

10. Оценка качества работы системы с использованием квадратичной интегральной оценки
Квадратичная
интегральная оценка качества используется
в случае колебательных переходных
процессов. Вычисление интеграла следует
вести с применением рекуррентных формул.
При этом передаточная функция замкнутой
скорректированной системы по ошибке
от управляющего воздействия представляется
в виде дробно-рациональной функции.

Так как интеграл конечный, то колебания в системе затухающие.
11. Математическая модель скорректированной системы
При составлении математической модели скорректированной системы необходимо написать передаточную функцию разомкнутой желаемой САУ Wж(p).

Рис. 14. Математическая модель САУ.
Запишем уравнения переменных состояний:
X0=1
X5=X0-X6
X1=17*X5
X2’=10*X1
X3’=-100*X3+100*X2
X4’=-100*X4+100*X3
X5’=-100*X5+100*X4
Для построения переходного процесса воспользуемся пакетом SyAn.
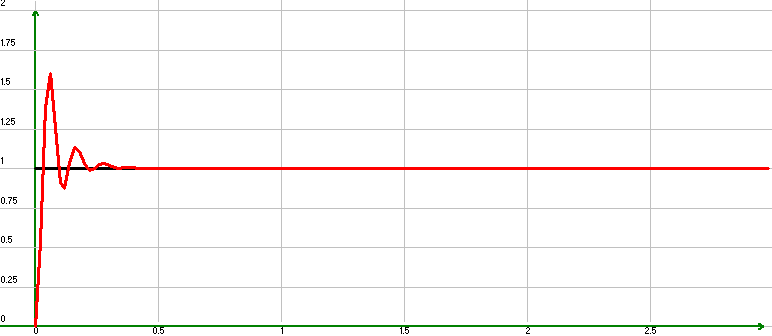
Рис.15. Переходный процесс при подаче g(t)=1(t).
Время регулирования составляет 0,19 секунд, а перерегулирование 16%.

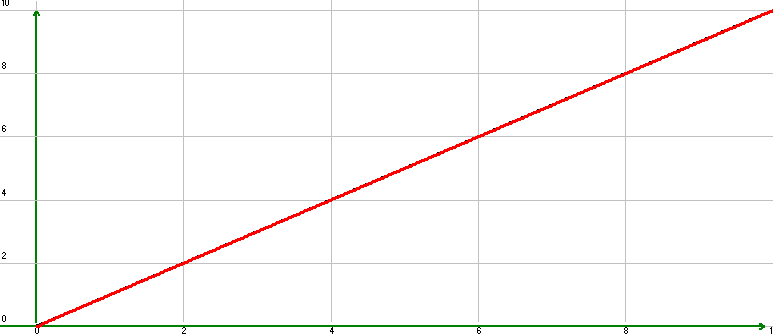
Рис.16. Переходный процесс при подаче g(t)=1(t)*t.
12. Определение ошибки от возмущающего воздействия
Ошибка от возмущающего воздействия определяется по формуле:
![]()
![]() ;
;
![]() .
.
В результате вычисления получаем, что ошибка от возмущающего воздействия при p стремящемся к нулю очень мала.
Заключение
В курсовой работе в соответствии с выбранной функциональной схемой рассмотрели анализ и синтез САУ и составили передаточные функции системы. Построили частотные характеристики. По методу Найквиста проверили устойчивость работы системы и определили, что при начальных параметрах системы она является неустойчивой. Используя логарифмические частотные характеристики определили параметры корректирующего устройства по методу Солодовникова. При помощи корректирующего устройства добились того, чтобы система стала устойчивой и обеспечили требуемые показатели качества системы при подаче на вход САУ управляющих воздействий. В ходе работы был построен график переходного процесса при единичном управляющем воздействии по методу трапеций. Время регулирования в скорректированной системе около 0,3 секунд, перерегулирование 16%, скоростная ошибка равна 0.01, а также ошибка от единичного возмущающего воздействия равна 0,005.