

4.4 Решение систем линейных уравнений методом Гаусса
Одним из наиболее универсальных и эффективных методов решений линейных алгебраических систем является метод Гаусса, состоящий в последовательном исключении неизвестных.
Пустьданасистемауравнений
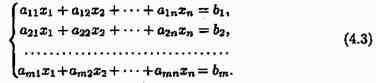
Процесс решения по методу Гаусса состоит из двух этапов. На первом этапе (прямой ход) система приводится к ступенчатому (в частности, треугольному) виду.
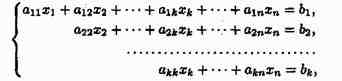
Приведенная ниже система имеет ступенчатый вид
Где
![]()
Коэффициенты aii называются главными элементами системы.
На втором этапе (обратный ход) идет последовательное определение неизвестных из этой ступенчатой системы.
Опишем метод Гаусса подробнее.
Прямой ход.
Будем
считать, что элемент
![]() (если a11=0
, то первым в системе запишем уравнение,
в котором коэффициент при х1 отличен от
нуля).
(если a11=0
, то первым в системе запишем уравнение,
в котором коэффициент при х1 отличен от
нуля).
Преобразуем
систему (4.3), исключив неизвестное х1 во
всех уравнениях, кроме первого (используя
элементарные преобразования системы).
Для этого умножим обе части первого
уравнения на![]() и сложим почленносо вторым уравнением
системы. Затем умножим обе части первого
уравнения на
и сложим почленносо вторым уравнением
системы. Затем умножим обе части первого
уравнения на![]() и
сложим с третьим уравнением системы.
Продолжаяэтотпроцесс,
получимэквивалентнуюсистему
и
сложим с третьим уравнением системы.
Продолжаяэтотпроцесс,
получимэквивалентнуюсистему
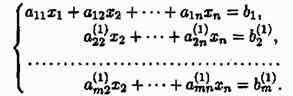
Здесь
![]() — новые значения коэффициентов и правых
частей, которые получаются после первого
шага.
— новые значения коэффициентов и правых
частей, которые получаются после первого
шага.
Аналогичным
образом, считая главным элементом
![]() ,
исключим неизвестное х2 из всех уравнений
системы, кроме первого я второго, и так
далее. Продолжаем этот процесс, пока
это возможно.
,
исключим неизвестное х2 из всех уравнений
системы, кроме первого я второго, и так
далее. Продолжаем этот процесс, пока
это возможно.
Если
в процессе приведения системы (4.3) к
ступенчатому виду появятся нулевые
уравнения, т. е. равенства вида 0=0, их
отбрасывают Если же появится уравнение
вида
![]() то это свидетельствует о несовместности
системы.
то это свидетельствует о несовместности
системы.
Второй этап (обратный ход) заключается в решении ступенчатой системы. Ступенчатая система уравнений, вообще говоря, имеет бесчисленное множество решений, В последнем уравнении этой системы выражаем первое неизвестное xk через остальные неизвестные (xk+1,…,xn). Затем подставляем значение xk в предпоследнее уравнение системы и выражаем xk-1 через (xk+1,…,xn). , затем находим xk-2,…,x1.. Придавая свободным неизвестным (xk+1,…,xn). произвольные значения, получим бесчисленное множество решений системы.
Замечания:
1. Если ступенчатая система оказывается треугольной, т. е. k=n, то исходная система имеет единственное решение. Из последнего уравнения находим xn из предпоследнего уравнения xn-1, далее поднимаясь по системе вверх, найдем все остальные неизвестные (xn-1,...,x1).
2. На практике удобнее работать не с системой (4.3), а с расширенной ее матрицей, выполняя все элементарные преобразования над ее строками. Удобно, чтобы коэффициент a11 был равен 1 (уравнения переставить местами, либо разделить обе части уравнения на a11¹1).
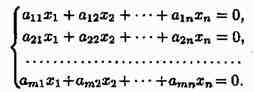
4.5 Системы линейных однородных уравнений
Пусть дана система линейных однородных уравнений
Очевидно,
что однородная система всегда совместна
![]() она имеет нулевое (тривиальное) решение
x1=x2=x3=...=xn=0.
она имеет нулевое (тривиальное) решение
x1=x2=x3=...=xn=0.
При каких условиях однородная система имеет и ненулевые решения?
Теорема 4.4. Для того, чтобы система однородных уравнений имела ненулевые решения, необходимо и достаточно, чтобы ранг r ее основной матрицы был меньше числа n неизвестных, т. е. r<n.
Необходимость.
Так
как ранг не может превосходить размера
матрицы, то, очевидно, r<=n.
Пусть r=n.
Тогда один из минеров размера nхn
отличен от нуля. Поэтому соответствующая
система линейных уравнений имеет
единственное решение:
![]()
Значит, других, кроме тривиальных, решений нет. Итак, если есть нетривиальное решение, то r<n.
Достаточность:
Пусть r<n. Тогда однородная система, будучи совместной, является неопределенной. Значит, она имеет бесчисленное множество решений, т. е. имеет и ненулевые решения. Пустьданаоднороднаясистема nлинейныхуравнений с n неизвестными
Теорема 4.5. Для того, чтобы однородная система n линейных уравнений с n неизвестными имела ненулевые решения, необходимо и достаточно, чтобы ее определитель D был равен нулю, т. е. D=0.
Если система имеет ненулевые решения, то D=0. Ибо при D¹0 система имеет только единственное, нулевое решение. Если же D=0, то ранг r основной матрицы системы меньше числа неизвестных, т.е. r<n. И, значит, система имеет бесконечное множество (ненулевых) решений.
5.Величины, которые полностью определяются своим численным значением, называются скалярными. Примерамискалярных величинявляются: площадь, длина, объем, температура, работа, масса.
Другие величины, например сила, скорость, ускорение, определяются не только своим числовым значением, но и направлением. Такие величины называют векторными. Векторная величина геометрически изображается с помощью вектора.
Вектор- это направленный прямолинейный отрезок, т. е. отрезок, имеющий определенную длину и определенное направление. Если А — начало вектора, а В - его конец, то вектор обозначается символом АВ или а.ВекторВА (у него начало в точке В, а конец в точке A ) называется противоположным вектору АВ .Вектор, противоположный вектору а , обозначается -а .
Длиной или модулемвектораАВ называется длина отрезка и обозначается |АВ|. Вектор, длина которого равна нулю, называется нулевым вектороми обозначается 0 . Нулевой векторнаправления не имеет.
Вектор, длина которого равна единице, называетсяединичным вектороми обозначается через e . Единичный вектор, направление которого совпадает с направлением вектора a , называется ортом вектораa и обо значаетсяa °.
Векторы а и b называются коллинеарными, если они лежат на одной прямой или на параллельных прямых; записывают a ||b .
Коллинеарные векторымогут быть направлены одинаково или противоположно.
Нулевой векторсчитается коллинеарным любому вектору.
Два вектор а и b называются равными (а = b ), если они коллинеарны, одинаково направлены и имеют одинаковые длины.

Из определения равенства векторов следует, что векторможно переносить параллельно самому себе, а начало векторапомещать в любую точку О пространства.
На рисунке 1 векторы образуют прямоугольник. Справедливо равенство b =d , но а с. Векторы а и с — противоположные, а =-с.
Равные векторы называют также свободными.
Три векторав пространстве называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях. Если среди трех векторов хотя бы один нулевой или два любые коллинеарны, то такие векторы компланарны