

7. Построение границы устойчивости по методу d – разбиения
D – разбиение производится относительно параметра Тм. Для этого решим характеристическое уравнение замкнутой системы относительно интересующих нас параметров.
Передаточная функция разомкнутой САУ:
![]() ;
;
 ;
;
Характеристическое уравнение замкнутой системы:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Приравняем к нулю.
![]() ;
;
![]()
![]()
![]()
![]()
![]()
Построим кривую D-разбиения.
I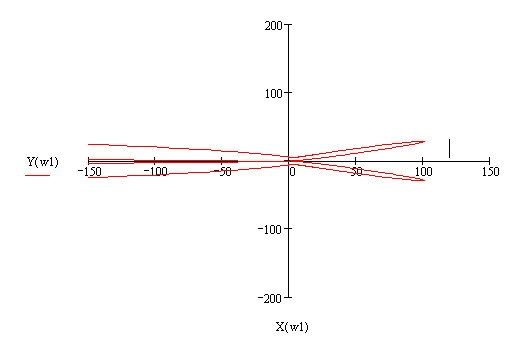
Рис. 7. Кривая D-разбиения
Проверим область I на устойчивость по Найквисту, взяв точку X= 50 и Y = 0.
![]()
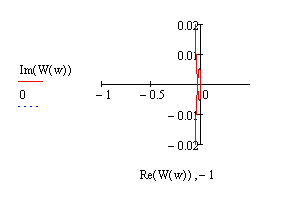
Область I – область не устойчивости.
8. Определение параметров корректирующего устройства.
8.1. Построение желаемой логарифмической амплитудно-частотной характеристики.
Показатели качества регулирования:
ск = 0,015 t рег = 0,15 с пер = 20 %
Частота среза определяется с помощью номограммы В.В.Солодовникова. По перерегулированию определяем Pmax=1.3, тогда можем найти частоту среза и по ней определить требуемые показатели качества системы регулирования.

Для систем с частотами среза ср=1100 Hz достаточные запасы по модулю и фазе принимают следующие значения:
![]()
Требуемый коэффициент усиления системы найдём из формулы:

Объединив все параметры желаемой САУ, находим передаточную функцию и построим желаемую ЛАХ:
![]() .
.
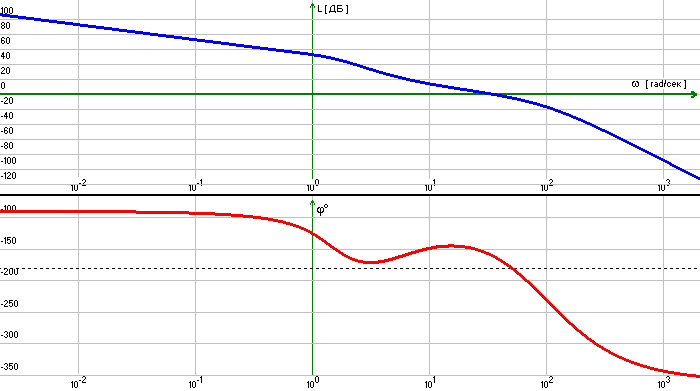
Рис. 8. ЛАХ желаемой САУ.
8.2. Определение параметров корректирующего устройства.
Построим амплитудно-частотную характеристику корректирующего устройства по правилу:
![]()
График представлен на рис. 9. Запишем передаточную функцию корректирующего устройства:
![]() .
.
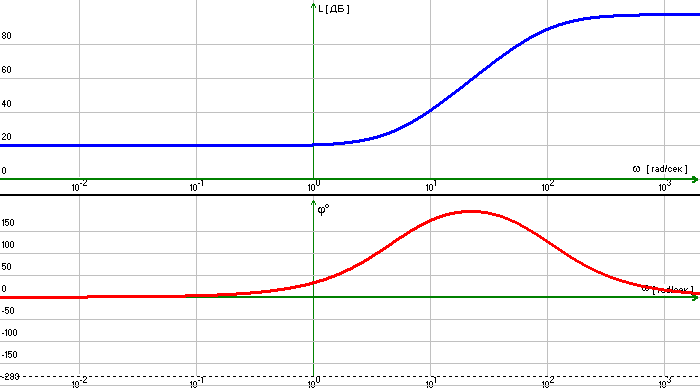
Рис. 9. ЛАХ корректирующего устройства.
При схемной реализации корректирующей цепи передаточную функцию корректирующего устройства целесообразно представить в виде совокупности ряда табличных цепей, т.е. корректирующую цепь разобьем на 3 простых звена. Задаваясь одним параметром схемы через соответствующие формулы определяем параметры всей схемы.

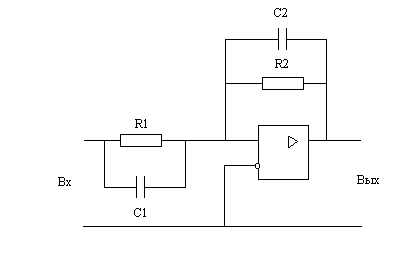
Рис. 10. Модель корректирующего устройства.
1.
![]() .
.
T1=0,2; R1=1,6 кОм; R2=16 кОм; C1=12,5 мкФ; T2=0,02; C2=1,25 мкФ.
2,3.
![]() .
.
T1=0,2; R1=1,6 кОм; R2=1,6 кОм; C1=125 мкФ; T2=0,02; C2=12,5 мкФ.
9. Построение переходного процесса
Для построения переходного процесса возьмём передаточную функцию скорректированной системы:
.
Передаточная функция замкнутой системы:
 ;
;
![]() .
.
Построим график вещественной функции (рис.11):
Рис. 11. График вещественной функции
По методу трапеций построим переходной процесс. Разобьем вещественную функцию на три трапеции и для каждой трапеции запишем h-функцию.
Таблица 9.1.
Трапеция 1 |
Трапеция 2 |
Трапеция 3 |
|||||||||
di=45 0i=65 10.65 |
di=65 0i=85 10.68 |
di=85 0i=125 10.68 |
|||||||||
h0i=-1.6 |
h0i=2.73 |
h0i= -0,13 |
|||||||||
tтабл, с |
tист, с |
hi |
hdihi |
tтабл, с |
tист, с |
hi |
hdihi |
tтабл, с |
tист, с |
hi |
hdihi |
0,4 |
0,133 |
0,215 |
-0,344 |
0,4 |
0,018 |
0,215 |
0,587 |
0,4 |
0,013 |
0,215 |
-0,028 |
1,2 |
0,267 |
0,6119 |
-0,979 |
1,2 |
0,055 |
0,6119 |
1,670 |
1,2 |
0,038 |
0,6119 |
-0,080 |
2,4 |
0,400 |
1,0276 |
-1,644 |
2,4 |
0,109 |
1,0276 |
2,805 |
2,4 |
0,075 |
1,0276 |
-0,134 |
3,6 |
0,533 |
1,1678 |
-1,868 |
3,6 |
0,164 |
1,1678 |
3,188 |
3,6 |
0,113 |
1,1678 |
-0,152 |
4 |
0,667 |
1,1627 |
-1,860 |
4 |
0,182 |
1,1627 |
3,174 |
4 |
0,125 |
1,1627 |
-0,151 |
6,8 |
0,800 |
0,9335 |
-1,494 |
6,8 |
0,309 |
0,9335 |
2,548 |
6,8 |
0,213 |
0,9335 |
-0,121 |
11,2 |
0,933 |
1,0387 |
-1,662 |
11,2 |
0,509 |
1,0387 |
2,836 |
11,2 |
0,350 |
1,0387 |
-0,135 |
14,8 |
1,067 |
0,9862 |
-1,578 |
14,8 |
0,673 |
0,9862 |
2,692 |
14,8 |
0,463 |
0,9862 |
-0,128 |
21,2 |
1,200 |
1,0019 |
-1,603 |
21,2 |
0,964 |
1,0019 |
2,735 |
21,2 |
0,663 |
1,0019 |
-0,130 |
Просуммировав все три графика, получим переходный процесс.
Таблица 9.2.
t |
0 |
0,4 |
1,2 |
2,4 |
3,6 |
4 |
6,8 |
11,2 |
14,8 |
21,2 |
h |
0 |
0,215 |
0,612 |
1,028 |
1,168 |
1,163 |
0,934 |
1,039 |
0,986 |
1,002 |
Рис. 12. Переходный процесс
По графику переходного процесса определяем, что время регулирования составляет около 12 секунд, а перерегулирование около 20%.Скоростная ошибка равна:
