

Національний технічний університет України
«Київський політехнічний інститут»
Кафедра приладобудування
Лабораторна робота №2 дослідження характеристик диференціального трансформаторного перетворювача
Виконала:
Студенка гр.ПМ-02
Цимбал Н.В.
Перевірив:
Нечай С.О.
Київ 2012р.
Лабораторна робота № 2 дослідження характеристик диференціального трансформаторного перетворювача
Мета роботи – ознайомитися з принципом дії й конструкціями трансформаторних перетворювачів; експериментально визначити характеристики диференційно-трансформаторного перетворювача типу ПДЗ (Івано-франківський приладобудівний завод).
Теоретичні відомості
У приладобудуванні широке застосування знаходять електромагнітні перетворювачі. На рис. 11 зображений магнітний ланцюг електромагнітного перетворювача з двома обмотками W1 і W2. Повний опір обмотки W1, нехтуючи витоками магнітного потоку (поля розсіювання) можна записати у виді:
де R0 – опір обмотки постійному струму; zмFe – магнітний опір феромагнітної частини магнітного ланцюга, що при роботі перетворювача на перемінному струмі варто вважати комплексним: zмFe=Rм+jxм, де хм відбиває втрати в сталі на гістерезіс і вихрові струми; Rб=/(0S) – опір повітряного зазору; і S довжина і площа зазору; 0=410-7 (г/м) – магнітна проникність повітря.
Якщо втрати в сталі малі (xм<<Rм), то індуктивність L=W12/(Rм+Rб) і аналогічно взаємоіндуктивність між обмотками М=W1W2/(Rм+Rб), якщо змінити Rб, наприклад, наближаючи рухомий сердечник 1 до нерухомого 3 (зменшується ), чи зменшити S, повертаючи сердечник щодо нерухомої частини магнітного ланцюга, то при цьому буде змінюватися значення індуктивності L і взаємоіндуктивність М (рис. 11,а).
Значення L і M можна змінювати і при нерухомих сердечниках 1 і 3 шляхом введення в повітряний зазор пластини із феромагнітного матеріалу (зменшується ) чи пластини з електропровідного неферромагнітного матеріалу (рис. 11, в). В останньому випадку зміна L і М обумовлена дією розмагнічуючих струмів, індукований у пластині основним магнітним потоком, що проходить по магнітному ланцюзі.

Рис. 11. Магнітний ланцюг електромагнітного перетворювача з двома обмотками
Перетворювачі, що перетворюють вхідну величину у вигляді переміщення в зміну індуктивності, називають індуктивними.
Перетворювачі, що перетворюють переміщення в зміну взаємно індуктивності, прийнято називати трансформаторними, чи взаємно індуктивні.
У трансформаторних перетворювачах зміна взаємно індуктивності М можна одержати не тільки при зміні магнітного опору, але і при переміщенні однієї з обмоток, як це показано на рис. 11, б.
На рис. 11, зображений перетворювач, аналогічний по конструкції трансформаторному перетворювачу на рис. 11,б, але з постійним магнітом, що може бути замінений постійним електромагнітом, якщо через обмотку W1 пропустити постійний струм. При нерухомій обмотці W2 ЕРС на її затискачах дорівнює нулю. Однак, якщо обмотка W2 під впливом вимірюваної величини почне переміщуватися, то зчеплений з нею магнітний потік змінюється, що відповідно до закону електромагнітної індукції викликає появу в обмотці ЕРС, рівної е=-dФ/dtW2, де dФ/dt швидкість зміни магнітного потоку, обумовлена швидкістю переміщення обмотки в повітряному зазорі. Перетворювач має вхідну величину у вигляді швидкості лінійних чи кутових переміщень, а вихідну - у вигляді індуктивної ЕРС. Подібні перетворювачі, у яких швидкість зміни вимірюваної величини перетвориться в індуктивну ЕРС, називаються індукційними. Необхідно відзначити, що поділ електромагнітних перетворювачів на індуктивні й індукційні в більшій мірі умовно, так як принцип дії в тих і інші оснований на явищах електромагнетизму. Це служить причиною деякої плутанини і суперечливих класифікацій у літературних джерелах.
Індуктивними й індукційними перетворювачами можуть бути безпосередньо виміряні різні механічні величини: лінійні і кутові переміщення, рівень швидкості чи прискорення деталей, що рухається, деформація деталей, їхні розміри. З використанням додаткових перетворювачів може бути здійснений вимір інших фізичних величин: напір і вакуум, витрата рідини, газів, температура. Далі приводиться далеко не повний перелік приладів і пристроїв, побудованих з використанням індуктивних і індукційних перетворювачів; електричні манометри, дифманометри, динамометри, рівнеміри, ваги; безконтактні кінцеві вимикачі, що спрацьовують при підході якої-небудь частини машини до свого кінцевого положення; безконтактні датчики для визначення моменту проходження якої-небудь деталі і для виміру числа обертів; пристрій для виміру деталей при перевірці розмірів, а також у процесі обробки; пристрої для виміру відносних подовжень, зусиль, переміщень; пристрої для виміру напруг; пристрої для виміру коливань земної поверхні (сейсмографи) і параметрів вібрацій і ударів; пристрої і станки автоматичного балансування роторів машин; прилади і пристрої систем орієнтації і навігації.
До переваг індуктивних перетворювачів відносяться: простота конструкції і надійність у роботі; відносно велика потужність на виході, що дає можливість безпосередньо до перетворювача підключати вимірювальний прилад; можливість живлення від мережі промислової частоти.
Деякі найбільш типові конструктивні схеми, представлені в табл. 1 і 2, типові схеми підключення до вимірювального ланцюга - у табл. 3.
Для схеми 1-1 (табл. 1, схема1-1) можна записати:
 .
.
Коли магнітний опір повітряного зазору значно більше магнітного опору магнітопроводу, тобто Rм<<Rб, то залежність індуктивності L від величини зазору б прийме вигляд
 .
.
Залежність індуктивності L перетворювача від зазору істотно нелінійна ( у знаменнику) і задовільна лінійність має місце за умови що <<.
Чутливість перетворювача
 обернено пропорційна квадрату зазору.
Діапазон виміру схеми 1-1 простирається
від 0,001 до 1 мм. При великому зазорі
залежність L=f()
стає нелінійною. Тому при вимірюванні
великих переміщень (до 5...8 мм)
використовують перетворювачі з
регульованою площею (схема 1-2), які мають
велику лінійність.
обернено пропорційна квадрату зазору.
Діапазон виміру схеми 1-1 простирається
від 0,001 до 1 мм. При великому зазорі
залежність L=f()
стає нелінійною. Тому при вимірюванні
великих переміщень (до 5...8 мм)
використовують перетворювачі з
регульованою площею (схема 1-2), які мають
велику лінійність.
Дуже поширені також перетворювачі соленоїдного типу з розімкнутим магнітним ланцюгом. У таких перетворювачах зміна індуктивності обмотки досягається переміщенням у котушці феромагнітного сердечника. При введенні усередину котушки сердечника індуктивність її змінюється приблизно пропорційно масі введеного усередину обмотки сердечника. Перевагою соленоїдних перетворювачів є можливість виміру великих переміщень (до 50...60 мм). Істотним недоліком описаних перетворювачів є наявність на вході значного
Таблиця 1
Конструктивні схеми індуктивних перетворювачів
№ п/п |
Перетворювач |
Схема |
Рекомендуючі межі робочого ходу, мм |
1 |
З змінним зазором |
|
0,0011 |
2
|
З змінною площею |
|
0,18 |
3 |
На Ш - подібних сердечниках |
|
0,0012 |
4 |
Диференційний |
|
0,0011 |
5 |
Диференційний циліндричного типу |
|
0,16 |
6 |
Диференційний соленоїдного типу |
|
430 |
7 |
З профільованим диском |
|
Любі |
8 |
Диференційний з профільованим диском |
|
Любі |








Таблиця 2
Конструктивні схеми трансформаторних перетворювачів
1 |
Перетворювач с прямолінійним рухом якоря |
|
2 |
Перетворювач с поворотним якорем |
|
3 |
Соленоїдний перетворювач |
|
початкового сигналу. У диференційних схемах перетворювачів (схеми 1-4 -1-6,1-8) обмотки включають зустрічно, що дозволяє одержати на характеристиці точку з нульовим рівнем.
Диференційні схеми мають більш широку лінійну ділянку робочої характеристики, велику чутливість і меншу похибку. Найбільш розповсюджені схеми включення диференційних перетворювачів приведені в табл. 3.
В індуктивних перетворювачах при переміщенні якоря відбувається зміна магнітної енергії L (I2/2), унаслідок чого на якір діють сили, що мають характер сил пружності, так названі електромеханічні сили. У тих випадках, коли якір зв'язаний з чутливим елементом (мембраною, сильфоном), ці сили спотворюють результат виміру, що необхідно враховувати при побудові вимірювальних пристроїв. Електромеханічні сили мають перемінне значення в часі і міняються з частотою, рівній подвійній частоті струму. Збільшення чутливості перетворювачів S=dL/dt приводить до росту електромеханічних сил. Застосування диференційних перетворювачів значною мірою дозволяє усунути цей недолік. Крім того, диференційні перетворювачі менш чутливі до коливань навколишньої температури внаслідок того, що зміна опору обмоток, включених зустрічно, не викликає сигналу.
Індуктивні перетворювачі живляться перемінним струмом синусоїдальної чи (рідше) прямокутної форми частотою 50...20000 Гц, Недоліком схем, яка живиться струмом мережної частоти (50 Гц) є наявність похибок від промислових перешкод, зміна форми напруги мережі. Крім того, перетворювачі з низькочастотним живленням мають невисоку чутливість, великі габарити і малу швидкість дії. Тому в даний час найбільше поширення одержали перетворювачі, розраховані на живлення від електронних генераторів.
Динамічна похибка перетворювачів залежить від відношення несучої частоти до частоти контрольованого розміру. Для того щоб відносна похибка була менша 2%, необхідно виконати умову (fn/fe)>4, (де fn – частота живильної напруги; fe – частота зміни розміру). Частота живлення сучасних індуктивних, приладів знаходиться в межах 3...15 кГц, при цьому необхідні спеціальні матеріали магнітопроводов перетворювачів. Найбільш кращі феррити, мають магнітну проникливість 100...2000 Гн/м, гарну температурну стабільність і малі втрати. Крім них у перетворювачах використовують шихтовану і розрізну електротехнічні сталі, пермалой і деякі інші матеріали.
У лабораторній роботі підлягає дослідженню трансформаторний диференійний перетворювач соленоїдного типу (див. табл. 2, 3).
Таблиця 3
Схеми включення диференційних індуктивних датчиків
|
Схема |
Графік |
Еквівалентна схема |
Розрахункові формули |
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
,
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|



 ,
, ,
, ,
, .
.


 ,
, .
.


 .
.


 ,
, .
.


 .
.


 .
.
Підвищення частоти живлення трансформаторних перетворювачів трохи збільшує чутливість. Це пояснюється тим, що зі зменшенням потоку намагнічування знижується і струм намагнічування, що зменшує спадання напруги на активному й індуктивному опорі розсіювання первинної обмотки. Однак із збільшенням частоти одночасно збільшуються втрати в сталі і, отже, зростає активний струм, що відповідає цим втратам. Це, у свою чергу, приводить до збільшення струму не робочого ходу й збільшенню спадання напруги на активному й індуктивному опорі розсіювання первинної обмотки, що в кінцевому рахунку зменшує чутливість датчика. Таким чином, чутливість перетворювача у функції частоти представляє собою криву з максимумом. З підвищенням частоти живлення, трансформаторного перетворювача, за інших рівних умов, знижується потік намагнічування. Це дозволяє зменшити габарити магнітопроводу, а головне – знизити електромеханічні сили.
Диференційно-трансформаторний перетворювач ПД-3 (рис. 12) складається з двох котушок 4 і 8, на яких намотані обмотки збудження, які складаються із секцій W1 і W’1, і вхідна обмотка, що складається із секцій W2, W’2.
Секції W1 і W1’ включаються послідовно і живляться перемінним струмом промислової частоти. Створюваний обмоткою збудження магнітний потік індукує ЕРС в обмотках W2 і W’2, значення кожної з яких залежить від струму живлення обмотки збудження і взаємо індуктивності між відповідною обмоткою, і обмоткою збудження.
Взаємо індуктивність обмотки W2-М2 і взаємо індуктивність обмотки W2-M2 рівні між собою при симетричному, відносно котушок 4 і 8, положенні плунжера 6 (так названа магнітна нейтраль перетворювача). При зсуві плунжера вгору від нейтрали взаємо індуктивність М2 збільшується, а М2 зменшується; при зсуві плунжера униз від нейтралі - навпаки.
Зміна взаємо індуктивності М2 і М2 пропорційно величині переміщення плунжера відносно магнітної нейтралі.
Так як обмотки W1 і W1 включені послідовно, а W2 і W2 – зустрічно, взаємо індуктивність між вихідною обмоткою й обмоткою збудження М=М2-М2, М – комплексна величина, залежність якої від переміщення плунжера має вигляд:
 ,
,
де Мн – номінальне значення модуля індуктивності; S – переміщення плунжера, відлічується від магнітної нейтрали; Smax – максимальне переміщення плунжера від магнітної нейтрали; – аргумент взаємо індуктивності.
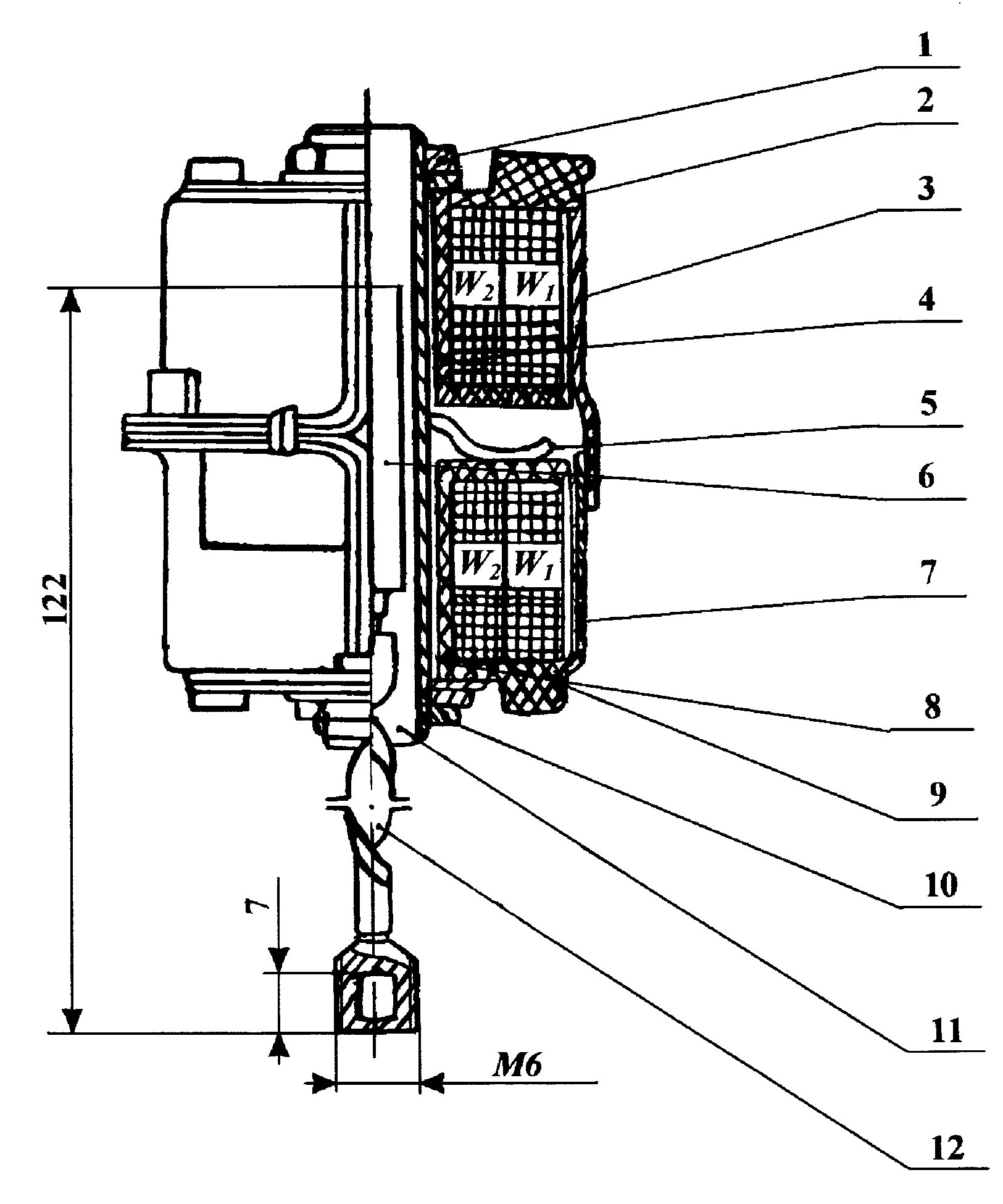
Рис. 12. Диференційно-трансформаторний перетворювач серії ПД
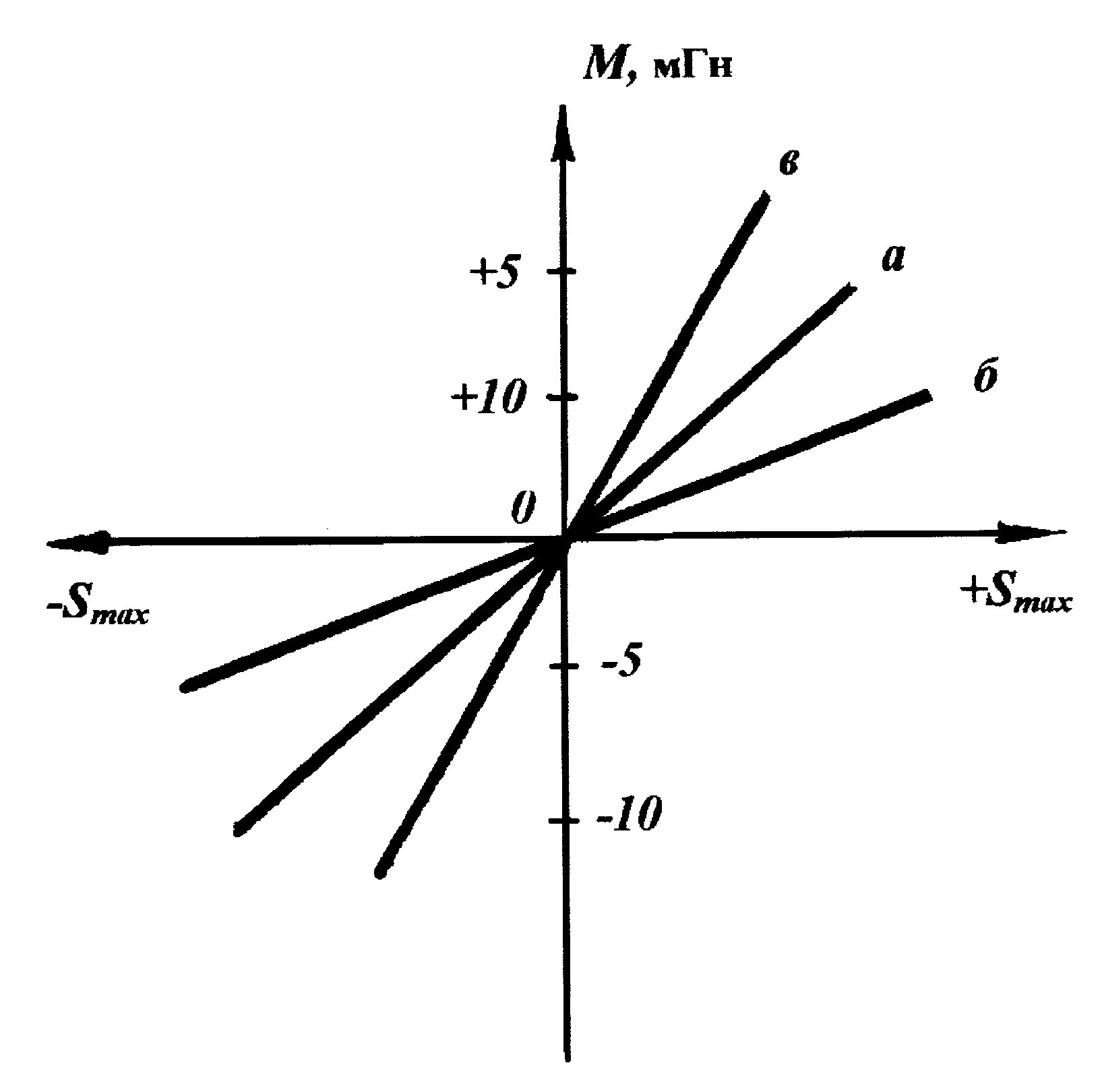
Рис. 13. Характеристика перетворювача ПД при різних зазорах між обмотками
Значення Мн (крутість характеристики перетворювача) можна змінити, зближаючи чи видаляючи один від одного котушки 4 і 8. При зближенні котушок Мн зростає.
На рис. 13. показані характеристики перетворювача в координатах: взаємо індуктивності М і переміщення плунжера S. Характеристика а відповідає деякому середньому зазору між котушками 4 і 8, характеристика "" – зазор більше середньої, характеристики "в" – зазору менше середнього.
Вхідна ЕРС перетворювача
 ,
,
де w=2f (f – частота струму живлення); I – струм живлення перетворювача.
Отже, якщо при регулюванні взаємного положення котушок перетворювача струм живлення його залишається незмінним, значення вихідної ЕРС змінюється пропорційно зміні Мн. Якщо обмотка збудження перетворювача включена на джерело напруги, то при регулюванні взаємного положення котушок струм живлення змінюється так, що при зростанні Мн струм зменшується, і навпаки, тобто в цьому випадку вихідна ЕРС перетворювача змінюється незначно. Таким чином, зміна вихідної ЕРС перетворювача, шляхом регулювання положення котушок, можлива, якщо перетворювач включений на джерело стабілізованого струму чи на джерело напруги послідовно з яким-небудь опором (у схемах , компенсації цим опором є обмотка збудження другого перетворювача ПД).
При послідовно включеному опорі, рівному повному опору обмотки збудження перетворювача, відносна зміна ЕРС при регулюванні взаємного положення котушок складає 12%. Дві однакові котушки 4 і 8 перетворювача укріплені за допомогою стопорних кілець 2 і 9 у магнітних екранах 3 і 7. Котушки 4 і 8 за допомогою гайок 1 і 10 фіксуються на немагнітній трубці 11. Притискання торців екранів з котушками до гайок забезпечується пружиною 5. Зазор між котушками можна змінювати шляхом регулювання положення однієї з гайок 1 чи 10. Плунжер 6 перетворювача зчленовується з кінематикою приладів за допомогою немагнітної пружини 12 з різьбовим наконечником.
Основний недолік трансформаторних перетворювачів - наявність нульового сигналу. Нульовим чи залишковим сигналом, прийнято називати напругу на виході перетворювача при нейтральному положенні його рухливої частини. Присутність нульового сигналу приводить до того, що статистична характеристика перетворювача не проходить через початок координат. У дійсних конструкціях перетворювачів нульовий сигнал, в основному містить основну гармоніку, що обумовлено недостатньою симетрією (геометричної, електричної чи магнітної) перетворювача. При наявності в нульовому сигналі основної гармоніки, синфазної з основним сигналом, вона може бути усунута відповідним зсувом рухливої частини щодо її симетричного положення (зсув "механічного нуля" у "нуль електричний"). Однак у тих випадках, коли через несиметрію перетворювача напруги в лівої і правої половинках вторинної обмотки зрушені по фазі не точно на 180°, основна гармоніка може бути зменшена зсувом рухливої часті лише до величини складової напруги, зрушеної на 90° стосовно фази основної гармоніки (так названої квадратурної складової). У цьому випадку продавлення квадратурної складової нульового сигналу можливо в наступному ланцюзі перетворювачі за допомогою спеціальних фазочутливих пристроїв.