

5.Особенности реализации пид-регуляторов
ПИД-регулятор и его модификации являются теоретическими идеализациями реальных регуляторов, поэтому для их практического воплощения необходимо учесть особенности, порождаемые реальными условиями применения и технической реализации. К таким особенностям относятся:
1.конечный динамический диапазон изменений физических переменных в системе (ограниченная мощность нагревателя)
2.ограниченная точность измерений, что требует специальных мер для выполнения операций дифференцирования с приемлемой погрешностью;
3.наличие практически во всех системах типовых нелинейностей: насыщение, ограничение скорости нарастания, гистерезис и люфт;
4.технологический разброс и случайные вариации параметров регулятора и объекта;
5.дискретная реализация регулятора;
6.необходимость плавного (безударного) переключение режимов регулирования.
Методы решения перечисленных проблем:
1.Погрешность дифференцирования и шум
Суть проблемы заключается в том, что производная вычисляется обычно как разность двух близких по величине значений функции, поэтому относительная погрешность производной всегда оказывается больше, чем относительная погрешность численного представления дифференцируемой функции.
В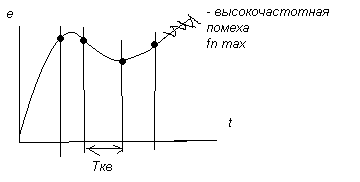 частности, если на вход дифференциатора
поступает синусоидальный сигнал
Asin(wt),
то на выходе получим Acos(wt),
т.е. с ростом частоты и увеличивается
амплитуда сигнала на выходе дифференциатора.
Иначе говоря, дифференциатор усиливает
высокочастотные помехи, короткие
выбросы и шум. Если помехи, усиленные
дифференциатором, лежат за границей
рабочих частот ПИД-регулятора, то
их можно ослабить с помощью фильтра
верхних частот.
частности, если на вход дифференциатора
поступает синусоидальный сигнал
Asin(wt),
то на выходе получим Acos(wt),
т.е. с ростом частоты и увеличивается
амплитуда сигнала на выходе дифференциатора.
Иначе говоря, дифференциатор усиливает
высокочастотные помехи, короткие
выбросы и шум. Если помехи, усиленные
дифференциатором, лежат за границей
рабочих частот ПИД-регулятора, то
их можно ослабить с помощью фильтра
верхних частот.
Кроме шумов дифференцирования, на характеристики ПИД-регулятора влияют шумы измерений. Через цепь обратной связи эти шумы поступают на вход системы и затем проявляются как дисперсия управляющей переменной и. Высокочастотные шумы вредны тем, что вызывают ускоренный износ трубопроводной арматуры и электродвигателей.
2.Погрешности интегрирования
Интегральное насыщение возникает в процессе выхода системы на режим в регуляторах с ненулевой постоянной интегрирования Ти ≠0. Интегральное насыщение приводит к затягиванию переходного процесса.
Аналогичный эффект возникает вследствие ограничения пропорционального и интегрального члена ПИД-регулятора
Суть проблемы интегрального насыщения состоит в том, что если сигнал на входе объекта управления u(t) вошел в зону насыщения (ограничения), а сигнал рассогласования r(t) – y(t) не равен нулю, интегратор продолжает интегрировать, т.е. сигнал на его выходе растет, но этот сигнал не участвует в процессе регулирования и не воздействует на объект вследствие эффекта насыщения.

W1-верхнее насыщение; w2-нижнее
3.Безударное переключение режима
Может возникнуть такая ситуация, когда в работающей системе потребовалось после ручного управления системой перейти на автоматический режим. Могут появиться нежелательные выбросы регулируемой величины, если не принять специальных мер. Поэтому возникает задача плавного («безударного») переключения режимов работы или параметров регулятора.
Основной метод решения проблемы заключается в построении такой структуры регулятора, когда изменение параметра выполнятся до этапа интегрирования.