

Інтегралом рівняння (1.20) при збільшені вхідного тиску стрибком від нуля до рвх. Є формула
![]() (1.21)
(1.21)
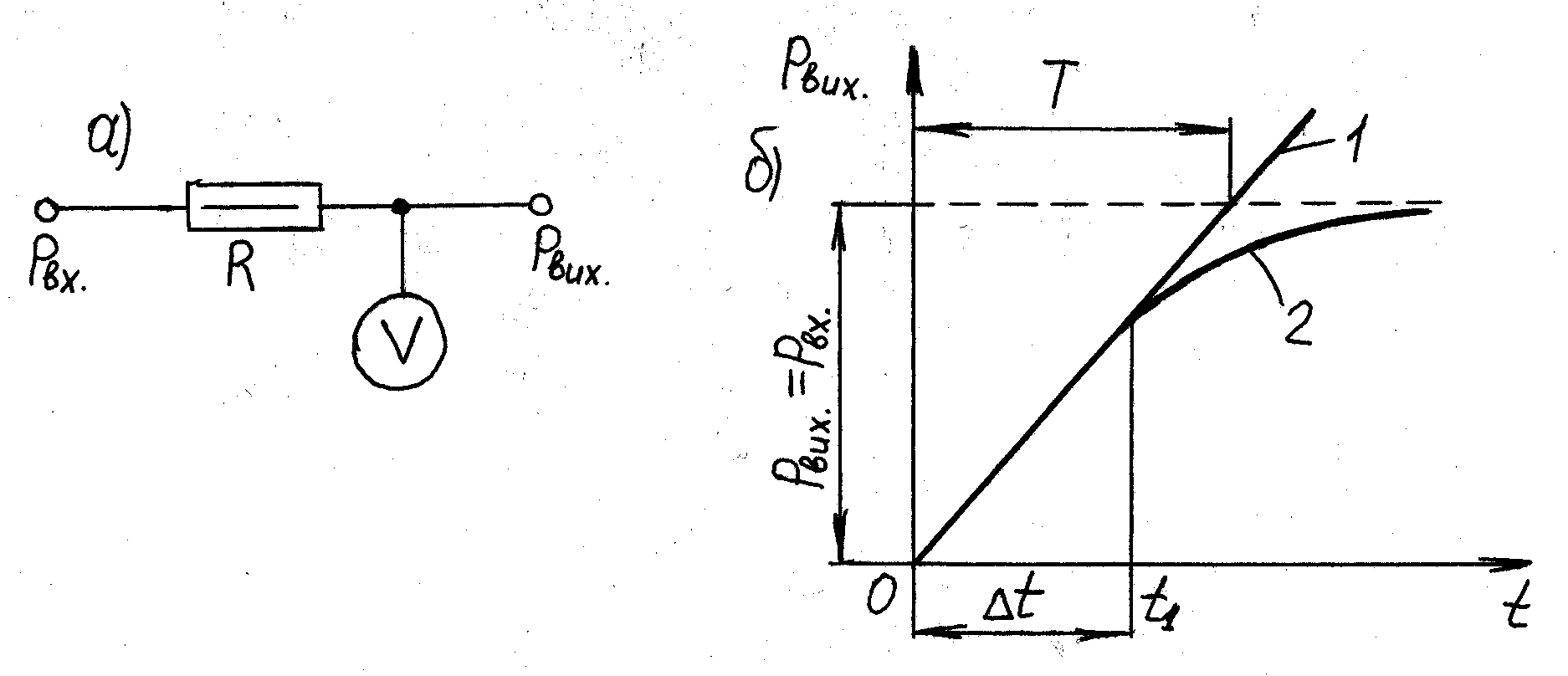
Рис.1.7. Схема (а) то крива розгону (б) що пояснює принцип роботи пасивних інтегруючих пристроїв.
Крива 2, що побудована по цьому рівнянню, показана на рис.1.7, б. Тут же показані зміни тиску на виході ідеального інтегруючого пристроя при постійному значенні вхідного сигналу. Відповідно (1.19) при постійному вхідному сигналі, що подається на вхід ідеального інтегратора
![]() (1.22)
(1.22)
т.ч. отримаємо рівняння прямої 1, що виходе з початку координат.
Швидкість інтегрування обернено пропорційна постійній часу інтегрування Т.
З рис.1.7, б видно, що до митті часу t1 сигнал на виході аперіодичної ланки та ідеального інтегратора змінюється в часі практично однаково, що показує на можливість інтегрування з допомогою аперіодичної ланки вхідних пневматичних сигналів в перебіг часу Δt. При збільшені часу збільшується також різниця сигналів аперіодичної ланки та ідеального інтегратора, що збільшує похибку інтегрування. Оцінити величину ΔРВИХ.(t) абсолютної похибки при зміні вхідного сигнала стрибком, можливо якщо взяти різницю сигналів (1.22) і (1.21) в одну і ту ж мить часу
![]()
Використовуя
розкладення функції
![]() в степенний ряд і взяв два перших члена
розкладення, отримаємо
в степенний ряд і взяв два перших члена
розкладення, отримаємо
![]() (1.23)
(1.23)
Величина Т визначає масштаб вихідного сигнала і її збільшення приводить до зменшення вихідного тиску. Для підсилення вихідного тиску пасивних інтегруючих пристроїв використовують пневматичні підсилювачі.
Так як тривалість інтегрування обмежена значенням Т та стабільністю підсилювача пасивні інтегруючі пристрої використовують для інтегрування сигналів тиску що швидко змінюються. Для виключення впливу на Т значень вхідних пневмоємкостей сигнал з пневмокамери подають в пневмоповторювач (рис.1.8, а). Роль повторювача може використовувати трьохмембранний підсилювач з одиничним заперечним зворотнім зв’язком (рис.1.8, б).

Рис.1.8. Схема пасивних пневматичних інтегруючих пристроїв.
Аналогові пневматичні інтегруючі пристрої замкненого типу.
Ці пристрої можуть бути побудовані з використанням як додатного, так і заперечного зворотнього зв’язку. Принцип додатного зворотнього зв’язку використовують при створенні інтеграторів на базі аперіодичної ланки.
Аперіодична ланка здійснює інтегрування тиску приблизно. Основною причиною похибки при цьому є те, що витрати повітря крізь пневмоопір визначається не вхідним інтегруємим тиском, а різницею вхідного і вихідного тисків. Постійну часу Т при постійній температурі θ газу представимо таким чином:
![]() (1.24)
(1.24)
де
![]() - акумулюючи здібність пневмокамери
об’ємом
V;
- акумулюючи здібність пневмокамери
об’ємом
V;
![]() - значення пневмоопору.
- значення пневмоопору.
Формулу (1.20) представим т.ч.
![]()
звідки
![]() Інтегруя останній вираз по часу, отримаємо
Інтегруя останній вираз по часу, отримаємо
![]() (1.25)
(1.25)
вираз
![]() є масові витрати σ
повітря крізь пневмоопір і тому (1.25)
перепишемо у вигляді
є масові витрати σ
повітря крізь пневмоопір і тому (1.25)
перепишемо у вигляді
![]()
Таким
чином, з ростом тиску РВИХ.
в пневмокамері при РВХ.
= const
витрати σ
повітря крізь пневмоопір зменшуються.
Якщо к тиску РВХ.
на вході в кожну мить часу додавати
тиск, що дорівнює тиску на виході, то
можливо виконати точне інтегрування
вхідного сигнала. Прийняв значення
тиску
![]() на вході в аперіодичну ланку
на вході в аперіодичну ланку
![]() і підставив в (1.25) одержимо
і підставив в (1.25) одержимо
![]() (1.26)
(1.26)
Сумування РВХ. і РВИХ. в кожну мить часу в процесі інтегрування приводе до того, що вихідний сигнал є інтегралом від вхідного. Реалізувати сумування можливо за допомогою підсумовувала (рис.1.9, а).
На рис.1.9, б, в показані найбільш розповсюджені схеми інтеграторів з мембранним підсумовувачем (рис.1.9, б – чотирьохвходовим, рис.1.9, в – трьохвходовом підсилювачах).
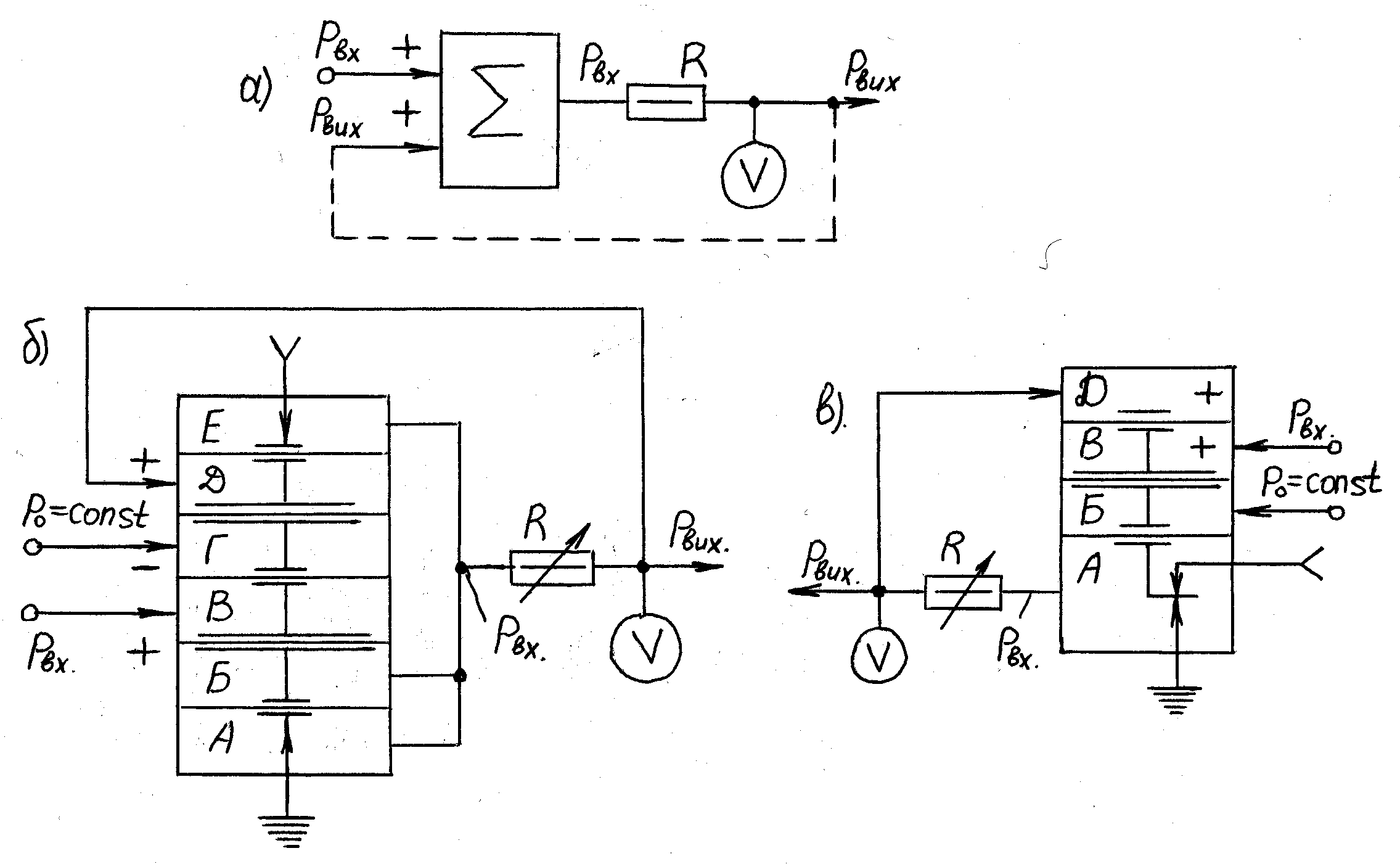
Рис.1.9. Схеми пневматичних інтегруючих пристроїв замкненого типу з додатнім зворотнім зв’язком.
Принцип заперечного зворотнього зв’язку використовується для створення інтеграторів на базі підсилювачів з великим коефіцієнтом підсилення та пневмоконденсаторів. Принципові схеми цих інтеграторів показані на рис.1.10, а, б. В схемі що показана на рис.1.10, а використовують двохвходовий трьохмембранний підсилювач.
Для двохвходового підсилювача в розімкненому режимі
![]() (1.27)
(1.27)
де Ко – коефіцієнт підсилення.
Для вузла “а” запишемо рівняння нерозривності потоків
![]() (1.28)
(1.28)
Витрати
![]() крізь вхідний пневмоопір визначається
як
крізь вхідний пневмоопір визначається
як
![]() (1.29)
(1.29)
а
витрати
![]() крізь пневмоконденсатор
крізь пневмоконденсатор
![]() (1.30)
(1.30)
де С – ємність пневмоконденсатора.
При
великом коефіцієнті підсилення
підсилювача в розімкненому режимі
Ра≈Ро,
так як
![]() Підставив значення Ра=Ро
в (1.29) і (1.30) з врахуванням (1.28) знайдемо
Підставив значення Ра=Ро
в (1.29) і (1.30) з врахуванням (1.28) знайдемо
![]() (1.31)
(1.31)
Вирішив (1.31) відносно РВИХ., отримаємо
![]() (1.32)
(1.32)
Якщо необхідно одержати операцію інтегрування без інвертірованія результата, та використовують схему що показана на рис.1.10, б. В цій схемі вихідний сигнал інтегратора РВИХ. подається на вхід інвертую чого підсилювача, коефіцієнт підсилення якого дорівнює одиниці.
![]() (1.33)
(1.33)

Рис.1.10. Схеми пневматичних інтегруючих пристроїв замкненого типа з заперечним зворотнім зв’язком.
Аналогові пневматичні диференцюючі пристрої.
Використовують для реалізації різних законів регулювання та виконання часових операцій. Залежність між вхідним РВХ. і вихідним РВИХ. сигналами диференцюючого пристроя має вигляд
![]() (1.33)
(1.33)
де К – коефіцієнт підсилення диференціатора.
Аналогові диференцюючі пристрої розподіляють на пристрої розімкненого та замкненого типа в залежності від того використовується чи ні в схемі пристроя заперечний зв’язок.
Диференцюючі пристрої розімкненого типу.
Для
використання операції диференціювання
необхідно вимірювати витрати повітря
крізь пневмоопір, який є функцією
швидкості зміни вхідного тиску.
Вимірювання витрат зручно здійснювати
по перепаду тиску на опорі R,
який буде в даному випадку вихідним
сигналом диференціатора,
![]() (рис.1.11, а).
(рис.1.11, а).

Рис.1.11. Схема (а) та часові характеристики (б-г) що пояснюють принцип дії пасивного пневматичного диференцюючого пристроя.
Коли тиск РК в пневмоємкості дорівнює тиску РВХ., витрати повітря крізь пневмоопір R дорівнює нулю. При зміні стрибком тиску РВХ. крізь опір R починає протікати повітря, витрати якого стають рівними нулю тільки після деякого часу, коли тиск РК буде дорівнювати тиску РВХ..
Зміни тиску РК виражаються диференційним рівнянням аперіодичної ланки
![]() (1.34)
(1.34)
Представив в (1.34) РК у вигляді РК = РВХ. – РВИХ., отримаємо
![]() (1.35)
(1.35)
Величину Т, що дорівнює RC, називають часом диферецювання. Інтегрування (1.34) при зміні вхідного сигнала стрибком приводе до виразу
![]() (1.36)
(1.36)
При зміні вхідного сигнала стрибком, коли тиск РК = 0, тиск РВИХ. миттєво збільшується до тиску РВХ. (рис.1.11, г). Далі починає зростати тиск РК (рис.1.11, в), як в звичайній аперіодичній ланці, по експоненті і перепад тиску на пневмоопорі R падає по експоненті (рис.1.11, г). Для того щоб наблизити реакцію реального диференцюючого пристроя на стрибковий вхідний сигнал до реакції на нього ідеального диференцюючого пристроя необхідно зменшити постійну часу Т. Зміна величини Т в цьому випадку приводе до зменшення тиску РВИХ., що робить складним використання.

Рис.1.12. Схема пасивного аналогового пневматичного пристроя.
В схемі (рис.1.12) показан пасивний диференцюючий пристрій з мембранним суматором. Суматор зібран на чотирьохвходовом підсилювачі і служить для вимірювання перепаду тиску в камерах Д і Г мембранний блок зміщується відносно верхнього або нижнього сопла підсумовувала. На виході є сигнал, пропорційний перепаду тисків в камерах Д і Г. В камеру В подається тиск Ро, що відповідає нульовому рівню.
Аналогові пневматичні диференцюючі пристрої замкненого типу.
Диференцюючі
пристрої розімкнутого типу не забезпечують
високу точність виконання операції
диференціювання із-за присутності члена
![]() Похибка роботи пасивних пристроїв
виникає із-за того, що в процесі
диференціювання витрати повітря в
пневмоємкості створюються не вхідним
тиском, а перепадом тисків РВХ.
– РК
,
є джерелом методичної похибки
диференціювання. Компенсувати цю похибку
можливо якщо подати вихідний тиск на
вхід схеми. Дійсно, з (1.35) отримаємо
Похибка роботи пасивних пристроїв
виникає із-за того, що в процесі
диференціювання витрати повітря в
пневмоємкості створюються не вхідним
тиском, а перепадом тисків РВХ.
– РК
,
є джерелом методичної похибки
диференціювання. Компенсувати цю похибку
можливо якщо подати вихідний тиск на
вхід схеми. Дійсно, з (1.35) отримаємо
![]() (1.37)
(1.37)
Якщо до тиску РВХ. кожну мить додавати тиск РВИХ. т.ч. маємо , то (1.37) має вигляд
![]() (1.38)
(1.38)
Таку операцію можливо виконувати за допомогою додатного зворотнього зв’язку.
Принцип додатного зворотнього зв’язку в схемі пневматичного диференціатора показан на рис.1.13. Вхідний сигнал поступає на пасивний диференціатор крізь суматор, де до значення цього сигнала додається значення вихідного сигнала усього пристроя, т.ч. пасивний диференціатор охоплен додатнім зворотнім зв’язком.

Рис.1.13.
Пневматичні пристрої предваренія.
В пневмоавтоматиці одержали широке застосування пристрої предваренія. Вони використовуються при конструюванні пневматичних регуляторів та реалізують операцію
![]() (1.39)
(1.39)
де Тn – час предваренія (постійна часу диференціювання).
Пристрої предваренія будують або на базі пасивних диференціаторів, або на базі пневматичного підсилювача з великим коефіцієнтом підсилення, що охоплен заперечним зворотнім зв’язком.
На
рис.1.14, а показан пристрій предваренія
що реалізован на базі двохвходового
підсилювача, в заперечний зворотній
зв’язок
якого включена аперіодична ланка
(пневмоємкість V
та пневмоопір R).
Рівновага підсилювача буде в тому
випадку, коли тиски в камерах Б
і В
однакові. Тиск в камері В
дорівнює РВХ.,
а тиск в камері Б
це диференційне рівняння аперіодичної
ланки, т.ч.
![]() де Т
– постійна часу аперіодичної ланки.
Враховуючи, що при великому коефіцієнті
підсилення підсилювача РБ
= РВ
= РВХ.,
останній вираз перепишемо у вигляді
де Т
– постійна часу аперіодичної ланки.
Враховуючи, що при великому коефіцієнті
підсилення підсилювача РБ
= РВ
= РВХ.,
останній вираз перепишемо у вигляді
![]()
Час предваренія можливо змінювати шляхом зміни провідності змінного пневмоопора R.

Рис.1.14. Схеми пневматичних пристроїв предваренія.
В такій схемі виникають незатухаючі автоколивання. Тому часто використовують схему що виконана на базі 4-х входового підсилювача (рис.1.14, б). Аперіодична ланка в цій схемі включена в заперечний зворотній зв’язок підсилювача. Крім того, підсилювач охоплен одиничним додатнім зв’язком крізь пневмоопір RД , що виконує демфіруючу функцію.
Література: [8] стор.151-154; [3] стор.199-215.
Лекція 4. Аналогові універсальні функціональні перетворювачі без методичної похибки. Функціональні перетворювачі з методичною похибкою; мембранні функціональні перетворювачі з шматково-лінійною апроксимацією.
Функціональні
перетворювачі – розрахункові пристрої,
що служать для відтворення елементарних
нелінійних залежностей вигляда
![]() .
Якщо реалізуємо функціональним
перетворювачем залежність може бути
змінена за рахунок перерахування
параметрів без зміни конструкції
перетворювача, то такі функціональні
перетворювачі володіють властивістю
універсальності з точки зору класу
відтворюваних нелінійних залежностей
і називаються універсальними
функціональними перетворювачами.
Функціональні перетворювачі які не
мають таких влстивостей та відтворюють
функцію тільки одного виду, називають
спеціалізованими
функціональними перетворювачами.
.
Якщо реалізуємо функціональним
перетворювачем залежність може бути
змінена за рахунок перерахування
параметрів без зміни конструкції
перетворювача, то такі функціональні
перетворювачі володіють властивістю
універсальності з точки зору класу
відтворюваних нелінійних залежностей
і називаються універсальними
функціональними перетворювачами.
Функціональні перетворювачі які не
мають таких влстивостей та відтворюють
функцію тільки одного виду, називають
спеціалізованими
функціональними перетворювачами.
По методу відтворення заданої функції універсальні перетворювачі розподіляють на перетворювачі: а) що роблять без методичної похибки; б) що роблять з методичною похибкою.
Перші точно реалізують функції але складні по конструкції.
Перетворювачі,
що роблять з методичною похибкою,
теоретично точно відтворюють деяку
функцію
![]() ,
яка приблизно з потрібною точністю
апроксимує задану функцію
.
,
яка приблизно з потрібною точністю
апроксимує задану функцію
.
Універсальні функціональні перетворювачі без методичної похибки.
Кулачкові
функціональні перетворювачі (рис.1.15)
найбільш розповсюджені. Тиск
![]() ,
що перетворюється, подається в сильфон
1, який перетворює цей тиск в пропорційне
лінійне зміщення штока 2. Пристрій 4
здійснює перетворення лінійного зміщення
штока 3в кут повертання осі 5 з кулачком
6. Профіль кулачка, по якому котиться
ролик 7, вибирають відповідно з заданій
функціональною залежністю між
,
що перетворюється, подається в сильфон
1, який перетворює цей тиск в пропорційне
лінійне зміщення штока 2. Пристрій 4
здійснює перетворення лінійного зміщення
штока 3в кут повертання осі 5 з кулачком
6. Профіль кулачка, по якому котиться
ролик 7, вибирають відповідно з заданій
функціональною залежністю між
![]() і
.
При повертанні кулачка 6 повертається
також важіль 8, що змінює степінь натяжіння
пружини 9. Сила
і
.
При повертанні кулачка 6 повертається
також важіль 8, що змінює степінь натяжіння
пружини 9. Сила
![]() ,
що виникає від деформації пружини, діє
через важіль 10 на перетворювач 12, вихідний
сигнал
якого врівноважує силу
,
що виникає від деформації пружини, діє
через важіль 10 на перетворювач 12, вихідний
сигнал
якого врівноважує силу
![]() на мембрані 11.
на мембрані 11.
Рівняння
пристроя 4, що перетворює вхідний тиск
в кут повертання кулачка
![]() ,
має вигляд:
,
має вигляд:
![]() ,
(1.40)
,
(1.40)
де
![]() -
коефіцієнт перетворювача який залежить
від ефективної площі сильфона та
жорсткості пружини.
-
коефіцієнт перетворювача який залежить
від ефективної площі сильфона та
жорсткості пружини.
Залежність
кута
![]() повертання важеля 8 від кута
повертання кулачка 6 визначається
профілем кулачка і може бути записана:
повертання важеля 8 від кута
повертання кулачка 6 визначається
профілем кулачка і може бути записана:
![]() .
(1.41)
.
(1.41)
Нижній
кінець пружини 9 при повертанні кулачка
зміщується по дузі, довжина якої
![]() .
Так як кут повертання
малий, то рахуєм, що сила
лінійно залежить від кута повертання
важеля 8:
.
Так як кут повертання
малий, то рахуєм, що сила
лінійно залежить від кута повертання
важеля 8:
![]() (1.42)
(1.42)
де
![]() -
жорсткість пружини.
-
жорсткість пружини.
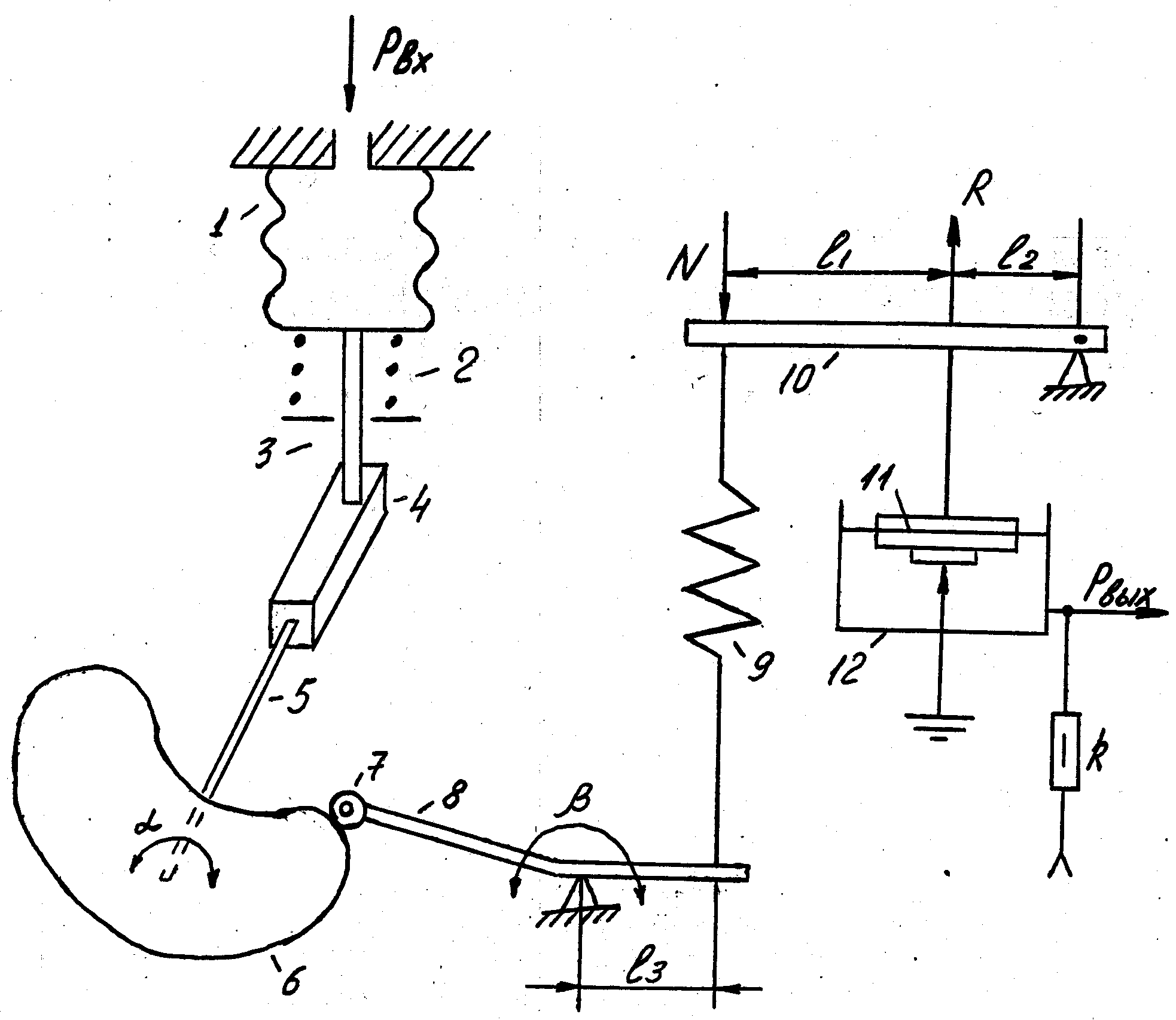
Рис.1.15. Схема кулачкового функціонального перетворювача.
Сила, що передає на мембрану 11 при розтяжінні пружини 9, зв’язана з силою :
![]() .
(1.43)
.
(1.43)
Тиск пневматичного перетворювача, що створює на мембрані 11 врівноважуюче зусилля:
![]() (1.44)
(1.44)
де
![]() - ефективна площа мембрани 11.
- ефективна площа мембрани 11.
З (1.40) - (1.44) знайдемо:

Якщо
залежність, яку повинен реалізувати
функціональний перетворювач, задана у
вигляді
![]() ,
то функцію
,
то функцію
![]() ,
що визначає профіль кулачка, через
задану функцію можливо визначити таким
чином:
,
що визначає профіль кулачка, через
задану функцію можливо визначити таким
чином:

Функціональні перетворювачі з методичною похибкою.
Дія
функціональних перетворювачів з
методичною заснована на шматково-лінійній,
шматково-нелінійній та нелінійній
апроксимації заданої функції. Універсальні
функціональні перетворювачі, що роблять
по методу шматково-лінійної апроксимації,
відтворюють шматково-лінійну функцію
![]() ,
якою замінюється функція
,
якою замінюється функція
![]() ,
що підлягає реалізації(рис.1.16).
,
що підлягає реалізації(рис.1.16).
При
шматково-лінійної апроксимації нелінійної
функції
необхідно відшукати параметри
шматково-лінійної апроксимації
таким чином, щоб у всьому діапазоні
зміни аргумента
дотримувалася нерівність
![]() де
де
![]() -
допустима похибка апроксимації.
-
допустима похибка апроксимації.
Точність апроксимації там більше, чим більше відрізків, на яка розбита вісь абсцис. Але збільшення точності приведе до збільшення елементів, що складають функціональний перетворювач та зменшує його надійність.
При
конструюванні перетворювачів задану
функцію
![]() апроксимують шматково-лінійною функцією
вигляду:
апроксимують шматково-лінійною функцією
вигляду:
![]() (1.45)
(1.45)
де
![]() -
текуче значення вхідного тиску;
-
текуче значення вхідного тиску;
![]() - абсциса і-го проміжку розбієнія;
- абсциса і-го проміжку розбієнія;
![]() - ордината функції
для
- ордината функції
для
![]()
![]() ;
;
![]() - кутовий
коефіцієнт прямої на і-му проміжку
апроксимації.
- кутовий
коефіцієнт прямої на і-му проміжку
апроксимації.
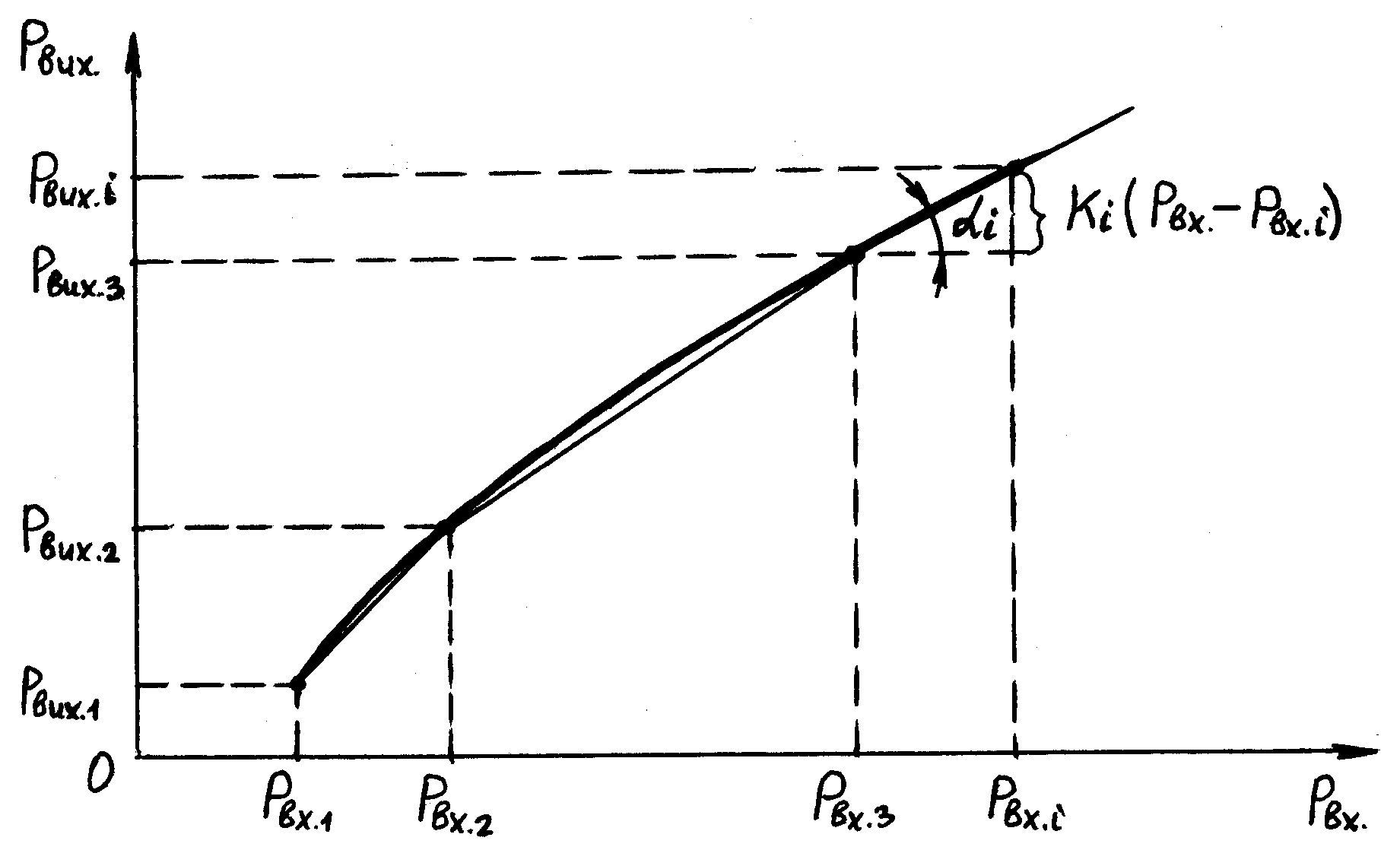
Рис. 1.16. Шматкова апроксимація нелінійної функції.
Апроксимація відбувається таким чином, що кожній точці значення функції складається з значення на даному відрізку і відстані від цього значення до нахиленої апроксимуючої прямої. На кожному відрізку апроксимації робить тільки один пристрій функціонального перетворювача, що визначає нахил прямої на і-м відрізки а всі другі пристрої в цей час відключені.
Мембранні функціональні перетворювачі з шматково-лінійною апроксимацією.
Для функцій, у яких з збільшенням аргументу значення похідної зменьшується, а сама функція збільшується, можливо використати інший принцип реалізації шматково-лінійної апроксимації.
Розбиває показано на рис.1.16 функцію на участки та замінює її в межах кожного участка прямою, бачимо що пряма має менші ординати, ніж прямі, що апроксимують другі участки.
Таким
чином, для таких функцій при наявності
апроксимуючих пристроїв для кожного
участка підключення їх до виходу
функціонального перетворювача можливо
здійснити не по значенню вхідного
сигнала, а підключенням того апроксимуючого
пристроя, який має найменший вихідний
сигнал. Схема перетворювача що реалізує
цей принцип показана на рис.1.17. Він
складається з трьох повторювачів з
зсувом(![]() );
двох суматорів
);
двох суматорів
![]() і
і
![]() на пневмоопорах; задатчика 3, точного
повторювача, зібраного на двовходному
підсилювачі; підсилювача потужності.
на пневмоопорах; задатчика 3, точного
повторювача, зібраного на двовходному
підсилювачі; підсилювача потужності.
Рис.1.17.
Для
відтворення апроксимуючих прямих 2 і 3
використовують повторював
![]() з суматором
та повторювачем
з суматором
та повторювачем
![]() з суматором
(рис.1.17).
Так як початковий участок кривої
апроксимується прямою 1 з нахилом
з суматором
(рис.1.17).
Так як початковий участок кривої
апроксимується прямою 1 з нахилом
![]() (
це роблять при налагодженні перетворювача
для реалізації функції
(
це роблять при налагодженні перетворювача
для реалізації функції
![]() )
то для відтворення прямої 1 вхідний тиск
перетворювача подається безпосередньо
на повторював
)
то для відтворення прямої 1 вхідний тиск
перетворювача подається безпосередньо
на повторював
![]() .
.
Рівняння прямих 1-3 відповідно мають вигляд:
![]()
![]() (1.46)
(1.46)
![]() ,
,
де
![]() та
та
![]() -
кутові коефіцієнти прямих 2 і 3.
-
кутові коефіцієнти прямих 2 і 3.
Для
тисків на виходах з повторювачів
![]() відповідно запишемо:
відповідно запишемо:
![]() (1.47)
(1.47)
![]() (1.48)
(1.48)
![]() , (1.49)
, (1.49)
де
![]() ;
;![]() і
і![]() - значення зсувів тиску, що створюється
повторювачами
- значення зсувів тиску, що створюється
повторювачами
![]() ;
;
![]() - опорний тиск на виході за датчика
- опорний тиск на виході за датчика
![]() - провідності пневмоопорів.
- провідності пневмоопорів.
Зрівнявши відповідні рівняння системи (1.46) з рівняннями (1.47),(1.48) і (1.49), отримаємо:
![]()
![]()
![]()
![]()
![]()
По
відомим з графіка функції значенням
![]() виконують налагодження провідностей
опорів суматорів і розраховують зсуви
виконують налагодження провідностей
опорів суматорів і розраховують зсуви
![]() повторювачів і опорний тиск
повторювачів і опорний тиск
![]() від за датчика 3.
від за датчика 3.
Підключення
повторювачів до вихідної лінії 1
відбувається таким чином. Якщо тиск на
вході
![]() ,
то тиск на виході повторювача
буде менше, ніж тиск в верхніх камерах
повторювачів
,
то тиск на виході повторювача
буде менше, ніж тиск в верхніх камерах
повторювачів
![]() .
Тому в лінії 1 встановлюється тиск, що
визначається повторювачем
,
а повторювані
зачинені.
Коли тиск на вході стає рівним
.
Тому в лінії 1 встановлюється тиск, що
визначається повторювачем
,
а повторювані
зачинені.
Коли тиск на вході стає рівним
![]() ,
відчиняється також і повторювач
.
При збільшенні тиску
,
відчиняється також і повторювач
.
При збільшенні тиску
![]() далі, т.б. коли
далі, т.б. коли
![]() ,
тиск в лінії 1 буде визначатися повторювачем
,
а повторювані
,
тиск в лінії 1 буде визначатися повторювачем
,
а повторювані
![]() зачинені. Таким чином відбувається
підключення повторювача
.
зачинені. Таким чином відбувається
підключення повторювача
.
Промислові функціональні перетворювачі, при стандартному діапазоні вхідних тисків, реалізують залежність:
![]() (1.50)
(1.50)
Література: [1],стор. 47-49; [3], стор. 219-224; [7], стор. 42-44.
Лекція 5. Струменеві функціональні перетворювачі з шматково-лінійною апроксимацією. Аналогові пневматичні множу вальні та ділильні пристрої.
Перетворювачі (рис.1.18) складаються з таких елементів апроксимуючих пристроїв АП1 – АПn які призначені для апроксимації окремих відрізків нелінійної функції прямими; пристроїв зміщення ПЗ1 – ПЗn які здійснюють включення окремих апроксимуючих пристроїв по досягненню відповідного значення вхідного сигнала; інвертуючи пристроїв ІП, що дозволяють апроксимувати функції які мають заперечну похідну сумуючого пристроя, що здійснює сумування всіх сигналів апроксимуючих та інвертуючи пристроїв.

Рис.1.18. Схема струменевого функціонального перетворювача з шматково-лінійною апроксимацією.
Апроксимуючий пристрій АПі що відтворює просту лінійну залежність, складається з двох струменевих підсилювачів (рис.1.19, а). Тиск живлення РЖИВ. Поступає крізь змінний пневмоопір R2 до сопел живлення 1 та 4 першого і другого підсилювачів. Тиск РВХ. крізь змінний пневмоопір R1 подається до сопла 3 першого підсилювача. При відсутності вхідного сигнала потік повітря, що виходе з сопла 1, поступає в прийомний канал 2 першого підсилювача, з’єднаний з соплом 6 другого підсилювача. Повітря витікає з управляючого сопла 6 другого підсилювача, відхиляє потік повітря, що виходе з сопла 4. Параметри відхиляючого потока підібрані так, що в вихідне сопло 5 другого підсилювача повітря не поступає і тиск в ньому дорівнює нулю. При наявності сигнала на вході зменшується тиск приємному каналі 2 першого підсилювача за рахунок відхилення основного струменя повітря управляючим струменем, зменьшуя також тиск і в управляючому соплі 6 другого підсилювача. На вході другого підсилювача з’являється сигнал, так як струмень повітря, що тече з управляючого сопла 6, вже неповністю відхиляє потік, який тече з сопла 4. Якщо вхідний тиск збільшується далі то на виході апроксимуючого пристроя тиск також збільшується. Коли струмінь, що тече з управляючого сопла 3 першого підсилювача, відхиляє струмінь який тече з сопла живлення 1 цього ж підсилювача, настільки, що тиск в його приємному соплі 2 і відповідно в управляючому соплі 6 другого підсилювача дорівнює нулю, і струмінь що тече з сопла живлення 4 підсилювача, повністю поступає в прийомний канал 5 цього підсилювача і тиск на виході апроксимуючого пристроя стає максимально можливим для прийнятого тиску живлення і провідності опору R2.
Якщо вхідний тиск РВХ. змінюється далі то тиск на виході буде залишатися постійним, тому що при збільшенні РВХ. тиск в прийомному каналі 2 і управляючому соплі 6 дорівнює нулю. Змінні пневмоопори R1 та R2 дозволяють налагоджувати параметри пристроя відповідно з апроксимуючим відрізком даної функції.

Рис.1.19. Схема струменевого функціонального перетворювача.
Аналогові пневматичні множу вальні та ділильні пристрої.
Для вирішування багатьох задач автоматизації виробничих процесів необхідно множити або ділити пневматичні сигнали. Для виконання цих операцій використовують аналогові множу вальні та ділильні пристрої. Загальний вираз, що реалізують пневматичні множу вальні та ділильні пристрої, має вигляд:
 (1.51)
(1.51)
де А – постійний крефіціент; Рі і Рj – тиски.
Відтворення (1.51) забезпечується звичайним каскадним з’єднанням пристроїв, що виконують прості операції слідую чого вигляду:
![]() (1.52)
(1.52)
![]() (1.53)
(1.53)
![]() (1.54)
(1.54)
По реалізації добутку знакозмінних співмножників відрізняють чотирьох-, двох- і одноквадратні множу вальні пристрої. Усі пневматичні множу вальні пристрої – одноквадратні. Така класифікація ділильних пристроїв не має реакції, так як при переході ділителя крізь нуль приватне обертається в нескінченність, що не може бути реалізовано в жодній фізичній системі. Тому, маючи на увазі ділильні пристрої, можливо казати тільки о можливості зміни знака ділителя.
По алгоритму роботи усі множу вальні та ділильні пристрої можливо розподіляти на пристрої прямої та косвенної дії. В пристроях прямої дії операція множення або ділення створюється шляхом безпосереднього множення та ділення аналогів вхідних величин. В пристроях косвенної дії операція множення або ділення відбувається в результаті виконання других математичних дій. Наприклад, при виконанні операції множення в косвенних умовах звичайно беруть залежність
![]() (1.55)
(1.55)
Література: [3] стор.229-234; [7] стор.236-242.
Лекція 6. Аналогові пневматичні пристрої запам’ятовування безперервних пневматичних сигналів, схеми та часові діаграми роботи. Пристрої затримки пневматичних сигналів.
При вирішуванні задач автоматичного контроля і управління часто необхідно запам’ятовувати пневматичні сигнали і затримати їх на деякий час.
Присрої запам’ятовування безперервних пневматичних сигналів.
Для
запам’ятовування
пневматичних сигналів використовують
спеціальні пристрої пам’яті(рис.1.20,а,б,в).
Пристої пам’яті складаються з
пневмоємкості V,
управляємої пневмохлюпалки 1 і
пневматичного повторювача 2, який служить
для зручності зняття сигнала що
зберігається в пневмоємкості. В качестві
управляємої хлюпали використовують
трьохмембранне реле, в одну з середніх
камер якого подається постійний тиск
підпору, а в другу поступає тиск
управління
![]() .
Пристій пам’яті
може бути зібраний у вигляді окремого
елемента(рис.1.20,а). Роздивимось роботу
пристроя пам’яті, коли управління ним
відбувається з допомогою прямокутних
імпульсів, що поступають від генератора.
Якщо на вхід пристроя поступає безперервний
пневматичний сигнал, то такий пристрій
зібраний по схемам, що показані на
рис.1.20,а,в, при подачі на нього тиску
управління
запам’ятовує миттєве значення
пневматичного сигнала, тому що
пневмоємкість відключена від вхідної
лінії. Тиск в пневмоємкості, а тобто,
іна виході схеми зберігається незмінним,
доки подається тиск
.
Пристрій пам’яті, що показано на
рис.1.20,б, запам’ятовує миттєвий тиск у
тому випадку, коли тиск управління
відсутній.
.
Пристій пам’яті
може бути зібраний у вигляді окремого
елемента(рис.1.20,а). Роздивимось роботу
пристроя пам’яті, коли управління ним
відбувається з допомогою прямокутних
імпульсів, що поступають від генератора.
Якщо на вхід пристроя поступає безперервний
пневматичний сигнал, то такий пристрій
зібраний по схемам, що показані на
рис.1.20,а,в, при подачі на нього тиску
управління
запам’ятовує миттєве значення
пневматичного сигнала, тому що
пневмоємкість відключена від вхідної
лінії. Тиск в пневмоємкості, а тобто,
іна виході схеми зберігається незмінним,
доки подається тиск
.
Пристрій пам’яті, що показано на
рис.1.20,б, запам’ятовує миттєвий тиск у
тому випадку, коли тиск управління
відсутній.

Рис.1.20. Схеми пристроїв для запам’ятовування пневматичних сигналів.
Діаграма роботи пристроя пам’яті(рис.1.20,а,в) при постійній частоті імпульсів(рис.1.21,а) і при безперервній зміні вхідного тиску (рис.1.21,б) показана на рис.1.21,в, а діаграма роботи пристроя пам’яті(рис.1.20,в) – на рис. 1.21,г).
Як бачимо з діаграм, перші два пристроя запам’ятовують миттєве значення вхідного сигнала при наявності тиску , а третій пристрій – при відсутності тиску .
Час запам’ятовування пневматичного сигнала без помітної похибки при об’ємі пневмоємкості в декілька десятків мілілітрів може складати декілька десятків хвилин. Воно обмежене наявністю витрат крізь пневмохлюпалку і крізь неплотності в корпусі окремих елементів пристроя. Тому такі пристрої рахуються як оперативні пристрої пам’яті.
Рис.1.21. Часові діаграми роботи пристрою для запам’ятовування непреривних пневматичних сигналів.
Пристрої затримки пневматичних сигналів.
Пристрої оперативної пам’яті, які показані вище, застосовують самостійно в різних пристроях пневмоавтоматики. Але їх часто використовують в пристроях затримки пневматичних сигналів на такт. Схема такого пристроя показана на рис.1.22,а. Пристрій складається з двох послідовно включених комірок пам’яті, перша з яких зібрана по схемі, що показана на рис.1.20,а або в, а друга – по схемі, що показана на рис.1.20,б.
Рис.1.22, а. Схема пневматичного пристроя затримки пневматичного сигнала на такт.

Рис.1.22, б, в, г. Часові діаграми роботи пристроя затримки пневматичного сигнала на такт.
Пристрій
затримки здійснює ступінчасту апроксимацію
безперервного вхідного сигнала
(рис.1.22,б-г)
у слідую чому порядку. Звичайно сигнали
управління
підводяться до пристроя від генератора
прямокутних імпульсів. При
![]() сигнал
,
що подається на вхід першого пристоя
проходить в камеру повторювача і на
виході першого пристроя відробляється
сигнал, що дорівнює
.
В цей час в другому пристрої пам’яті
вхідна камера повторювача від’єднана
від входу першого пристрою і в ній
зберігається тиск, що дорівнює тиску,
який подався від першого пристроя в
мить, коли
в попередньому такті стало дорівнювати
нулю. В цьому випадку цей тиск дорівнює
нулю. Такий тиск і відробляється
повторювачем другого пристою пам’яті
в дану мить часу. В мить часу, коли
дорівнює
умовній одиниці (0,14МПа), у першому пристої
пам’яті зпам’ятовується поточне(в
мить часу t1)
значення тиску
сигнал
,
що подається на вхід першого пристоя
проходить в камеру повторювача і на
виході першого пристроя відробляється
сигнал, що дорівнює
.
В цей час в другому пристрої пам’яті
вхідна камера повторювача від’єднана
від входу першого пристрою і в ній
зберігається тиск, що дорівнює тиску,
який подався від першого пристроя в
мить, коли
в попередньому такті стало дорівнювати
нулю. В цьому випадку цей тиск дорівнює
нулю. Такий тиск і відробляється
повторювачем другого пристою пам’яті
в дану мить часу. В мить часу, коли
дорівнює
умовній одиниці (0,14МПа), у першому пристої
пам’яті зпам’ятовується поточне(в
мить часу t1)
значення тиску
![]() ,
цей тиск поступає в другий пристрій
пам’яті і відробляється повторювачем
на вихід пристроя затримки на такт.
Коли
знову
приймає значення “0”, другий присрій
пам’яті запам’ятовує тиск
,
що поступає від першого пристроя і
продовжує його відробляти. В першому ж
пристрої в цю мить часу поступає вже
нове значення змінюючогося вхідного
сигнала і на його виході відробляється
новий сигнал. В мить часу t2
при
подачі імпульса управління перший
пристрій запам’ятовує нове миттєве
значення вхідного сигнала
,
цей тиск поступає в другий пристрій
пам’яті і відробляється повторювачем
на вихід пристроя затримки на такт.
Коли
знову
приймає значення “0”, другий присрій
пам’яті запам’ятовує тиск
,
що поступає від першого пристроя і
продовжує його відробляти. В першому ж
пристрої в цю мить часу поступає вже
нове значення змінюючогося вхідного
сигнала і на його виході відробляється
новий сигнал. В мить часу t2
при
подачі імпульса управління перший
пристрій запам’ятовує нове миттєве
значення вхідного сигнала
![]() .
Цей сигнал поступає в повторював другого
пристроя пам’яті і потім на вихід
пристроя. Далі усі процеси повторюються.
.
Цей сигнал поступає в повторював другого
пристроя пам’яті і потім на вихід
пристроя. Далі усі процеси повторюються.
При
безперервній зміні вхідного сигналу
тиск на виході пристроя змінюється
ступенями, при цьому висота кожного
степеня, що відраховується від нульового
рівня, дорівнює миттєвому значенню
вхідного сигнала. Після запам’ятовування
миттєвого значення сигнала, як видно з
рис.1.22,г, сигнал на виході присроя не
змінюється в спливанні одного
періода(такту) роботи генератора, т. Ч.
При проходженні крізь цей пристрій
сигнал затримується на один такт. Тому
такі пристрої звуться пристроями
затримки на такт. Тому що, на переключення
контактів пристроя пам’яті потребується
деякий час формування вихідного сигнала
ведеться не точно в мить часу t1
і
t2
і
т.д., а з деяким запізнюванням
![]() (рис.1.22,г).
(рис.1.22,г).
Література: [1],стор.69-71; [3], стор.251-259.
Лекція 7. Аналогові пневматичні пристрої запізнення пневматичних сигналів їх схеми та часові діаграми роботи.
Пристрої запізнення використовують в деяких регуляторах, кореляторах і інших пристроях пневмоавтоматики. Ідеальний пристрій постійного запізнення реалізує функцію:
![]() (1.56)
(1.56)
де
![]() -
час запізнення.
-
час запізнення.
Реакція
блоку запізнення на синусоїдальні
вхідні коливання
![]() записується
виразом
записується
виразом
![]() ,
де
,
де
![]() - амплітуди вихідних і вхідних коливань;
- амплітуди вихідних і вхідних коливань;
![]() - частота коливань. Вигляд амплітудно-частотної
характеристики слідуючий:
- частота коливань. Вигляд амплітудно-частотної
характеристики слідуючий:
![]() а
фазочастотної характеристики, яка
визначається кутом
а
фазочастотної характеристики, яка
визначається кутом
![]() фазового.
фазового.
Роздивимось
деякі схеми пристроїв запізнення. На
рис.1.23 показана структурна схема пристрою
запізнення, який точно відтворює
амплітудно-частотну характеристику і
приблизно-фазочастотну. Пристрій
запізнення складається з ланцюга
послідовно з’єднаних вузлів, що включають
в себе аперіодичну ланку (пневмоопір
![]() та
пневмоємкість
та
пневмоємкість
![]() )
та підсумував. Для кожного такого вузла
можливо записати систему рівнянь:
)
та підсумував. Для кожного такого вузла
можливо записати систему рівнянь:
для
аперіодичної линки:
![]()
для
підсумувача:
![]() де
де
![]() -
тиск в пневмоємкості;
-
тиск в пневмоємкості;
![]() -
постійна часу аперіодичної ланки.
-
постійна часу аперіодичної ланки.
Використовуючи
з цих рівнянь
![]() ,
отримаємо:
,
отримаємо:
![]() (1.57)
(1.57)
При (1.57) має вигляд:
![]() (1.58)
(1.58)
Усталені
коливання на виході першого підсумовувала,
знайдені з рішення (1.58), мають вигляд![]() Вихідний
Вихідний
![]() n-го
вузла, що служить одночасно вихідним
тиском усього пристрою запізнення,
визначається з рівняння
n-го
вузла, що служить одночасно вихідним
тиском усього пристрою запізнення,
визначається з рівняння
![]()

Рис.1.23. Структурна схема пристроя спізнення.
Схема пристрою запізнення, що дозволяє одержати задану точність відтворення як амплітудно-частотної, так і фазочастотної характеристики шляхом вибору відповідного числа складаючи елементів, показана на рис.1.24,а. Такий пристрій можливо реалізувати за допомогою ланцюга пристроїв затримки на такт ПЗТ, що управляються від одного генератора Г. Роздивимось роботу двох послідовно з’єднаних пристроїв ПЗТ. Один ПЗТ запам’ятовує миттєвий тиск, що поступає на вхід
пристрою
на один такт роботи генератора. Припустимо,
що при постійній частоті слідування
імпульсів
![]() (рис.1.24,б) на вхід ПЗТ1
поступає тиск, що змінюється в часі по
закону, показаному на рис.1.24,в. Нехай в
початкову мить часу він дорівнює нулю.
В мить часу
(рис.1.24,б) на вхід ПЗТ1
поступає тиск, що змінюється в часі по
закону, показаному на рис.1.24,в. Нехай в
початкову мить часу він дорівнює нулю.
В мить часу
![]() (рис.1.23,г) пристрій ПЗТ1
запам’ятовує миттєвий тиск
(рис.1.23,г) пристрій ПЗТ1
запам’ятовує миттєвий тиск
![]() ,
пристрій ПЗТ2
(рис.1.24,д) запам’ятовує тиск, що дорівнює
нулю. Це пояснюється тим, що в мить
приходу управляючого сигналу на вході
пристрою ПЗТ2
сигнал який поступає від пристрою ПЗТ1,
був рівний нулю. В мить часу
,
пристрій ПЗТ2
(рис.1.24,д) запам’ятовує тиск, що дорівнює
нулю. Це пояснюється тим, що в мить
приходу управляючого сигналу на вході
пристрою ПЗТ2
сигнал який поступає від пристрою ПЗТ1,
був рівний нулю. В мить часу
![]() пристрій ПЗТ1,
запам’ятовує нове значення миттєвого
сигналу, рівного
пристрій ПЗТ1,
запам’ятовує нове значення миттєвого
сигналу, рівного
![]() ,
а пристрій ПЗТ2
– тиск
який
поступив на його вхід в мить виникнення
управляючого імпульсу. У слідую чому
такті пристрій ПЗТ1
запам’ятовує новий тиск
,
а пристрій ПЗТ2
– тиск
який
поступив на його вхід в мить виникнення
управляючого імпульсу. У слідую чому
такті пристрій ПЗТ1
запам’ятовує новий тиск
![]() ,
а пристрій ПЗТ2
- тиск
.
,
а пристрій ПЗТ2
- тиск
.
Таким
чином, на виході пристрою ПЗТ2
повторюється тиск з виходу пристрою
ПЗТ1,
а отже, і миттєві вхідні тиски з запізненням
в часі на тривалість Т
одного періоду коливань генератора.
Якщо сигнал подається далі в третій
пристрій затримки на такт, то на виході
його зсув між вхідним і вихідним тисками
складає по часу 2Т
(час
запізнювання
складає 2Т).
Якщо включити
![]() пристроїв
затримки на такт, то час запізнювання
складає
пристроїв
затримки на такт, то час запізнювання
складає
![]()
При відповідному підборі частота коливань генератора та кількість пристроїв затримки на такт на виході -го прострою затримки на можливо одержати ступеневу криву, що апроксимує вхідний сигнал і зсунути в часі на величину запізнювання (рис.1.24,г). Висоту ступеня ломаної можливо зробити дуже малою, значно збільшуючи кількість елементів та частоту коливань генератора, що можливо, до тих пір, поки на роботі схеми не стане позначатися час, який необхідний для спрацьовування контактів комірок пам’яті.
В зв’язку з цим, найбільш просте і ефективне друге рішення, при якому використовують інтегратор (рис.1.25).
Інтегратор,
один вхід(додатній) якого підключений
до виходу
![]() -го
пристрою затримки на такт, а
другий(заперечний) – до виходу
-го
пристрою затримки на такт, що дозволяє
заміняти ступеневу апроксимуючу
залежність шматково-лінійною. Робота
пристрою спізнення з інтегратором
пояснюється графіками, що показані на
рис.1.25,б-д, з яких видно, що за інтервал
часу
-го
пристрою затримки на такт, а
другий(заперечний) – до виходу
-го
пристрою затримки на такт, що дозволяє
заміняти ступеневу апроксимуючу
залежність шматково-лінійною. Робота
пристрою спізнення з інтегратором
пояснюється графіками, що показані на
рис.1.25,б-д, з яких видно, що за інтервал
часу
![]() в
інтегратор поступає сигнал
в
інтегратор поступає сигнал
![]() ,
який дорівнює
,
який дорівнює
![]() .
.
При
відповідному виборі часу інтегрування
за інтервал
на виході інтегратора сигнал значення
![]() змінюється
лінійно до значення
змінюється
лінійно до значення
![]() (рис.1.25,г).
Таким чином, замість степеневої зміни
вихідного сигналу, як це було в пристрої
запізнювання, що був показаний раніше,
на виході інтегратора, який є вихідним
для всього пристрою, тиск зростає (або
убуває, наприклад, на відрізку часу
(рис.1.25,г).
Таким чином, замість степеневої зміни
вихідного сигналу, як це було в пристрої
запізнювання, що був показаний раніше,
на виході інтегратора, який є вихідним
для всього пристрою, тиск зростає (або
убуває, наприклад, на відрізку часу
![]() лінійно(рис.1.25,г). Це дозволяє більш
точно відтворити зсунутий на час
вхідний сигнал.
лінійно(рис.1.25,г). Це дозволяє більш
точно відтворити зсунутий на час
вхідний сигнал.
Рис.1.24. Схема (а) та часові діаграми (б-е) роботи пневматичного пристроя спізнювання на пристроях затримки на такт.

Рис.1.25. Схема (а) та часові діаграми (б-д) пристроя спізнювання на пневматичних пристроях затримки на такт з інтегратором.
Література: [1],стор.71-72; [3], стор. 250-265.
Лекція 8. Пневматичні генератори прямокутних коливань на мембранних елементах. Імпульсатори.
Пневматичний генератор прямокутних коливань складається з пневмореле мембранного типу УСЕППА і аперіодичної ланки (пневмоємності і пневмоопору) і різних допоміжних пристроїв. Аперіодична ланка, вмикається в зворотній зв’язок реле і застосовується в генераторах для затримки пневматичного сигналу по часу.
Схема пневматичного генератора прямокутних імпульсів представлена на рис.2.1. В пневмокамеру “В” реле подається тиск підпору РП, пневмокамера “Б”
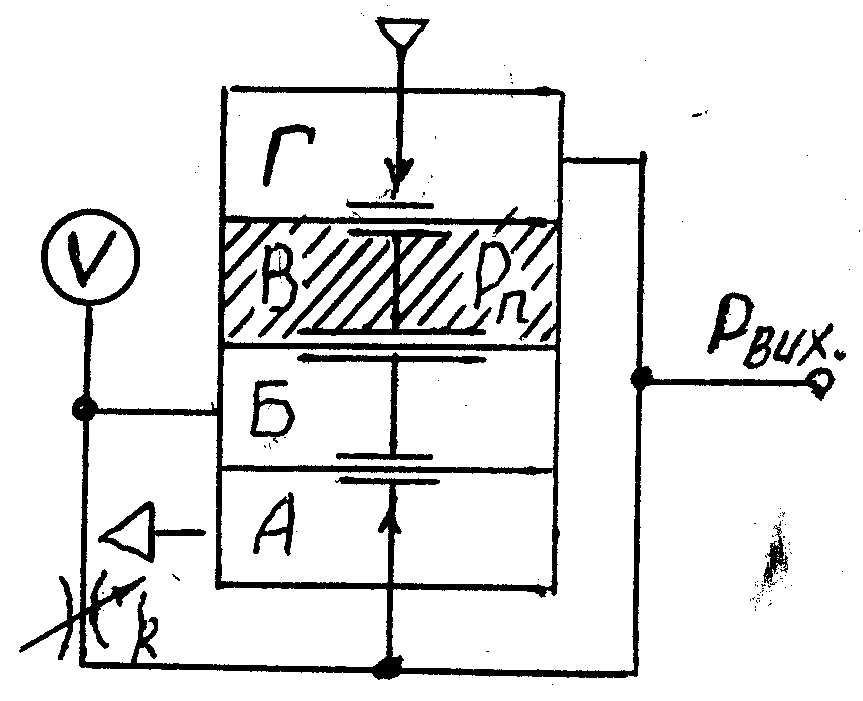
Рис.2.1
з’єднана з аперіодичною ланкою, тиск на вхід якої поступає з виходу генератора. В камері зворотнього зв’язку “Б” в процесі роботи тиск змінюється від Ра до Рб. Ці граничні тиски звуться тисками спрацювання. Часова діаграма роботи генератора показана на рис.2.2.

Рис.2.2
В
момент часу t1
(рис.2.2) під дією підпору РП
в пневмокамері “В” рухомий мембранний
блок реле рухається до низу і відкриває
верхнє сопло, крізь яке повітря живлення
поступає на вхід генератора, де сигнал
РВИХ
=
1. При цьому починає збільшуватися по
експоненті тиск
![]() в камері “Б” (Т
– постійна часу аперіодичної ланки), а
отже, і в пневмоємкості V.
В момент часу t2,
коли тиск Ра
дорівнє Рб,
мембранний блок піднімається і зачиняє
сопло живлення. На виході генератора
сигнал дорівнює нулю (РВИХ
= 0).
в камері “Б” (Т
– постійна часу аперіодичної ланки), а
отже, і в пневмоємкості V.
В момент часу t2,
коли тиск Ра
дорівнє Рб,
мембранний блок піднімається і зачиняє
сопло живлення. На виході генератора
сигнал дорівнює нулю (РВИХ
= 0).
Крізь
дросель R
починає спорожнюватися пневмокамера
“Б” і пневмоємкість V
і тиск по експоненті зменшується від
Рб
до Ра.
В момент t3
зусилля від тиску РП
стає більше зусилля від Рб,
мембранний блок відкриває сопло живлення
і РВИХ
стає рівним одиниці. Період коливань
ТК
дорівнює сумі часу
![]() і
і
![]() Значення ТК
можливо змінити за допомогою пневмоопору
або пневмоємності які входять в склад
аперіодичної ланки.
Значення ТК
можливо змінити за допомогою пневмоопору
або пневмоємності які входять в склад
аперіодичної ланки.
Співвідношення між Т1 і Т2 в цьому генераторі не змінюється. Величина підпору РП впливає на тривалість такту ТК і одночасно на співвідношення Т1 і Т2 сигналів усередині такту.
Наступним етапом лабораторної роботи є вивчення пристроїв, які дозволяють при заданому періоді коливань ТК одержати співвідношення між Т1 і Т2. Ці пристрої – імпульсатори, підключені до виходу генератора, служать для деформування (зміщення, затягування, укорочення по передньому і задньому фронтах) пневматичних прямокутних коливань, складаються з реле і аперіодичних ланок. На рис.2.3, а, б, зображені схеми імпульсаторів, призначених

Рис.2.3, а
для вивчення в лабораторній роботі. Імпульсатор, зібраний по схемі, показаний на рис.2.3, а, зсовує як передній, так і задній фронт імпульсу поданого від генератора. Для скорочення заднього фронту імпульсу використовують імпульсатор, схема якого показана на рис.2.3, б.
Генератор прямокутних коливань, в якому передбачено регулювання верхнього і нижнього значень амплітуди, показана на рис.2.4. Він складається з елементів зрівняння (ЕЗ) 1, пневмодроселю 3, реле 4 і 6, пневмоємкості 8, ел. датчиків (на мал. не показані). При відсутності тиску живлення в системі,
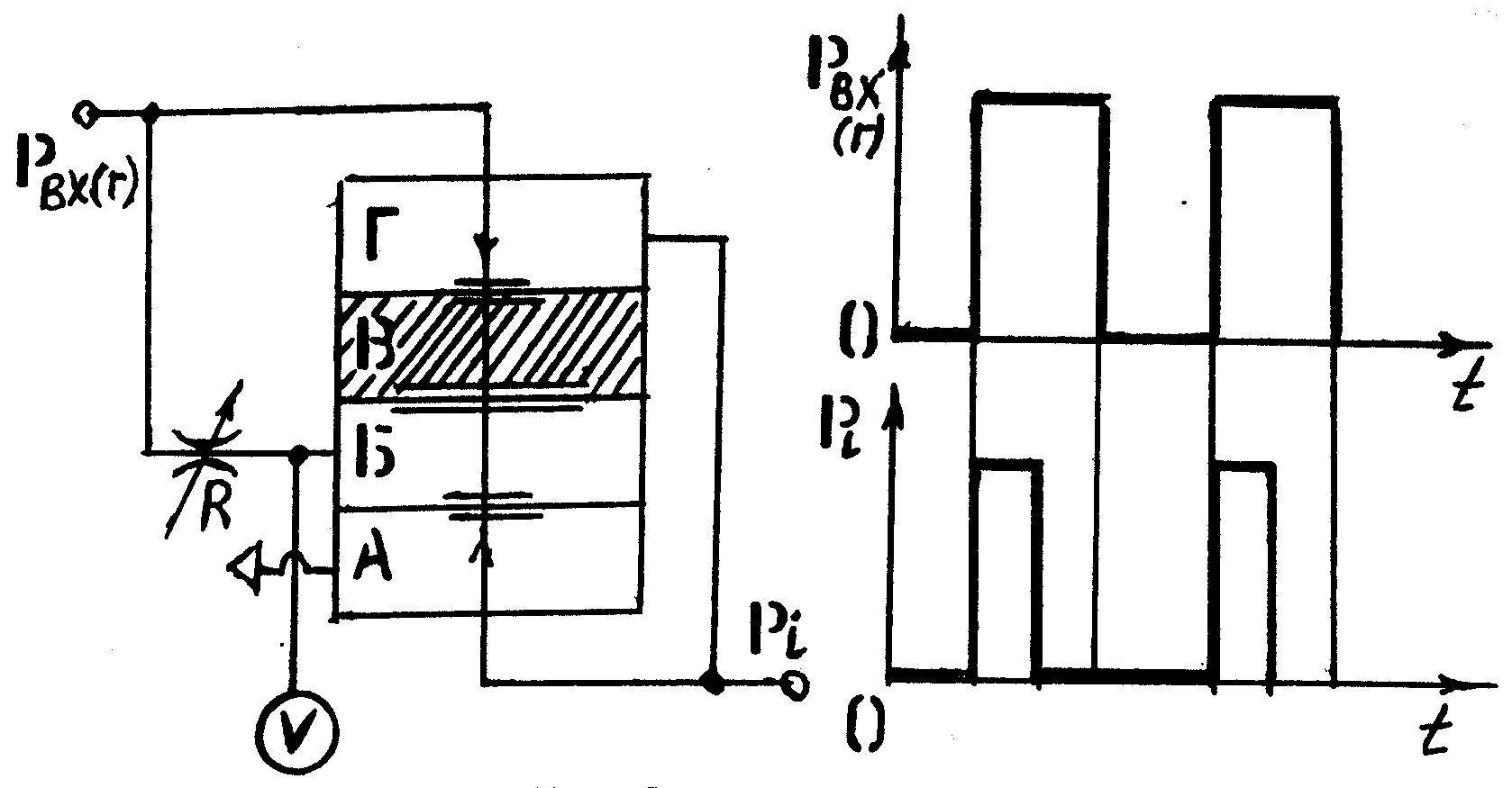
Рис.2.3, б

Рис.2.4.
мембранні блоки, пневмореле 4 і 6 знаходяться в верхньому положенні (за рахунок дії знизу підпорів), ЕЗ знаходиться в нейтральному положенні. При подачі живлення тиск Р3 від реле 6 надходить на ЕЗ і перекидає цей мембранний блок угору, відкриваючи шлях тиску РЖИВ до реле 4. Під дією цього тиску реле 4 перекидає нижнє сопло і замість Р3 на ЕЗ подається Р2. Так як Р2 < Р3 то положення жорсткого центру елементу 1 не змінюється; РЖИВ.2 крізь змінний дросель 3 надходить також в ємність і ЕЗ 1. Так як РЖИВ.2 > Р2 = Р3 то неминуче наступає момент, коли тиск в ємності перевищує Р2 і мембранний блок ЕЗ 1 переходить донизу. При цьому РЖИВ.1 буде перекрито, а повітря з лінії 2 іде в атмосферу крізь верхнє сопло ЕЗ 1. Під дією тиску підпору реле 4 перекриє РЖИВ.2 і повітря з лінії 5 іде в атмосферу крізь нижнє сопло цього реле.
В наслідок переміщення жорсткого центру реле 6 в лінію 7 поступає Р3 замість Р2. Повітря крізь дросель з ємності буде виходити в атмосферу до того часу, поки тиск в ємності не стане менш Р3. Після цього РЖИВ.1 надходить в лінію 2. РЖИВ.2 – в лінію 5 і т.д. цикл повторюється. Верхнє і нижнє значення амплітуди регулюється значенням тисків Р2 і Р3.
При
реалізації деяких пневматичних приборів
(наприклад – множувально-ділильних
пристроїв на пульсуючих пневмоопорах)
виникає необхідність в використанні
генераторів прямокутних коливань,
частота яких змінюється в залежності
від тиску Рупр.
Такий генератор можливо побудувати по
схемі показаній вище, замінивши змінний
дросель на керований значення якого
залежить від тиску Рупр.
Цей генератор можна роздивлятися як
перетворювач
![]() в частоту коливань.
в частоту коливань.
На рис.2.5 показана схема генератора такого типу. Він складається з ЕС 1, реле 2, дроселя 3 і пневмоємності 4.

Рис.2.5.
При підвищенні Рупр збільшується провідність опору тиску “сопло-заслінка”, а частота коливань збільшується.
Література: [1] стор.73-74; [3] стор.311-314; [7] стор.79-81.
Лекція 9. Пневматичні генератори зростаючих, спадаючих тисків та пилоподібних коливань на мембранних елементах.
На мембранних елементах УСЕППА можуть бути зібрані генератори, що дозволяють одержати коливання не тільки прямокутної форми. Роздивимось генератори зростаючих та спадаючих тисків, на базі яких збігаються генератори пилоподібних та гармонічних коливань. Такий генератор може бути зібраний на базі інтегруючого пристрою.
Пневматичний генератор безперервного та лінійно зростаючих тисків(рис.2.3).

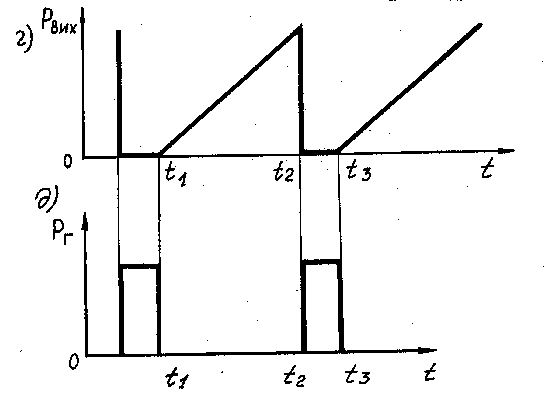
Рис.2.3. Схеми (а-в) і часові діаграми роботи (г-д) пневматичних генераторів безперервно-зростаючих тисків.
Складається
з пневмоємкості
![]() ,
пневмоопора
,
повторювача 3, управляє мого пневмоклапана
2, генератора прямокутних коливань 4 та
пристрою 1, що здійснює автоматичне
підтримування постійного перепаду
тиску на пневмоопорі
.
Пристрій 1 може бути спеціальним
повторювачем 3 з зсувом (рис.2.3,а),
повторювачем без зсуву (рис.2.3,б) двоходовим
підсилювачем.
,
пневмоопора
,
повторювача 3, управляє мого пневмоклапана
2, генератора прямокутних коливань 4 та
пристрою 1, що здійснює автоматичне
підтримування постійного перепаду
тиску на пневмоопорі
.
Пристрій 1 може бути спеціальним
повторювачем 3 з зсувом (рис.2.3,а),
повторювачем без зсуву (рис.2.3,б) двоходовим
підсилювачем.
Робота
генератора зростаючих тисків відбувається
таким чином (рис.2.3,г,д). В мить часу
,
коли сигнал прямокутних коливань
![]() від генератора дорівнює “0”, клапан 2
ізолює пневмоємкість
від атмосфери і в ній починає лінійно
зростати тиск до миті часу
.
Тиск в пневмоємкості повторюється за
допомогою повторювача 3.
від генератора дорівнює “0”, клапан 2
ізолює пневмоємкість
від атмосфери і в ній починає лінійно
зростати тиск до миті часу
.
Тиск в пневмоємкості повторюється за
допомогою повторювача 3.
В мить часу при появі імпульса тиску від генератора клапан 2 з’єднує пневмоємкість з атмосферою і тиск в пневмоємкості, а отже, і на виході схеми і тиск в пневмоємкості, а отже, і на виході схеми миттєво стає рівним “0”.
В мить
часу
![]() клапан 2 ізолює пневмоємкість
від атмосфери і усі процеси повторюються.
клапан 2 ізолює пневмоємкість
від атмосфери і усі процеси повторюються.
Принцип дії пристрою, що забезпечує лінійне зростання тиску, полягає у слідуючому. Складається ланцюг 3 постійного і управляє мого пневмоопору та пневмоємкості. На постійному опорі підтримується постійний перепад тиску при постійному тиску на вході. Крізь нього тече газ з постійними масовими витратами. Так як управляємий опір з’єднаний посліловно з постійним, то крізь нього тече та ж кількість газу. Постійний перепад тиску досягається автоматичним регулюванням за допомогою мембранного пристрою 1 провідності управляє мого пневмоопору. Т.ч., в кожну мить часу пневмоємкість поступає однакова кількість газу і тому зростання тиску і ній відбувається по лінійному закону.
Пневматичний генератор лінійно спадаючих тисків.
Побудований на базі
точного повторювача з зсувом. Він
відрізняється від генератора лінійно
зростаючих тисків місцем підключення
пневмоємкості. Але такий генератор має
значну не лінійність і може бути
використаний як генератор лінійно
спадаючих тисків тільки при невеликих
змінах вихідного тиску
![]() Точний генератор лінійно спадаючих
тисків виконують на базі двох входового
підсилювача (рис.2.4,а).
принцип його дії полячгає в слідуючому.
Створюється ланцюг, що складається з
послідовно включеної пневмоємкості
,
управляє мого
Точний генератор лінійно спадаючих
тисків виконують на базі двох входового
підсилювача (рис.2.4,а).
принцип його дії полячгає в слідуючому.
Створюється ланцюг, що складається з
послідовно включеної пневмоємкості
,
управляє мого
![]() і змінного
і змінного
![]() пневмоопорів.
Змінний опір з’єднаний з атмосферою.
В мить часу
(рис.2.4,б,в) при появі імпульсу від
генератора 1 пневмоємкість
за допомогою клапана 2 з’єднуються з
джерелом стабілізованого тиску. Тиск
в пневмоємкості
дорівнює
пневмоопорів.
Змінний опір з’єднаний з атмосферою.
В мить часу
(рис.2.4,б,в) при появі імпульсу від
генератора 1 пневмоємкість
за допомогою клапана 2 з’єднуються з
джерелом стабілізованого тиску. Тиск
в пневмоємкості
дорівнює
![]() .
Коли імпульс зникає (мить часу
),
повітря з пневмоємкості тече в атмосферу
крізь пневмоопори
і
.
За допомогою двохходового підсилювача
3 автоматично змінюється провідність
пневмоопора
є
ростійним. Останнє забезпечується
постійним атмосферним тиском і наявністю
тиску перед пневмоопором
,
що дорівнює тиску в пневмокамері
.
Коли імпульс зникає (мить часу
),
повітря з пневмоємкості тече в атмосферу
крізь пневмоопори
і
.
За допомогою двохходового підсилювача
3 автоматично змінюється провідність
пневмоопора
є
ростійним. Останнє забезпечується
постійним атмосферним тиском і наявністю
тиску перед пневмоопором
,
що дорівнює тиску в пневмокамері
![]() .
З умови рівноваги двохходового підсилювача
тиск
.
З умови рівноваги двохходового підсилювача
тиск
![]() в пневмокамері
повинен дорівнювати тиску
в пневмокамері
повинен дорівнювати тиску
![]() в камері
в камері
![]() ,
який підтримується постійним і рівним
,
який підтримується постійним і рівним
![]() .
Постійність перепаду тиску на опорі
при постійному тиску на його виході
означає і постійність масових витрат
газу крізь нього.
.
Постійність перепаду тиску на опорі
при постійному тиску на його виході
означає і постійність масових витрат
газу крізь нього.
Таким чином, в кожну
мить часу крізь опір
з пневмоємкості
тече одна і та ж кількість газу, що і
дозволяє лінійно зменшувати тиск в
пневмоємкості. Повторював 4 забезпечує
розв’язку схеми з навантаженням. Цей
пристрій реалізує залежність
![]() При
При
![]() після інтегрування одержимо:
після інтегрування одержимо:

звідки
![]() (1.59)
(1.59)
Початковий
рівень тиску
може бути яким завгодно. Спадання тиску
може відбуватися до атмосферного або
будь-якого стабілізованого значення
![]() ,
але при цьому лінійний закон буде
виконуватися при умові
,
але при цьому лінійний закон буде
виконуватися при умові
![]()


Рис.2.4. Схема і часові діаграми роботи (б,в) пневматичного генератора безперервно зникаючих тисків.
Пневматичний генератор симетричних пилоподібних коливань.
Може
бути побудований на базі пневматичних
генераторів лінійно-зростаючих та
лінійно спадаючих коливань (рис.2.5,а).
генератор складається з генератора 2
лінійно-зростаючих тисків і генератора
1 лінійно-спадаючих тисків, з’єднаних
клапанами 3 і 4 з пневмокамерою
![]() .
Сигнал з пневмоємкості подається в
повторював 5 і елементи зрівняння 6 і 7,
що являють собою двохходові підсилювачі.
Елементи зрівняння управляють тригером
8 з разокремленими входами. Робить
генератор таким чином(рис.2.5,б). Поки діє
генератор 2, сигнал
.
Сигнал з пневмоємкості подається в
повторював 5 і елементи зрівняння 6 і 7,
що являють собою двохходові підсилювачі.
Елементи зрівняння управляють тригером
8 з разокремленими входами. Робить
генератор таким чином(рис.2.5,б). Поки діє
генератор 2, сигнал
![]() на виході тригера дорівнює “0” і тиск
на виході тригера дорівнює “0” і тиск
![]() в ємності
зростає.
Як тільки тиск
досягає заданого верхнього рівня
в ємності
зростає.
Як тільки тиск
досягає заданого верхнього рівня
![]() ,
на виході елемента зрівняння 6 з’являється
сигнал, що дорівнює “1”, який перекидає
тригер в другий стан, і сигнал
на виході тригера стає також рівним
“1”. При цьому за допомогою клапана 3
від’єднується від пневмоємкості
генератора 2 і до неї за допомогою клапана
4 з’єднується генератор 1. Тиск в
пневмоємкості і на виході генератора
починає спадати, як тільки значення
тиску
досягає заданого нижнього рівня
,
на виході елемента зрівняння 6 з’являється
сигнал, що дорівнює “1”, який перекидає
тригер в другий стан, і сигнал
на виході тригера стає також рівним
“1”. При цьому за допомогою клапана 3
від’єднується від пневмоємкості
генератора 2 і до неї за допомогою клапана
4 з’єднується генератор 1. Тиск в
пневмоємкості і на виході генератора
починає спадати, як тільки значення
тиску
досягає заданого нижнього рівня
![]() і на виході елемента зрівняння 7 з’явиться
сигнал, що дорівнює “1”, який перекидає
тригер в ісходнє положення. При цьому
до пневмоємкості за допомогою клапана
3 приєднується генератор 2 і від неї за
допомогою клапана 4 відключається
генератор 1. тиск на виході і в пневмоємкості
знову збільшується. Далі усі процеси
повторюються і на виході генератора
встановлюються пилоподібні коливання.
і на виході елемента зрівняння 7 з’явиться
сигнал, що дорівнює “1”, який перекидає
тригер в ісходнє положення. При цьому
до пневмоємкості за допомогою клапана
3 приєднується генератор 2 і від неї за
допомогою клапана 4 відключається
генератор 1. тиск на виході і в пневмоємкості
знову збільшується. Далі усі процеси
повторюються і на виході генератора
встановлюються пилоподібні коливання.
Пневматичний генератор симетричних пилоподібних коливань може бути побудований також на базі пневматичного інтегруючого пристрою(рис.2.5,в). Він складається з генератора прямокутних коливань, зібраного на двохходовому підсилювачі та пневматичного інтегратора. Ці два пристрої включені послідовно і обхвачені заперечним зв’язком.

Рис.2.5.
Література: [3],стор.317-325; [7],стор.82-84.
Лекція 10. Струменевий аеродинамічний генератор коливань. Генератор
коливань, що використовує в роботі явище турбулізації ламінарного струменя. Кільцевий генератор коливань.
Для створення струменевих генераторів коливань використовують фізичні явища, що супроводжуються виникненням акустичних коливань.
Схема
струменевого генератора коливань,
побудованого
на базі стременного пристрою пам’яті,
який робить на ефекті відхилення
струменя, показана на рис.2.6,а. Струменевий
пристрій пам’яті має два стійких стани,
що визначаються сигналами
![]() і
і
![]() .
Генератор робить таким чином.
.
Генератор робить таким чином.
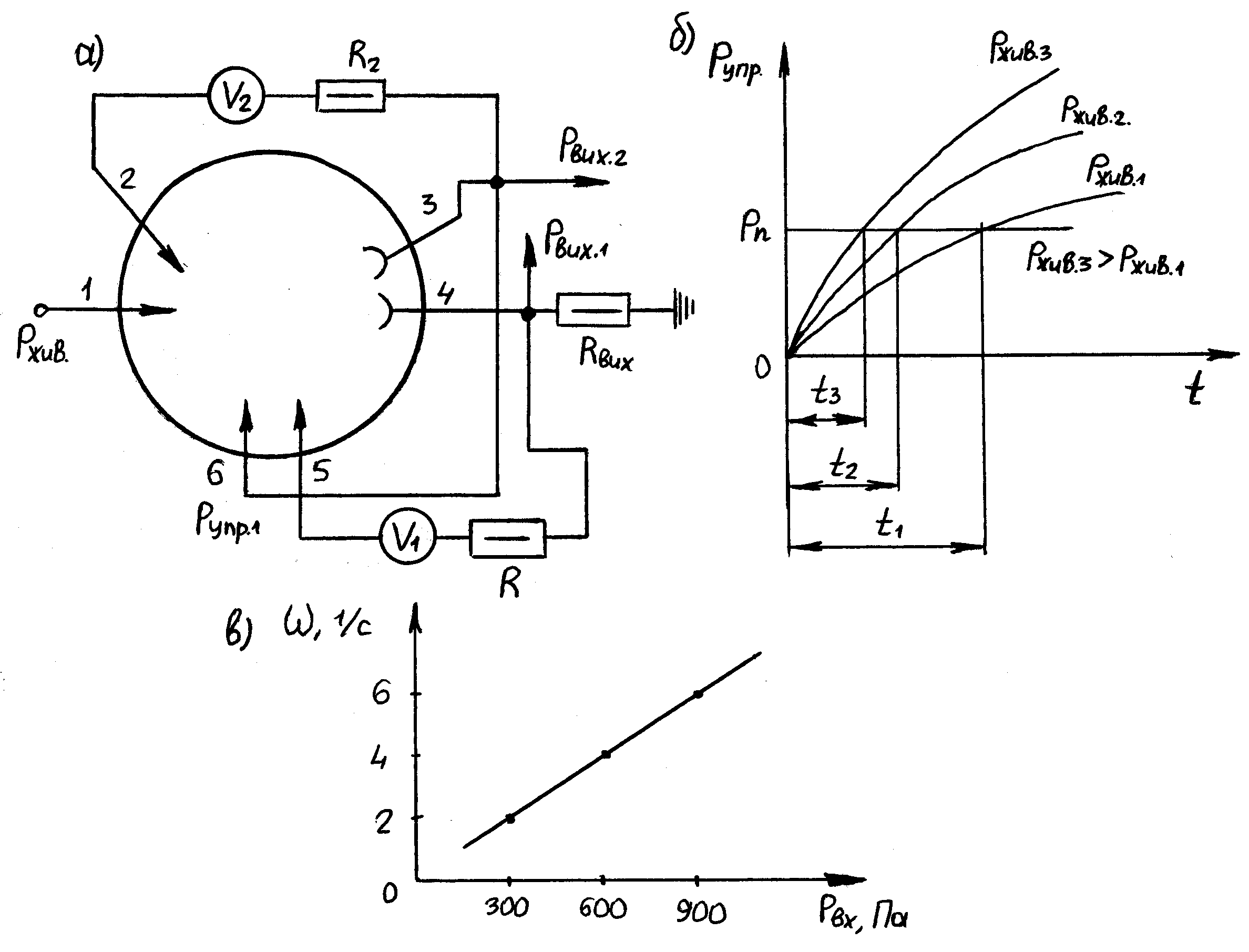
Рис.2.6. Схема (а) та характеристики (б, в) струменевого генератора коливань.
Струмінь
повітря, що поступає з каналу живлення
1, проходить до вихідного каналу 4, де
створюється тиск
.
Через деякий інтервал часу, який залежить
від об’єму пневмоємкості
![]() і опорів
і опорів
![]() та
та![]() ,
тиск в пневмоємкості
і в каналі 5 збільшується до значення
,
тиск в пневмоємкості
і в каналі 5 збільшується до значення
![]() ,
що достатньо для відхилення основного
струменя і переключення її в канал 3. В
результаті тиск в каналі 3 збільшується
і стає рівним
.
При цьому зростає тиск в каналі 3 і в
пневмоємкості
,
що достатньо для відхилення основного
струменя і переключення її в канал 3. В
результаті тиск в каналі 3 збільшується
і стає рівним
.
При цьому зростає тиск в каналі 3 і в
пневмоємкості
![]() і через деякий інтервал часу, що
визначається пневмоємкістю
і
провідністю опору
і через деякий інтервал часу, що
визначається пневмоємкістю
і
провідністю опору
![]() ,
в пневмоєкості
і в каналі 2 буде тиск
,
достатній для переключення основного
струменя з каналу 3 канал 4. Далі цей цикл
повторюється періодично. Струмінь, що
тече з каналу 6, стабілізує основний
струмінь при його переключенні в канал
3. Особливість генератора – можливість
змінювати частоту коливань тиску на
його виході як шляхом зміни провідностей
пневмоопорів
і
,
пневмоємкостей
і
,
так і шляхом зміни тиску
,
в пневмоєкості
і в каналі 2 буде тиск
,
достатній для переключення основного
струменя з каналу 3 канал 4. Далі цей цикл
повторюється періодично. Струмінь, що
тече з каналу 6, стабілізує основний
струмінь при його переключенні в канал
3. Особливість генератора – можливість
змінювати частоту коливань тиску на
його виході як шляхом зміни провідностей
пневмоопорів
і
,
пневмоємкостей
і
,
так і шляхом зміни тиску![]() .
Останні обставини дозволяють
використовувати генератор для створення
перетворювачів тиску в частоту.
.
Останні обставини дозволяють
використовувати генератор для створення
перетворювачів тиску в частоту.
На
рис.2.6,б показаний графік зростання
тиску в пневмоємкості при різних тисках
живлення. При збільшенні тиску живлення
необхідно все менше і менше часу для
накопичування в пневмоємкості тиску
![]() .
Тому частота переключення струменя з
каналу 3 в канал 4 з збільшенням
збільшується.
Залежність частоти коливань на виходах
і
,
від тиску живлення
.
Тому частота переключення струменя з
каналу 3 в канал 4 з збільшенням
збільшується.
Залежність частоти коливань на виходах
і
,
від тиску живлення
![]() показана на рис.2.6,в. Вона (з похибкою
показана на рис.2.6,в. Вона (з похибкою
![]() )
практично лінійна.
)
практично лінійна.
Схема генератора коливань, що використовує в роботі явище турбулізації ламінарного струменя. Показана на рис.2.7,а. Генератор являє собою турбулентний
підсилювач з зворотнім зв’язком. Він робить таким чином. Ламінарний струмінь з сопла 1 поступає в канал 2 і в ланцюг зворотного зв’язку 3, яка являє собою або з’єднання пневмоопора пневмоємкістю, або довгу лінію. Сигнал тиску з ланцюга зворотного зв’язку формує струмінь і управляючому каналі 4, що викликає турбулізацію ламінарного струменя, яка тече з каналу 1 і падіння тиску в каналі 2, а потім і в ланцюзі зворотного зв’язку. Після того як тиск в управляючому каналі зменшується до порогового значення, силовий струмінь стає знову ламінарним. Частота пневматичних коливань, що виникає в такому присрої залежить від параметрів ланцюга зворотного зв’язку(наприклад від довжини в каналі зворотного зв’язку) і в тиску живлення(рис.2.7,б,в). Форма коливань генератора при частоті менше 50Гц – прямокутна, при частоті 50-150Гц – трапецеїдальна і при частоті 150-300Гц близька до синусоїдальної. Частота коливань генератора:
![]() , (2.1)
, (2.1)
де
![]() - густина газу;
- густина газу;
![]() - постійний коефіцієнт, що залежить від
параметрів ланцюга зворотного зв’язку.
- постійний коефіцієнт, що залежить від
параметрів ланцюга зворотного зв’язку.
Зокрема показаних вище струменевих генераторів коливань, що побудована на базі струменевих підсилювачів та інших елементів, в пневмоавтоматиці використовують аеродинамічні пристрої, які призначені для формування пневматичних коливань.
На рис.2.8,а показана схема кільцевого генератора коливань. Генератор має вісесемитричне кільцеве сопло, яке створене циліндричним стержнем 1 і трубкою 2 і резоніруючу камеру 3 з конічним розширювачем 4. струмінь з кільцевого сопла попадає в камеру 3, частина струменя відбивається від стінки розширювача 4, що

Рис.2.7. Схема (а) та характеристики (б, в) пневматичного генератора на турбулентному підсилювачі.
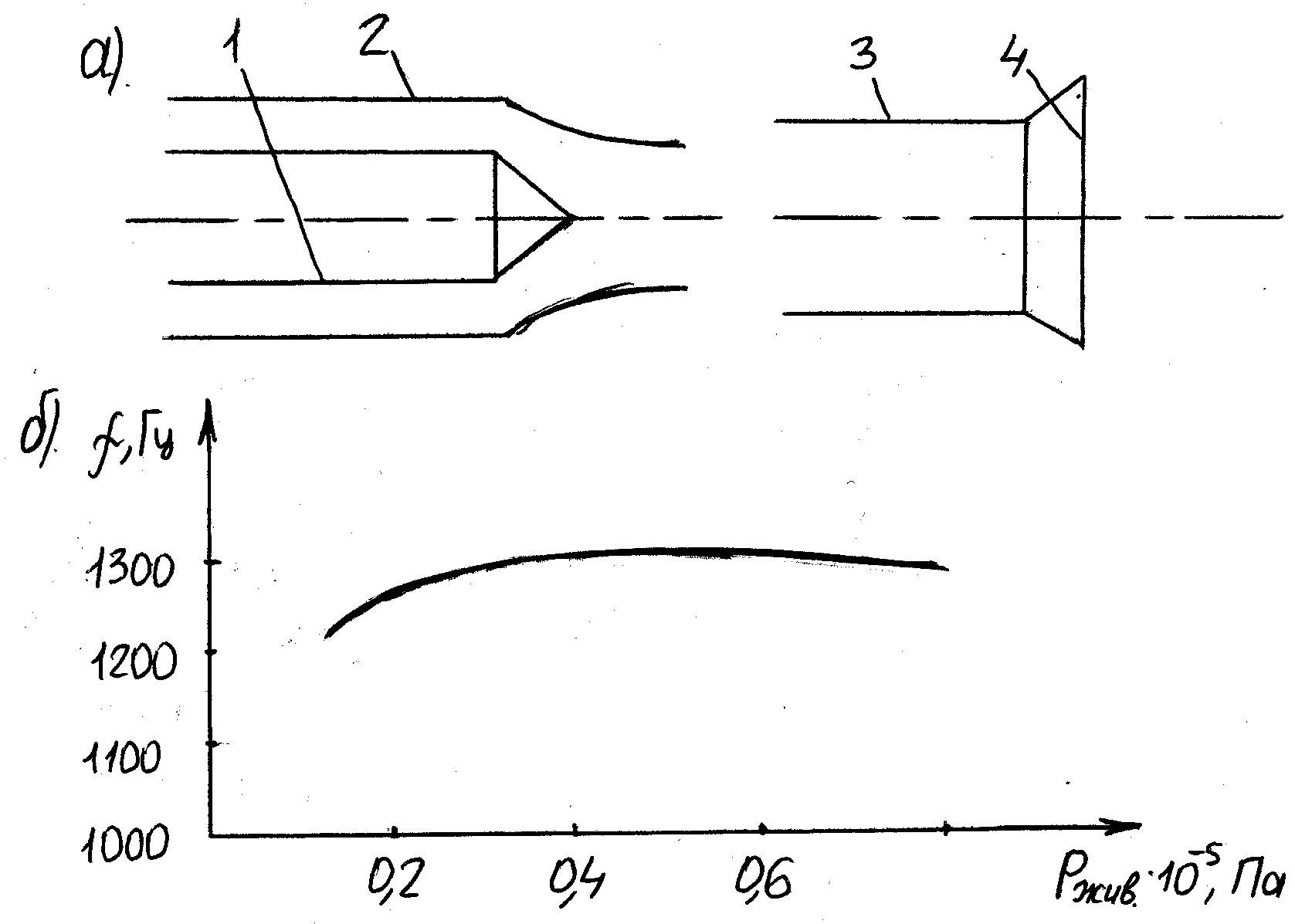
Рис.2.8. Схема (а) і характеристика (б) кільцевого пневматичного генератора коливань.
викликає появу зворотного зв’язку, яка періодично змінює опір кільцевого сопла та діаметр кільцевого потоку. Якщо сопло розташоване на деякій відстані від камери 3, частота коливань генератора залежить від довжини і об’єму резонатора, а також від в’язкості газу. Тиск живлення при цьому мало впливає на частоту коливань(рис.2.8,б). При безпосередній близькості сопла і резонатора виникають коливання звукового або ультразвукового діапазону.
Література: [2],стор. 157-159; [3], стор. 325-332.
Розділ 3.Пневматичні засоби та системи контролю та керування технологічними процесами.