

Лекція №5 Екстремальні задачі. Методи мінімізації функцій однієї змінної. |
23 |
Лекція №6 Числові методи мінімізація функцій багатьох змінних. |
28 |
Лекція №7 Методи інтерполяції таблично заданих функцій. |
32 |
Лекція №8 Методи апроксимації і наближення функцій. |
36 |
Лекція №9 Чисельне диференціювання. |
40 |
Лекція №10 Чисельне інтегрування. |
43 |
Лекція №5 Екстремальні задачі. Методи мінімізації функцій однієї змінної
Цілі і задачі оптимізації. Методи знаходження мінімуму функцій однієї змінної. Методи дихотомії, золотого перетину, Фібоначі, квадратичної і кубічної інтерполяції.
Основні поняття
Оптимізація – це пошук найкращого (найбільш ефективного) рішення.
Критерій оптимізації – це показник, який дозволяє визначити якість отриманого розв’язку задачі.
Керовані змінні – це такі параметри задачі, значення яких можна змінювати, підвищуючи при цьому якість розв’язку задачі.
Цільова функція – це функція, що пов’язує керовані змінні та критерії оптимізації таким чином, що дозволяє обчислити значення критерію при довільних значеннях керованих змінних.
Ограничения – математические соотношения, отражающие условия, накладываемые на аргументы или значения целевой функции.
Наприклад,
для задач апроксимації найбільш часто
використовуваними цільовими функціями
є функції засновані на квадратичному,
мінімаксному або абсолютному критеріях:
![]() ,
,
![]() ,
,
![]() ,
де
,
де
![]() - відхилення значень функції обчислених
в точках xi
від емпіричних.
- відхилення значень функції обчислених
в точках xi
від емпіричних.
Оптимізація при обмеженнях (лінійна)
Цільова функція
Q(X) =P1 X1 +Р2Х2 + . . . +РnХn → Признак оптимальности
Основные ограничения
a11x1 +a12Х2 +...+a1nXn < / > / = b1,
...
am1x1 +am2Х2 +...+amnXn < / > / = bm,
Дополнительные ограничения:
Условие целочисленности
Условие, что Х может принимать значения 0 и 1
Приклад: Задача о диете
цель - стоит задача минимизации стоимости набора продуктов
![]()
где c- стоимость единицы продукта; х - искомое количество продукта; n - количество продуктов в списке
Назначение - составить оптимальный набор продуктов
Условия решения - Имеется набор продуктов Х, необходимых для жизни человека. Каждый і-продукт при цене сі имеет калорийность qі и его количество в рационе не должно быть ниже хімин. и не больше хімакс –
Внеш. ограничения отсутсвуют
Внутр ограничения
-ximin<=хi<=хімax.
Cуммарная
калорийность не ниже заданной
![]()

Пример задача о диете из двух составляющих - жиров (сало) Х и углеводов (сахар)У. Человек должен потреблять:
- не менее 8 ед. жиров и 5 ед. углеводов.
- не более 18 ед. жиров и 31 ед. углеводов:
8<=X<=18
5<=Y<=31 (1)_
Калорийность жиров 11, углеводов 12
Суммарная калорийность не менее 220
Q =11X + 12Y >=220 (2)_
Цена жиров 2.5, углеводов 6
Z=2.5 X + 6Y (3)_
Найти Х и У
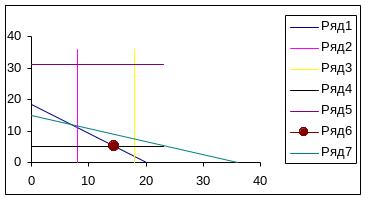
Вначале проводятся границы диапазонов изменения Х и У
Чтобы получить точки, удовлетворяющие условию (2), проведем прямую (например, положив сначала Х=0 - У=18,3, а затем У=0 - Х=20. Для того чтобы найти полуплоскость, удовлетворяющую неравенству 2, возьмем, например, произвольную точку, не лежащую на прямой, и проверим, удовлетворяет она условию или нет. Если удовлетворяет, то вся полуплоскость, в которой находится эта точка, является допустимой (по отношению к этому условию). В противном случае полуплоскость является недопустимой и заштриховывается. Таким же образом поступим с условием 1 и снова исключим точки, не входящие в допустимую область. Графическое изображение этих неравенств воспроизведено на рис. 6.1. Все точки плоскости, не исключенные условиями, образуют допустимую область. Вследствие условий, налагаемых на знаки, она всегда лежит в первом квадранте плоскости.
Все точки, в которых целевая функция принимает значение 120, лежат на прямой 2,5 Х +6 У =120 — линии уровня Q == 120, принадлежащей числу 120. Все линии уровня, принадлежащие каким-либо другим значениям, также являются прямыми, причем параллельными прямой Q == 120. Если сместить прямую Q == 120 параллельно самой себе в одном направлении, то значения, принадлежащие линиям уровня, уменьшаются; при параллельном переносе в другом направлении они увеличиваются. В каждой точке допустимой области целевая функция принимает значение, принадлежащее линии уровня, на которой лежит эта точка.
Направление, в котором следует осуществлять сдвиг, чтобы достичь меньших значений целевой функции, можно найти построением другой линии уровня, например Q=100. Путем параллельного переноса прямой в направлении меньшиx значений целевой функции в допустимой области достигают того, что параллельная прямая будет пересекать допустимую область только в одной точке. (В общем случае параллельная прямая может проходить по отрезку, лучу или прямой.) В примере точка Р, лежащая на линии уровня, принадлежащей числу 66 (см. рис. 6.2). Все другие допустимые точки лежат на линиях уровня, принадлежащих большим значениям. Все точки, лежащие на линиях уровня с меньшими значениями, являются недопустимыми. Таким образом, точка Р есть искомая оптимальная точка.
Заметим, что оптимальная точка является угловой точкой допустимой области. Точка Р не есть относительный минимум целевой функции, так как она вообще не имеет относительных экстремумов, т. е. Р не может быть найдена методом дифференциального исчисления.
Все задачи линейного программирования с двумя переменными можно решить с помощью графического метода, объясненного на этом примере.
Множество всех оптимальных решений задачи линейного программирования выпукло.
Если задача имеет решение, то всегда имеется по меньшей мере одна вершина, где достигается оптимальное значение целевой функции.
Всякая допустимая область имеет конечное число вершин. Допустимая область в ЗЛП (если она не пуста) всегда имеет по меньшей мере одну вершину.
Для решения задач ЛП применяется различные модификации симплекс-метода.
В настоящее время разработано значительное количество программных продуктов, реализующих алгоритмы ЛП. - начиная от экселя и заканчивая специализироваными прикладными пакетами программ.