

3.1. Электродвигатель постоянного тока
Двигатель постоянного тока, как элемент САУ, описывается дифференциальными уравнениями якорной цепи и механической части двигателя:
|
(4) |
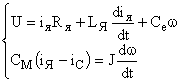 ,
,
где
![]() –
соответственно индуктивность и активное
сопротивление якорной цепи;
–
соответственно индуктивность и активное
сопротивление якорной цепи;
![]() —
соответственно
ток якорной цепи и ток нагрузки;
—
соответственно
ток якорной цепи и ток нагрузки;
![]() –
конструктивные
постоянные двигателя;
–
конструктивные
постоянные двигателя;
![]() –
момент
инерции двигателя.
–
момент
инерции двигателя.
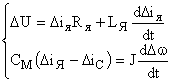
При
изменении напряжения на входе двигателя
на некоторую величину
изменяются
ток двигателя
и
частота вращения двигателя
и,
пренебрегая обратной связью по противоЭДС
двигателя
![]() ,
получаем уравнения якорной цепи и
механической части двигателя в
приращениях:
,
получаем уравнения якорной цепи и
механической части двигателя в
приращениях:
|
(5) |
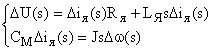
Преобразовывая
уравнения (5) и, считая
![]() ,
переходим к операторной форме записи
данных уравнений:
,
переходим к операторной форме записи
данных уравнений:
|
(6) |
Из уравнений (6) получаем выражения для передаточных функций якорной цепи и механической части двигателя:
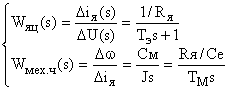
где
![]() –
электромагнитная постоянная двигателя,
–
электромагнитная постоянная двигателя,
![]() —
электромеханическая
постоянная двигателя.
—
электромеханическая
постоянная двигателя.
Согласно этой системе получаем, что развернутая структурная схема двигателя принимает вид, показанный на рис.1.
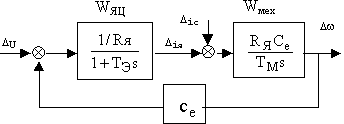
Рис. 1. Развернутая структурная схема двигателя
Свертывая развернутую схему, двигатель можно представить одним колебательным звеном (рис. 2):
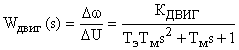 ,
,
где
![]() .
.
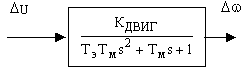
Рис. 2. Свернутая структурная схема двигателя
3.2. Асинхронный электродвигатель
Асинхронный электродвигатель является наиболее широко используемой электрической машиной. Это объясняется простотой его конструкции и достаточно жесткими механическими характеристиками. Механическая характеристика имеет вид, представленный на рис. 3.

Рис. 3. Сравнительные механические характеристики электродвигателей.
Конструктивно асинхронный двигатель состоит из ротора, на котором расположена короткозамкнутая обмотка типа "беличья клетка", и статора. На статоре расположены обмотки управления, число которых определяется числом фаз питающего напряжения. Синхронная частота вращения вала двигателя определяется как
![]() ,
,
где
![]() –
частота питающего напряжения
–
частота питающего напряжения
![]() –
число
пар полюсов статорной обмотки.
–
число
пар полюсов статорной обмотки.
Для управления асинхронными двигателями используются частотные и амплитудные методы. В первом случае регулирование частоты вращения осуществляется путем изменения частоты питающего напряжения. Во втором случае для изменения частоты вращения вала асинхронного двигателя изменяется напряжение, подаваемое на статорные обмотки двигателя.
Точное математическое описание процессов, происходящих в асинхронном двигателе, представляется системой уравнений Парка-Горева. Оно используется при детальном рассмотрении систем автоматического управления с такими двигателями. Но так как, электромагнитные процессы, протекающие в асинхронных двигателях достаточно быстротечны, при их рассмотрении в большинстве приложений рассматривают только электромеханическую их составляющую. Поэтому передаточная функция асинхронного двигателя в большинстве приложений представляется как
![]() ,
,
где
![]() –
коэффициент пропорциональности между
угловой скоростью вала и управляющим
сигналом,
–
коэффициент пропорциональности между
угловой скоростью вала и управляющим
сигналом,
![]() –
электромеханическая
постоянная времени двигателя и
исполнительного механизма.
–
электромеханическая
постоянная времени двигателя и
исполнительного механизма.