

Содержание:
IP (2,3) = 0; 11
2) £Р( 1) = 0, 15
Ру 1292,6 ав = — = = 58,7 мм 15
Определяем размеры и массу маховика. 20
исследования
Таблица №1
Наименование |
Обозначение |
Величина |
Обозначение |
параметра |
параметра |
|
единицы |
Длина кривошипа OA |
1<ЭА |
0,073 |
м |
Отношение длины шатуна АВ к |
А |
4,3 |
|
длине кривошипа OA |
|
|
|
Масса кривошипа OA |
т1 |
2,2 |
кг |
Масса шатуна АВ |
т2 |
3,0 |
кг |
Масса поршня |
т3 |
4,2 |
кг |
Диаметр цилиндра |
D |
0,13 |
м |
Угловая скорость вращения |
(л)1 |
90 |
с1 |
кривошипа |
|
|
|
Момент инерции кривошипа OA |
Ysi |
0,0035 |
кг • м2 |
Момент инерции шатуна АВ |
YS2 |
0,03 |
кг ■ м2 |
Коэффициент неравномерности |
6 |
0,1 |
|
движения механизма |
|
|
|
Максимальная сила давления |
Р max |
1,4 |
МПа |
раствора на поршень |
|
|
|
Планы ускорений строим для положения №7 механизма. Силовой расчет провести для положения № 7 механизма.
Положение точки S2 находится из условия AS2 = 0,4 АВ
2. Определение основных размеров механизма 2.1 Структурное исследование рычажного механизма.
Определяем степень подвижности механизма по формуле П.Л.Чебышева. W = Зп - 2 рБ — р4 ,
где п = 3 - число подвижных звеньев ;
р5 = 4 - число кинематических пар пятого класса;
р4 = 0 - число кинематических пар четвертого класса;
Подставляем эти данные в формулу Чебышева и находим.
W = 3 • 3-2-4-0 =1 ,
Определим класс и порядок механизма. Для этого расчленим механизм на группы Ассура. Он состоит из группы Ассура II класса, 2-го вида, 2-го порядка и механизм I класса, состоящего из входного звена и стойки. р5
/✓✓///// / /
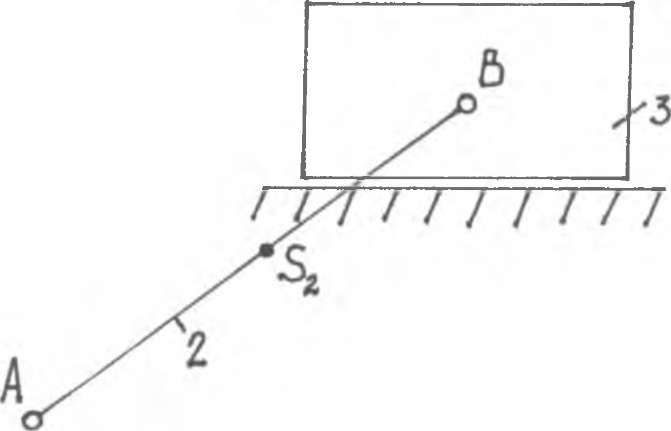
2.2 Определение основных размеров механизма
Используя формулу 1Ав = 1оа • Я и исходные данные, определяем длины кривошипа OA и шатуна АВ.
Натуральная длина кривошипа
15 • VB(cv) 15 • 4,2
10А = госглл ~ - 0,073 М
7^(860) 860
Длина шатуна 1АВ =10А • Я = 0,073 • 4,3 = 0,314 м Максимальная длина механизма L = 2Iqa+Iab = 2 • 0,073 + 0,314 = 0,46 м
L о 46
Масштаб длин Ui = = -rjrp- = 0,00115 м /мм

02.3 Построение схемы механизма
Принимаем масштаб = 0.00115 м / мм
В принятом масштабе вычерчиваем схему механизма. Для построения 8 положений звеньев механизма разделим траекторию, описываемою точкой А кривошипа OA, на 8 равных частей. За нулевое принимаем то положение кривошипа OA, при котором точка В занимает крайнее правое
положение. Из отмеченных на окружности точек А0, A-i А7
раствором циркуля, равным 250 мм.
Чертежная длина кривошипа
OA = 10А / щ = 0,073 / 0,00115 = 63 мм
Чертежная длина шатуна
АВ = 1ав/ц1 = 0,314/0,00115 = 274 мм
AS2= 0,4 АВ = 0,4 • 274 = 110 мм
Намечаем на линии движения ползуна точки В0) Bi, В2 В7;
соединяем прямыми точки А0 с В0 и т.д. , получаем 8 положений звеньев механизма.
3. Построение планов скоростей и ускорений механизма
3.1 Построение планов скоростей механизма.
Построение начинаем от входного звена, т.е. кривошипа OA.
Из точки р, принятой за полюс плана скоростей , откладываем в направлении вращения кривошипа OA вектор скорости точки А : ра = 100мм.
Построение плана скоростей группы Ассура II класса 2-го вида производим по уравнению:
Vb=Va+Vba
где VA - скорость точки А кривошипа OA. Её величина равна С01 = лпх / 30 = 3,14 • 860 / 30 = 90 с1
VA= (х)1 • l0A = 90 • 0,073 = 6,57 м/с VBa - скорость точки В звена 2 во вращательном движении относительно точки А направлена перпендикулярно оси звена АВ;
VB - скорость точки В ползуна 3, направлена вдоль оси ОВ. Из точки А проводим линию, перпендикулярную оси звена АВ,
а из полюса р плана скоростей - линию, параллельную оси ОВ. Точка в пересечения этих линий даёт конец вектора искомой скорости Vb.
Масштаб планов скоростей вычисляем по формуле
V л 6,57
uv = = = 0,0657 (м/с)/мм.
• v pa ЮО
Истинное значение скорости каждой точки находим по формулам:
VB= \iv • ре , Vba = V-v' ав . vs2 = hv • ps2 Определим угловые скорости шатуна АВ для 8 положений (л)АВ = (л)2 = Vba/IAB = 4,73/0,314 = 15,0 с"7
Т2= 0,5 ( m2Vs : + Ys2 + тзУв ) YS2 = 0,1 т2 • 12ав
Направление угловой скорости звена АВ определяем следующим образом. Переносим (мысленно) вектор ВА с плана скоростей в точку В шатуна АВ кривошипно-ползунного механизма и наблюдаем направление поворота звена АВ вокруг точки А.
Все полученные значения сводим в таблицу 2.
|
Таблица 2 Значение скоростей точек кривошипно-ползунного механизма в м/с № полож. |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
VBA |
6,59 |
4,73 |
0 |
4,73 |
6,59 |
4,73 |
0 |
4,73 |
6,59 |
|
21,0 |
15,0 |
0 |
15,0 |
21,0 |
15,0 |
0 |
15,0 |
21,0 |
Vb |
0 |
5,45 |
6,57 |
3,88 |
0 |
3,88 |
6,57 |
5,45 |
0 |
Vs2 |
3,88 |
5,45 |
6,57 |
5,1 |
3,88 |
5,1 |
6,57 |
5,45 |
3,88 |
Т2 |
58,39 |
220,61 |
310,78 |
148,0 |
58,39 |
148,0 |
310,78 |
220,61 |
58,39 |
3.2 Построение плана ускорений механизма
Построение плана ускорений рассмотрим для 3-го положения механизма (лист 1). Так как кривошип OA вращается с постоянной угловой скоростью о>1 = 83,7 рад/с, то точка А звена АО будет иметь только нормальное ускорение, величина которого равна
aA=a)\ - l0A = 902 • 0,073 = 591,3 м/с2 Определяем масштаб плана ускорений.
\ia =аА / па = 591,3 / 100 = 5,913 (м/с2)/мм, где па = 100 мм - длина отрезка, изображающего на плане
ускорений вектор нормального ускорения точки А кривошипа OA.
Из произвольной точки 7Г - полюса плана ускорений проводим вектор тта параллельно звену OA от точки А к точке О. Построение плана ускорений группы Ассура II класса 2-го вида (звенья 2 и 3) проводим согласно уравнения
ав — аА + аАВ + аВА
II OX II АО \\ВА 1 АВ где ав - ускорение ползуна 3, направлено вдоль оси ОВ;
аАв " нормальное ускорение точки В шатуна АВ при вращении его вокруг точки А, направленно вдоль оси звена АВ от точки В0 к точке ад.
аАВ = (л>2 • 1АВ = 15,02-0,314 = 70,6 м/с2 Его масштабная величина, равна:
an - аГАв/11А= 70,6/5,913 = 11,9 мм.
атВА- касательное ускорение точки В шатуна АВ при вращении его вокруг точки А (величина известная) направленно перпендикулярно к оси звена АВ.
Через конец вектора пВА проводим прямую, перпендикулярную к оси звена ВА произвольной длины. Из полюса 71 проводим прямую, параллельную оси ОВ. Точка в пересечения этих прямых определит концы векторов пв и тВА. Складывая векторы пВА и тВА, получаем полное ускорение звена АВ, для этого соединяем точки а ив прямой. Точку S2 на плане ускорений находим по правилу подобия, пользуясь соотношением отрезков. Так как AS2 = 0,4АВ, то и as2 = 0,4ав. Соединяем точку S2 с полюсом п.
Численные значения ускорений точек В, S2, а также касательное ускорение атВА найдём по формулам:
ав = пв ■ \iA = 73 • 5,913 = 431,6 м/с2
aS2 = ns2 • ЦА= 83 ■ 5,913 = 490,8 м/с2
afA — пв • [iA— 69-5,913 = 408 м/с2 Определяем величину углового ускорения звена АВ:
f 2 = О-ва 1 1ав = 408 1 °-314 = 1299,- с2
Определяем направление углового ускорения звена АВ. Для этого мысленно переносим вектор тВА в точку Во. Считая точку А0 неподвижной, замечаем, что поворот звена АВ будет против часовой стрелки.
«л |
71 аАВ |
аВА |
|
ав |
0-S2 |
591,3 |
70,6 |
408 |
1299,4 |
431,6 |
490,8 |