

Основные элементы системы автоматического управления
Основные элементы САУ
Системой автоматического управления (САУ) называется динамическая система, обладающая свойствами сохранять требуемую функциональную связь между некоторыми, описывающими ее поведение величинами путем сравнения функций этих величин и использования полученных разностей для управления источниками энергии.
В качестве величин, характеризующих состояние САУ, могут служить заданное (управляющее) и действительное значение регулируемой величины.
Регулируемой величиной называется физическая величина, которой необходимо управлять.
Управляющей называется физическая величина, в соответствии с которой необходимо управлять регулируемой величиной.
Исходя из определения САУ, она может быть в общем виде представлена, как это показано на рисунке 1.1
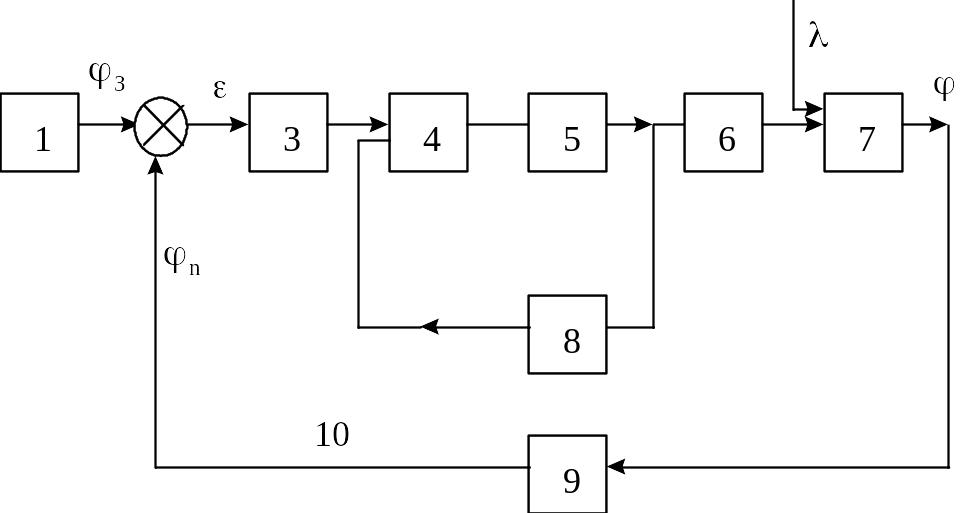
Рисунок 1.1 - Элементная схема САУ
1 - управляющий или задающий элемент;
2 - элемент сравнения заданного
![]() и измеренного
и измеренного
![]() значения регулируемой величины,
выделяющий сигнал ошибки (рассогласования)
значения регулируемой величины,
выделяющий сигнал ошибки (рассогласования)
![]() ;
3 - корректирующий элемент (регулятор),
служащий для придания системе требуемых
динамических свойств; 4 - усилительный
элемент, усиливающий управляющий сигнал,
полученный в регуляторе; 5 - исполнительный
элемент (механизм); 6 - регулирующий
орган; 7 - объект регулирования; 8 - местная
обратная связь; 9 - измерительный
элемент; 10 - главная обратная связь;
;
3 - корректирующий элемент (регулятор),
служащий для придания системе требуемых
динамических свойств; 4 - усилительный
элемент, усиливающий управляющий сигнал,
полученный в регуляторе; 5 - исполнительный
элемент (механизм); 6 - регулирующий
орган; 7 - объект регулирования; 8 - местная
обратная связь; 9 - измерительный
элемент; 10 - главная обратная связь;
![]() -возмущающее воздействие;
-возмущающее воздействие;
![]() -регулируемая величина.
-регулируемая величина.
Всякое воздействие, которое стремится нарушить требуемую функциональную связь между управляющей и регулируемой величиной называется возмущающим.
Разность между заданным
и измеренным
значением регулируемой величины в
установившемся режиме называется
статической ошибкой (отклонением)
регулирования
![]() .
.
В каждом конкретном случае САУ может иметь дополнительные элементы или не иметь некоторых из указанных выше, например, элемента внутренней или главной обратной связи, усилителя.
Характеристики основных элементов САУ.
1. Усилители мощности
1.1. Тиристорный преобразователь.
Тиристорный преобразователь, как
элемент САУ, представляет собой импульсную
систему (СИФУ и выпрямитель ВП),
преобразующую входной управляющий
сигнал (напряжение
![]() )
в функцию моментов отпирания тиристоров,
изменяющую напряжение на входе двигателя
)
в функцию моментов отпирания тиристоров,
изменяющую напряжение на входе двигателя
![]() ,
и описываемую дифференциальным
уравнением:
,
и описываемую дифференциальным
уравнением:
|
(1) |
где
![]() –
постоянная времени тиристорного
преобразователя (
–
постоянная времени тиристорного
преобразователя (![]() сек
для мостовой полностью управляемой
схемы);
сек
для мостовой полностью управляемой
схемы);
![]() –
передаточный
коэффициент тиристорного преобразователя
–
передаточный
коэффициент тиристорного преобразователя
![]() .
.
При
изменении напряжения управления на
некоторую величину
![]() изменяется
напряжение на входе двигателя
изменяется
напряжение на входе двигателя
![]() .
Тогда уравнение (1) примет вид:
.
Тогда уравнение (1) примет вид:
![]()
Переходя к операторной форме записи, получаем:
![]()
Отсюда выражение для передаточной функции тиристорного преобразователя принимает вид:
![]()
1.2. Широтно-импульсный преобразователь.
Широтно-импульсный преобразователь
(ШИП) представляет набор электронных
ключей, обеспечивающих импульсное
изменение напряжения на нагрузке,
подключенной к выходу этого преобразователя.
В современной технике частоты коммутации
ШИП лежат в пределах (2—50) кГц. Поэтому
запаздывание в такой системе принимается
равным нулю. Во многих приложениях ШИП
представляется как безинерционный
элемент с передаточной функцией
![]() вида:
вида:
![]() ,
,
где
![]() ,
,
![]() –
величины приращений изображений
выходного и входного сигнала ШИП
соответственно.
–
величины приращений изображений
выходного и входного сигнала ШИП
соответственно.
Более точное представление процессов в САУ, содержащей ШИП, может быть получено с использованием дискретного преобразования Лапласа.