

2. Методы расчета нелинейных электрических и магнитных цепей
Рассмотрим основные методы расчета установившихся режимов в нелинейных электрических цепях, которые в свою очередь могут делиться на другие методы, а также применяться в сочетании.
Применение методов расчета, а также их модификации будут рассмотрены ниже при расчете нелинейных цепей постоянного тока, магнитных цепей и нелинейных цепей переменного тока.
Основные методы расчета нелинейных электрических и магнитных цепей можно разбить на три группы:
1. Графические методы расчета.
2. Аналитические методы расчета.
3. Моделирование.
Рассмотрим более подробно суть указанных методов.
2.1. Графические методы расчета
Применяются для расчета простых нелинейных электрических цепей, содержащих, как правило, однотипные элементы.
Основаны на графическом решении нелинейных алгебраических уравнений. Решение получают на плоскости (х, y), в которой аргумент х и функция у, по мере решения системы уравнений, могут меняться местами.
Например,
аргумент х
и функции
![]() и
и
![]() не зависят от времени (постоянный ток)
и решаемое нелинейное алгебраическое
уравнение имеет вид
не зависят от времени (постоянный ток)
и решаемое нелинейное алгебраическое
уравнение имеет вид
![]() ,
(2.1)
,
(2.1)
здесь
![]() и
и
![]() - нелинейные зависимости, заданные в
виде графиков, рис.2.1;
- нелинейные зависимости, заданные в
виде графиков, рис.2.1;
![]() - константа.
- константа.
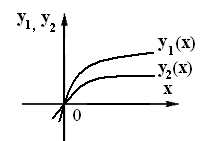
Рис. 2.1
При решении уравнения (2.1) можно применить два метода: метод преобразования и метод пересечения характеристик.
Рассмотрим каждый метод.
Метод преобразования характеристик основан на том, что, согласно (2.1), строится результирующая функция
![]()
того
же аргумента, рис.2.2, по которой при
заданном значении правой части уравнения
(2.1)
![]() находим значение аргумента
находим значение аргумента
![]() и по графикам
и по графикам
![]() и
и
![]() значения функции
значения функции
![]() и
и
![]() .
.
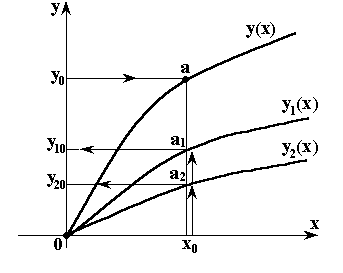
Рис. 2.2
На
рис.2.2, после построения зависимости
![]() ,
стрелками показано решение уравнения
(2.1), т.е. реализован следующий алгоритм:
,
стрелками показано решение уравнения
(2.1), т.е. реализован следующий алгоритм:
![]()

![]() (2.2)
(2.2)
![]()
 .
.
Метод пересечения характеристик основан на построении двух графиков – левой и правой частей уравнения (2.2). Точка пересечения этих графиков будет решением уравнения. Допустим, уравнение (2.1) можно представить в виде
![]() . (2.3)
. (2.3)
На
рис.2.3 показано решение уравнения (2.3)
как точка
![]() пересечения двух графиков
и
пересечения двух графиков
и
![]() .
Стрелками показан алгоритм нахождения
требуемых величин
.
Стрелками показан алгоритм нахождения
требуемых величин
![]() и
и
![]() :
:
![]() . (2.4)
. (2.4)
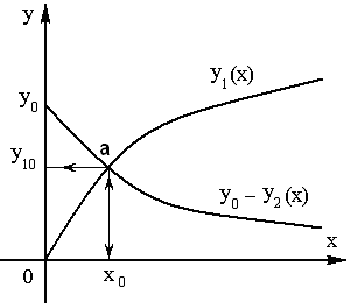
Рис. 2.3
Рассмотрим графический метод расчета, когда аргумент и функция (функции) зависят от времени t.
Решим графически уравнение
![]() ,
,
или (2.5)
![]() ,
,
где
и
![]() - нелинейные зависимости, симметричные
относительно начала координат,
представленные на рис. 2.4;
- нелинейные зависимости, симметричные
относительно начала координат,
представленные на рис. 2.4;
![]() -
заданная периодическая функция времени
-
заданная периодическая функция времени
![]() ,
здесь Т
– период.
,
здесь Т
– период.
Для решения уравнения (2.5) воспользуемся методом преобразования:
- найдем графически результирующую характеристику, согласно (2.5), как , рис. 2.4;
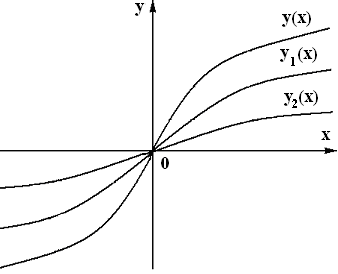
Рис. 2.4
- по заданной функции , рис.2.5а, устанавливающей связь
![]() (2.6)
(2.6)
между
временем
![]() и
аргументом
и
аргументом
![]() ,
находим графически зависимость
,
находим графически зависимость
![]() по следующему алгоритму:
по следующему алгоритму:
![]() , (2.7)
, (2.7)
где
![]() - дискретное значение времени на интервале
- дискретное значение времени на интервале
![]() ,
,
![]() ,
рис. 2.5.
,
рис. 2.5.
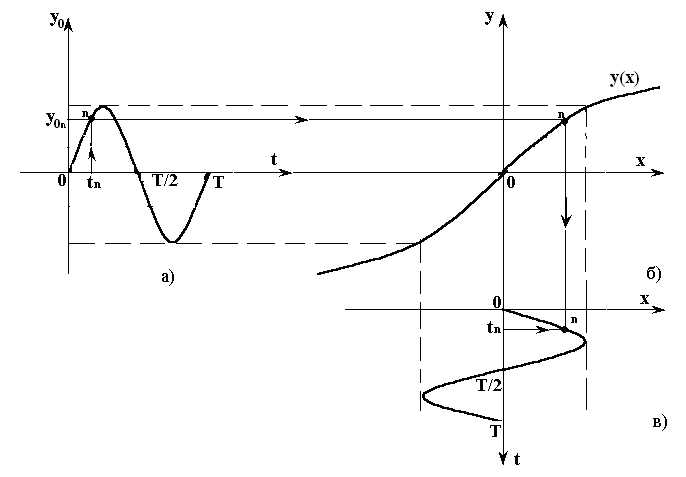
Рис. 2.5
При
этом масштабы по осям
![]() и
на соответствующих рисунках 2.5
и
и
на соответствующих рисунках 2.5
и
![]() ,
и
,
и
![]() выбирают
обычно одинаковыми;
выбирают
обычно одинаковыми;
-
по полученному графику
строим графические зависимости
![]() и
и
![]() ,
при этом алгоритм построения имеет
следующий вид, рис.2.6:
,
при этом алгоритм построения имеет
следующий вид, рис.2.6:
![]()
![]() (2.8)
(2.8)
![]() .
.

Рис. 2.6
Если
правая часть уравнения (2.5)
![]() будет состоять, например, из постоянной
и периодической составляющих, то это
отразится на рис. 2.5а как поднятие
показанной периодической составляющей
(или ее опускание) на величину постоянной
составляющей, а алгоритм построения
остается прежним. Ясно, что в этом случае
решения
,
будет состоять, например, из постоянной
и периодической составляющих, то это
отразится на рис. 2.5а как поднятие
показанной периодической составляющей
(или ее опускание) на величину постоянной
составляющей, а алгоритм построения
остается прежним. Ясно, что в этом случае
решения
,
![]() и
и
![]() будут отличными от полученных на рис.
2.5 и рис. 2.6.
будут отличными от полученных на рис.
2.5 и рис. 2.6.