую, например, двоичное число, количество разрядов п которого равно количеству входов (выходов). Следовательно, можно говорить о многоуровневом выходном сигнале с числом уровней N=2".
В первом случае дискретное логическое автоматизированное устройство решает задачи логического анализа ситуации, определяемой рядом действующих или отсутствующих факторов, во втором — арифметическое устройство, осуществляет преобразование информации путем выполнения арифметических операций над числами.
Как логические, так и арифметические устройства реализуются применением ограниченного числа типовых элементарных операций над дискретными сигналами и сходных методов синтеза и анализа.
Дискретизация по времени означает, что в течение конечного интервала времени f;-, именуемого тактом, состояние сигнала либо их комбинация остаются неизменными. Пронумерованная последовательность таких тактов образует автоматное время.
Дискретные управляющие устройства в соответствии с требованиями технологического цикла (см. § 2.3) бывают комбинационными и последовательностными. Первые характерны тем, что комбинация состояний выходных сигналов Укг- в данном такте ti однозначно определяется комбинацией входных сигналов X, в этом же такте времени, т.е.
![]()
где X — оператор (алгоритм) преобразования.
Комбинационные автоматы называют также автоматами с нулевой памятью.
У последовательностных автоматов комбинация состояний выходов в такте tj зависит не только от комбинации состояний входов в данном такте, но и от того, какими были комбинации состояний входов в п предыдущих тактах, т.е.
![]()
Их называют также автоматами с ненулевой памятью, так как для выработки своих выходных (управляющих) сигналов они должны не только "знать", что сейчас (в данном такте) происходит на входе, но и "помнить", что было раньше.
Переключательной функцией (ПФ) называют переменную, значения которой зависят от значений других двоичных переменных—аргументов. Переключательная функция задается в виде соответствия ее значения каждому набору (комбинации) значений ее аргументов. Переключательные функции считаются разными, если отличаются значениями хотя бы для одного набора.
При п аргументах число наборов N = 2", а число переключательных функций
М = 2N = 22".
По характеру реакции на входное воздействие различают асинхронные автоматы, у которых изменение состояния выходов происходит сразу после изменения входных, и синхронные, у которых изменение выходов происходит лишь в том случае, если после изменения входных сигналов поступит синхронизирующий сигнал, разрешающий преобразование.
Для создания самого сложного дискретного автомата любого типа достаточно иметь элементы, реализующие операцию ИЛИ—НЕ (инверсия дизъюнкциии или операция Пирса) либо операцию И—НЕ (инверсия конъюнкции или операция Шеффера), т.е. так называемый функционально полный набор.
Последовательностные автоматы отличаются от комбинационных также наличием обратных связей, по которым на входы автомата подаются сигналы, соответствующие состоянию выходов в предыдущем такте.
Ниже рассмотрены достаточно обобщенные методы анализа и синтеза дискретных автоматов с использованием элементов минимальной и средней степеней интеграции.
Основные этапы синтеза дискретного автомата следующие:
1) составление задания на разработку в виде содержательного описания, где формулируются требования управляемого объекта к автомату, т.е. описания, на какой исполнительный элемент объекта и в каком такте должен быть подан минимальный (0) или максимальный (1) уровень сигнала данного выхода автомата, чтобы с учетом состояния задающих входов и выходов, воспринимающих сигналы обратных связей, обеспечить требуемое функционирование управляемого объекта;
2) получение формальной модели автомата на основе содержательного описания в виде таблиц, графов, матриц и т.п. (см. § 3.4) ;
3) получение на основе модели объекта исходной или минимальной формы аналитического представления оператора преобразования, реализуемого автоматом и обеспечивающего требуемый закон функционирования управляемого объекта. Эта часть синтеза является основной и базируется на аксиомах и постулатах Булевой (двоичной) алгебры;
4) разработка принципиальной схемы автомата на основе полученной в п. 3 его формальной модели и используемой конкретной элементной базы;
5) разработка и согласование узлов связи автомата с оператором и управляемым объектом, защита от помех и т.п.
РЕАЛИЗАЦИЯ ЛОГИЧЕСКИХ ФУНКЦИИ
Каждое устройство, состоящее из соединенных между собой катушек реле и контактов1 (контактов реле, кнопок, датчиков), можно описать с помощью булевых функций2 и, наоборот, любую логическую функцию можно реализовать с помощью схемы, состоящей из соединенных между собой катушек и контактов реле. Обычно при записи функций катушки реле обозначаются большими буквами, а контакты — маленькими. Включенное состояние реле (контакта реле) записывается как Р=1 (р=1), отключенное состояние реле (контакта реле)—Р=0 (р=0). Для простейшей схемы, изображенной на рис. 2-3,а, можно записать:
Р=1, если а=\, и Р=0, если а=0, или Р—а.
В схеме рис. 2-3,6 реле Р включено, когда отключено реле А, или
Р=а.
На схеме рис. 2-3,0 реле Р включено, если включены оба реле А и В:
P=ab,
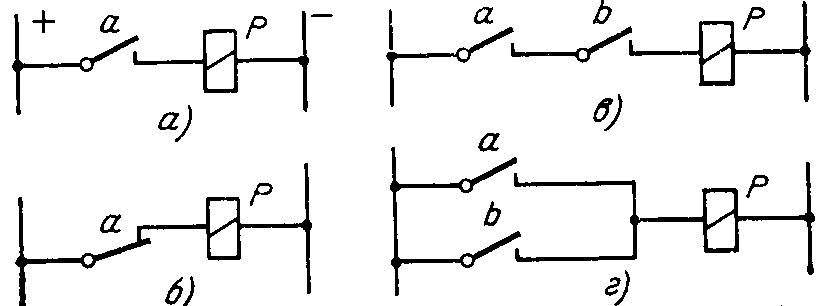
Рис. 2-3. Реализация основных логических функций.
![]()
а на схеме 2-3,г реле Р включено, если включено хотя бы одно реле А или В:
Р = а\/Ь.
Отсюда вытекают общие правила: последовательному соединению контактов соответствует конъюнкция, параллельному — дизъюнкция, а нормально замкнутый контакт в схеме соответствует отрицанию Следуя этим правилам, легко выразить функцию, реализованную схемой на рис. 2-4,а:
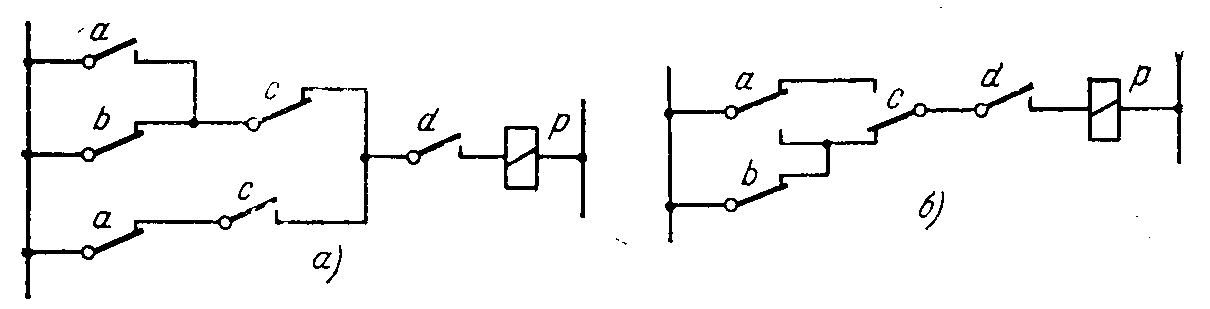
Рис.
2-4.
Схемы,
реализующие функцию
![]()
Построение контактной схемы, соответствующей аналитическому выражению логической функции, также не представляет трудности.
В целях уменьшения числа контактных пружин можно соединять контакты одного и того же реле, имеющие общую точку: замыкающий и размыкающий контакты заменить одним переключающим (рис. 2-4,6).