

19. Интерфейсы «токовая петля».
Позволяет определить исправна ли линия связи, в передатчике используется не источник напряжение (как в RS-485), а тока.
Разновидности: 0…60мА – 1950 г
0…20мА – 1962 г
4…20мА – 1980 г

По определению, ток, вытекающий из источника тока, не зависит от параметров нагрузки. Поэтому в «токовой петле» протекает ток, не зависящий от сопротивления кабеля Rкаб, сопротивления нагрузки Rн, и э.д.с. индуктивной помехи ЕИНД, Ток в петле может измениться только вследствие утечек кабеля, которые очень малы.
Это свойство токовой петли является основным и определяет все варианты ее применения.
В качестве линии передачи обычно используется экранированная витая пара, которая совместно с дифференциальным приемником позволяет ослабить индуктивную и синфазную помеху.
На приемном конце ток петли преобразуется в напряжение с помощью калиброванного сопротивления Rн. Основным недостатком «токовой петли» является ее принципиально низкое быстродействие, которое ограничивается скоростью заряда емкости кабеля Скаб от источника тока. Вторым недостатком «токовой петли», ограничивающим ее практическое применение, является отсутствие стандарта на конструктивное исполнение разъемов и электрические параметры, хотя фактически стали общепринятыми диапазоны токовых сигналов 0...20 и 4...20 мА; гораздо реже используют 0...60 мА.
Интерфейс «токовая петля» распространен в двух версиях: цифровой и аналоговой.
Аналоговая «токовая петля». Аналоговая версия «токовой петли» используется, как правило, для передачи сигналов от разнообразных датчиков к контроллеру или от контроллера к исполнительным устройствам. Применение «токовой петли» в данном случае дает два преимущества. Во-первых, приведение диапазона изменения измеряемой величины к стандартному диапазону обеспечивает взаимозаменяемость компонентов. Во-вторых, становится возможным передать сигнал на большое расстояние с высокой точностью.
В варианте «4...20 мА» в качестве начала отсчета принят ток 4 мА. Это позволяет производить диагностику целостности кабеля (кабель имеет разрыв, если ток равен нулю) в отличие от варианта «0...20 мА», где величина 0 мА может означать не только нулевую величину сигнала, но и обрыв кабеля. Вторым преимуществом уровня отсчета 4 мА является возможность подачи энергии датчику для его питания.
В схемах используется гальваническая развязка между входом передатчика и передающим каскадом. Она необходима для исключения паразитных связей между передатчиком и приемником
Цифровая «токовая петля»
![]()
Пропорциональность необязательна, главное, чтобы амплитуда тока не выходила за пределы.
Оптрон- преобразователь электрического сигнала в свет, его передаче по оптическому каналу и последующем преобразовании обратно в электрический сигнал.
20. Промышленная сеть Profibus.
Слово PROFIBUS получено из сокращений PROcess Field BUS-«промышленная шина для технологических процессов. Стандарт Profibus был первоначально принят в Германии в 1987 г., в 1996 г. он стал международным (ЕN 50170 и ЕN 50254).
Profibus имеет три модификации: Profibus DP, Profibus FMS h Profibus PA.
Profibus DP (Profibus for Decentralized Peripherals — Profibus для децентрализованной периферии) использует уровни 1 и 2 модели ОSI, а также пользовательский интерфейс, который в модель ОSI не входит.
Profibus FMS (Profibus c FMS -протоколом) использует уровень 7 модели ОSI и применяется для обмена данными с контроллерами и компьютерами на регистровом уровне. Profibus FMS предоставляет большую гибкость при передаче больших объемов данных, но проигрывает протоколу DP в популярности своей сложности.
Profibus PA (Profibus for Process Automation — для автоматизации технологических процессов) использует физический уровень на основе стандарта IЕС 1158-2, который обеспечивает питание сетевых устройств через шину и не совместим с RS-485. Особенностью Profibus PA является возможность работы во взрывоопасной зоне.
Profibus является многомастерной сетью (с несколькими ведущими устройствами). Физический уровень На физическом уровне Profibus DP используют стандарт RS-485 при скорости передачи до 12 Мбит/с и с размерами сегментов сети до 32 устройств. Количество устройств можно увеличить с помощью повторителей интерфейса. Для увеличения дальности передачи в Profibus предусмотрена возможность работы с оптоволоконным кабелем.
Для передачи данных используется NRZ-кодирование и 11-битный формат.
Канальный уровень
Канальный уровень модели OSI b Profibus называется FDL-ypoвнем (Field-bus Data Link — промышленный канал связи). Объект МАС (Medium Access Control— управление доступом к каналу) на канальном уровне определяет процедуру передачи данных устройствами, включая управление правами на передачу данных через сеть.
В сети Profibus для доступа ведущих устройств к сети используется метод передачи маркера. В этом методе сеть имеет логическую топологию кольца (т.е. кольца на уровне адресов устройств), каждое ведущее устройство получает доступ к сети только при получении маркера. Существуют следующие методы работы:
1) методе «ведущий/ведомый» процедуру коммуникации с ведомыми устройствами выполняет мастер, который обладает маркером.
2)На время обладания маркером мастер становится ведущим также по отношению к другим мастерам, т.е. может выполнять с ними коммуникацию типа «мастер-мастер».
3)широковещательный режим работы, когда ведущее устройство посылает сообщение «всем», не ожидая уведомления о получении,
4) многоабонентский режим, когда ведущее устройство посылает одно и то же сообщение сразу нескольким участникам сети.
В сети могут использоваться устройства трех типов:
• DP мастер класса 1 (DPМ1) — центральный контроллер, который циклически обменивается информацией с ведомыми устройствами с заранее определенным периодом;
• DP мастер класса 2 (DPМ2) — устройство, предназначенное для конфигурирования системы, наладки, обслуживания или диагностики;
• ведомое устройство — устройство, которое выполняет сбор информации или выдачу ее исполнительным устройствам.
Коммуникационный профиль DP позволяет сконфигурировать как одномастерную, так и многомастерную сеть.
Передача сообщений. Profibus использует два типа сервисов для передачи сообщений: SRD (Send and Receive Data with acknowledge — отправка и прием данных с уведомлением) и SND (Send Data with No acknowledge — отправка данных без уведомления).
Сервис SRD позволяет отправить и получить данные в одном цикле обмена.
Сервис SND используется, когда надо отправить данные одновременно группе ведомых устройств (многоабонентский режим) или всем ведомым устройствам (широковещательный режим). При этом ведомые устройства не отправляют свои уведомления мастеру.
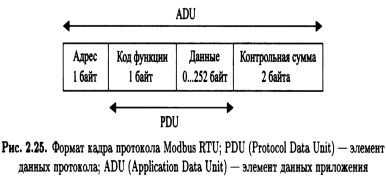
Сообщение в Profibus называется телеграммой. Телеграмма может содержать до 256 байтов, из них 244 байта данных, плюс 11 служебных байтов (заголовок телеграммы).
21. Промышленная сеть Modbus.
Разновидностями Modbus являются протоколы ModbuS Plus— многомастерный протокол с кольцевой передачей маркера и Modbus ТСР, рассчитанный на использование в сетях Ethernet и Интернет.
Протокол Modbus имеет два режима передачи: RTU (Remote Terminal Unit — удаленное терминальное устройство) и ASCII. Стандарт предусматривает, что режим RTU в протоколе Modbus должен присутствовать обязательно, а режим ASCII является опционным.
Стандарт Modbus предусматривает применение физического интерфейса RS-485, RS -422 или RS -232. Наиболее распространенным для организации промышленной сети является 2-проводной интерфейс RS -485. Для соединений точка-точка может быть использован интерфейс RS -232 или RS -422.
Модель ОSI протокола Modbus содержит три уровня: физический, канальный и прикладной
Сегмент сети, не содержащий повторителей интерфейса, должен допускать подключение до 32 устройств, Протокол Modbus предполагает, что только одно ведущее устройство (контроллер) и до 247 ведомых (модулей ввода-вывода) могут быть объединены в промышленную сеть. Обмен данными всегда инициируется ведущим. Ведомые устройства никогда не начинают передачу данных, пока не получат запрос от ведущего. Ведомые устройства также не могут обмениваться данными друг с другом. Поэтому в любой момент времени в сети Modbus может происходить только один акт обмена.
Описание кадра (фрейма) протокола Modbus. В протоколе Modbus RTU сообщение начинает восприниматься как новое после паузы (тишины) на шине длительностью не менее 3,5 символов (14 бит), т.е. величина паузы в секундах зависит от скорости передачи.
Поле адреса всегда содержит только адрес ведомого устройства, даже в ответах на команду, посланную ведущим.
Структура данных в режиме RTU. В режиме RTU данные передаются младшими разрядами вперед.
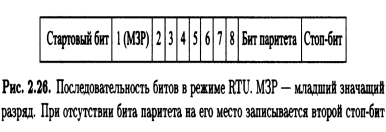
По умолчанию в RTU режиме бит паритета устанавливают равным 1, если количество двоичных единиц в байте нечетное, и равным 0, если оно четное. Такой паритет называют четным (еven раrity), а метод контроля называют контролем четности.
Контроль ошибок. В режиме RTU имеется два уровня контроля ошибок в сообщении: контроль паритета для каждого байта (опционно) и контроль кадра в целом с помощью СRС метода.
Прикладной уровень Modbus основан на запросах с помощью кодов функций. Код функции указывает ведомому устройству, какую операцию оно должно выполнить.
Коды функций. Стандартом Modbus предусмотрены три категории кодов функций: установленные стандартом, задаваемые пользователем и зарезервированные.
Коды функций являются числами в диапазоне от 1 до 127. Коды в диапазоне от 65 до 72 и от 100 до 110 относятся к задаваемым пользователем функциям, в диапазоне от 128 до 255 коды зарезервированы для пересылки кодов ошибок в ответном сообщении. Код «О» не используется.
Коды ошибок используются ведомым устройством, чтобы определить, какое действие предпринять для их обработки