

33. Системы программирования на языках мэк 61131-3.
Стандарт МЭК 61131-3 устанавливает 5 языков программирования ПЛК: 3 графических и 2 текстовых. Первоначально стандарт назывался IEС 1131-3 в 1993г, а в 1997г. - 61131-3.
Основной целью создания стандарта было повышение скорости и качества разработки программ для ПЛК, а также создание языков программирования, ориентированных на технологов, обеспечение соответствия ПЛК идеологии открытых систем, исключение этапа дополнительного обучения при смене типа ПЛК. Процесс программирования для ПЛК доступен даже не для программистов.
Стандарт устанавливает 5 языков:
1.Структурированный текст (ST-Structured Text)
2.Последовательные функциональные схемы (SFC-Sequential Function Chart)
3.Диаграмма функциональных блоков (FBD –Function Block Diagram)
4.Релейно-контектные схемы (LD-Ladder Diagram)
5.Список инструкций (IL- Instruction List)
Графические языки – SFC, FBD, LD, а IL, ST- текстовые.
Языки базируются на следующих принципах:
1.Вся программа разбивается на множество функциональных элементов, каждый из которых может состоять из функций, функциональных блоков и программ. Любой элемент программы может быть сконструирован иерархически из более простых элементов.
2.строгая типизация данных. Работает с данными четко определенной структуры.
3. имеются средства для использования разных фрагментов программы в разное время, с разной скоростью, а также параллельно. При управлении сложным объектом если несколько контуров управления.
4. выполнение операций в определенной последовательности, которая задается моментами времени или событиями, используется для этого язык SFC.
5. стандарт поддерживает структуры для описания разнообразных данных. (Пр. температура подшибников насоса, давление)
6. Совместное использование всех 5 языков
7. Переносимость программы. Программа написанная для одного контроллера, может быть перенесена на любой контроллер, совместимый со стандартом МЭК 61131-3.
34. Программирование на языках мэк 61131-3: язык релейно-контактных схем.
Релейно-контактные
схемы (LD-Ladder
Diagram)-появился
в виде электрических схем, которые
состояли из контактов и обмоток,
электромагнитных реле. Схемы использовались
в автоматике конвееров для сборки
автомобилей до эры микропроцессоров.
Язык легко понятен, наиболее распространен
в промышленной автоматике. Но его
проблематично использовать в сложных
алгоритмах, т.к он не поддерживает
подпрограммы, функции и другие средства
структурирования программ.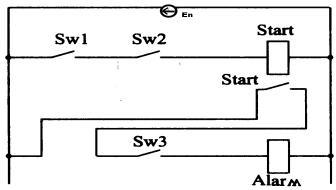
При срабатывании реле Start замыкаются его контакты и включается устройство (электродвигатель).
![]()
![]()
Нормально
разомкнутый контакт
![]() ,
Нормально замкнутый контакт
,
Нормально замкнутый контакт
![]() ,
Обмотка реле
,
Обмотка реле
![]()
True 1, False 0
Обмотка делится на 2 группы:
1.срабатывают при протекании тока
2.инверсная
обмотка
![]()
Соответствует
RS-тригеру
![]()
![]() устанавливает
логическую переменную «1»
устанавливает
логическую переменную «1»
![]() сбрысывает
логическую переменную в «0»
сбрысывает
логическую переменную в «0»
![]()
x {0,1}
y {0,1}
z{0,1}
z=x AND y - последовательное соединение контактов
Токи текут от левой шины питания к правой, все процессы начинаются слева. Делится на 2 области:
1.область проверки
2. области действия
Схема разбивается на ступени.
Ступень 1 |
Ступень 2 |
….. |
Применяются более сложные блоки
![]() блоки
типа таймер, счетчик, вибратор, регистр.
блоки
типа таймер, счетчик, вибратор, регистр.
![]() блок сравнения,
блок сравнения,
Все
остальные блоки в
![]()