3.3. Геометрическая интерпретация задачи линейной оптимизации
Задана математическая модель:
![]() ,
(3.19)
,
(3.19)
(3.20)
, . (3.21)
Каждое из неравенств системы ограничений (3.20) и (3.21) является полупространством с граничными гиперплоскостями
![]() ,
(
,
(![]() ),
),
![]() ,
(
,
(![]() .
.
Пересечение полупространств, заданных системой ограничений, если она совместна, будет выпуклым многогранником, который образует область допустимых решений (ОДР) системы ограничений.
Любая внутренняя и граничная точка ОДР является решением задачи. Приравняем функцию (3.19) к нулю, тогда уравнение
![]()
представляет собой гиперплоскость, проходящую через начало координат и перпендикулярную вектору-градиенту. Направление вектора-градиента показывает направление возрастания функции. Поэтому, чтобы найти максимум функции, нужно передвигать гиперплоскость в направлении вектора как можно дальше от начала координат, но чтобы она имела с ОДР хотя бы одну общую точку. Чтобы найти минимум функции, нужно определить ближайшую точку в ОДР от начала координат.
Для двумерного пространства на рис. 3.1 показано, что в угловой точке А максимальное значение функции, а в точке В - минимальное.
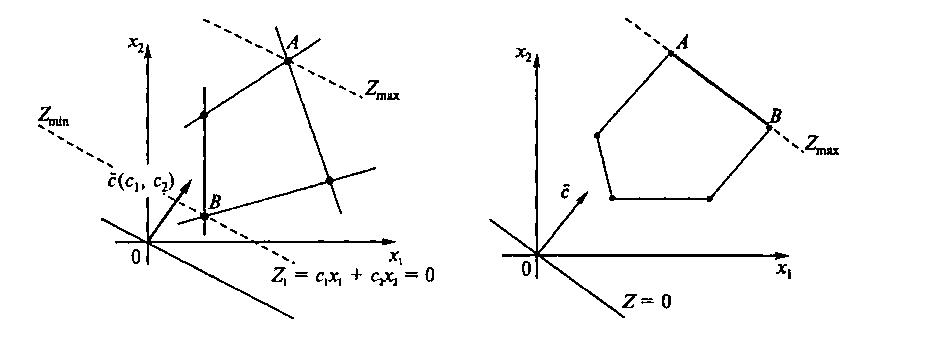
Рис.3.1. Область допустимых решений задачи с максимальным и минимальным значениями в угловых точках
Рис. 3.2. Область допустимых решений задачи с множеством решений
Рис. 3.2 отражает случай, когда прямая функции параллельна отрезку АВ, принадлежащему ОДР. Максимум функции 2 достигается в точке А и в точке В, следовательно, и в любой точке отрезка АВ, так как эти точки могут быть выражены в виде линейной комбинации угловых точек А и В.
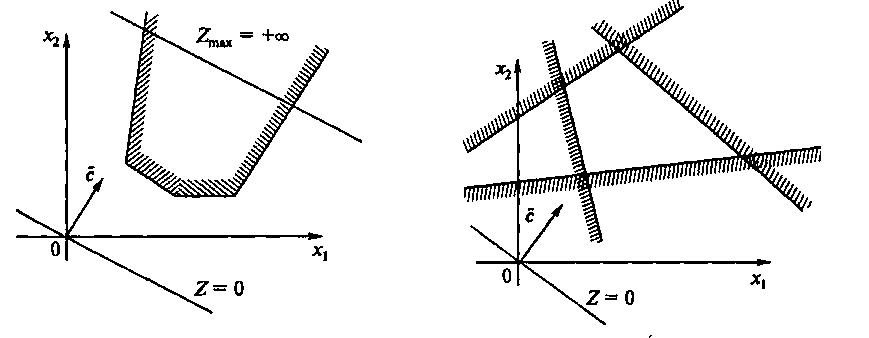
Рис. 3.3. Множество, неограниченное сверху
На рис. 3.3 изображен вариант, когда система ограничений образует неограниченное сверху множество. Функция z при этом стремится к бесконечности, так как прямую функции можно передвигать в направлении вектора градиента как угодно далеко.
На рис. 3.4 представлен случай несовместной системы ограничений.
Рис. 3.4. Несовместная система ограничений
Пример решения лабораторной работы №1
Задание.
Построить на плоскости область решений
линейных неравенств
![]()
и геометрически
найти максимальное
и минимальное
значения
целевой функции
![]() в этой области. (Все решения должны
быть неотрицательными, т.е.
в этой области. (Все решения должны
быть неотрицательными, т.е.
![]() ,
,
![]() ).
).
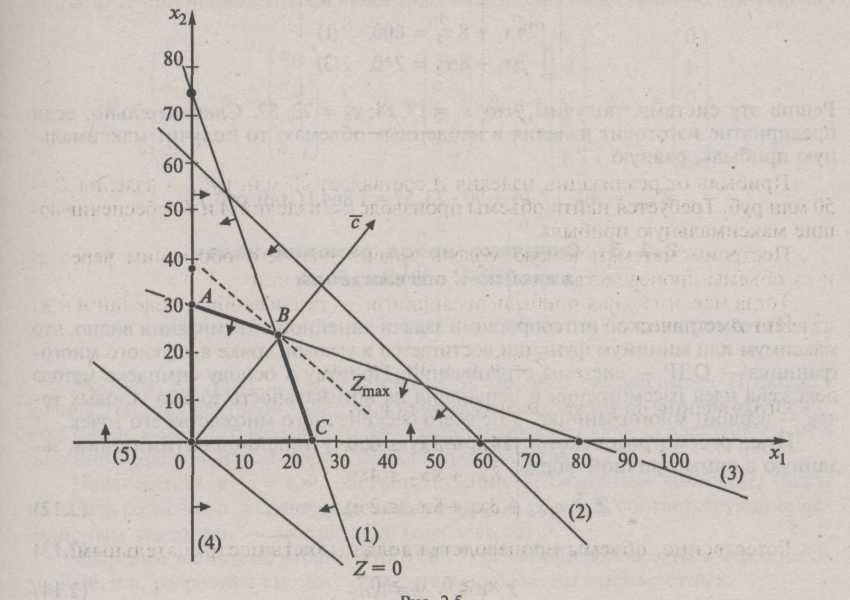
Решение.
Решение сформулированной задачи найдем, используя геометрическую интерпретацию. Определим сначала многоугольник решений, для чего систему ограничений-неравенств запишем в виде уравнений и пронумеруем их:
![]()
![]()
Каждое из записанных уравнений представляет собой прямую на плоскости, причем 4-я и 5-я прямые являются координатными осями.
Чтобы построить
первую прямую, найдем точки ее пересечения
с осями координат: при
=0,
![]() =75,
а при
=0,
=25.
Далее нас интересует, по какую сторону
от прямой будет находиться полуплоскость,
соответствующая первому неравенству.
Чтобы определить искомую полуплоскость,
возьмем любую точку на плоскости, не
лежащую на прямой, например, точку
=75,
а при
=0,
=25.
Далее нас интересует, по какую сторону
от прямой будет находиться полуплоскость,
соответствующая первому неравенству.
Чтобы определить искомую полуплоскость,
возьмем любую точку на плоскости, не
лежащую на прямой, например, точку
![]() и подставим ее координаты в неравенство
- оно является верным. Так как точка
О(0,0)
лежит левее первой прямой, то и
полуплоскость будет находиться левее
прямой 24
+8
=600.
На рисунке расположение полуплоскости
относительно первой прямой отмечено
стрелками.
и подставим ее координаты в неравенство
- оно является верным. Так как точка
О(0,0)
лежит левее первой прямой, то и
полуплоскость будет находиться левее
прямой 24
+8
=600.
На рисунке расположение полуплоскости
относительно первой прямой отмечено
стрелками.
Аналогично построены
2-я и 3-я прямые и найдены полуплоскости,
соответствующие 2-му и 3-му неравенствам.
Точки, удовлетворяющие ограничениям
,
![]() ,
находятся в первом квадранте.
,
находятся в первом квадранте.
Множество точек, удовлетворяющих всем ограничениям одновременно, является областью допустимых решений системы ограничений. На графике это многоугольник ОАВС.