

6.2Выбор модели экскаватора «обратная лопата»
6.2.1 Рекомендуем выбирать модели экскаватора с гидравлическим приводом с максимальной глубиной копания большей чем глубины котлованов на 0,5…1 м при связных и на 1…1,5 м при несвязных грунтах и с учетом наибольшей заполняемости ковшей (см. таблицу А.3). При этом следует указывать в КП исполнения выбранных экскаваторов по вместимости ковшей, характеристикам стрел и рукояти.
6.2.2 Окончательный выбор модели выполняют после проверки возможности его работы «в отвалы» грунта в боковом забое по главным условиям:
- возможности охвата работой с одной стоянки наиболее удаленных точек в зоне разработки (S) и выгрузки в отвал (Т), по рисунку 6.3;
- безопасности работы у бровки откоса.
6.2.3 Возможность охвата крайних точек забоя с отвалом может быть определена графически или по формуле
![]() ,
(6.5)
,
(6.5)
где b1 и b2 – максимально допустимые расстояния от оси проходки экскаватора до точек резания (S) и отсыпки (Т) грунта (ось проходки по берме показана условно) ;
В – заложение откоса, м. В = (Hк - hнед)m0;
Шо – см. формулу (6.2);
Шб – см. п. 6.1.8;
bо – ширина отвала, м. bо = 2 hо (см. п. 6.1.8).
Наибольшие величины b1 и b2 определяются по формулам:
![]() ;
(6.6)
;
(6.6)
![]() ,
(6.7)
,
(6.7)
где Rn – наибольший радиус копания на уровне подошвы откоса, м;
lпер – длина рабочей передвижки экскаватора, которую можно принимать по таблице А.4, м;
Rв – наибольший радиус выгрузки грунта на соответствующей высоте, м.
6.2.4 При отсутствии
графиков траектории режущей кромки
ковша определенной модели «обратной
лопаты», с достаточной степенью точности
Rn
можно
определить с использованием графика
на рисунке 6.4. Для этого следует рассчитать
отношение глубины выемки (Нк)
к максимальной глубине копания грунта
экскаватором выбранного исполнения
![]() и по нему определить отношение Rn/Rmax
= Nn,
соответствующее вышеописанному условию.
Тогда
и по нему определить отношение Rn/Rmax
= Nn,
соответствующее вышеописанному условию.
Тогда
Rn= Rmax• Nn (6.8)
Например, при глубине котлована Нк=2 м, при планировании применения экскаватора Э-5015 с вместимостью ковша 0,5 м3 (-Нmax = 4,5 и Rmax = =7,3 м) результаты определений следующие:
![]() =2/4,5=0,44.
Тогда интервал Nn
= 0,88…0,94.
Принимаем с гарантией Nn
= 0,88, при
котором Rn
= 7,3•0,88
= 6,24 м.
=2/4,5=0,44.
Тогда интервал Nn
= 0,88…0,94.
Принимаем с гарантией Nn
= 0,88, при
котором Rn
= 7,3•0,88
= 6,24 м.
6.2.5 Аналогично, с достаточной степенью точности можно определить и Rв с использованием графика на рисунке 6.5*. Для этого следует рассчитать отношение требуемой высоты выгрузки (Нв) к Rmax и по нему определить отношение Rв/ Rmax = Nв, соответствующее вышеописанному условию. Тогда
Rв= Rmax• Nв (6.9)
Например, при требуемой высоте выгрузки по высоте отвала Нв=2,2 м (экскаватор Э-5015 с = 3,9 м), результаты определений следующие: Нв/ Rmax=2,2/7,3=0,30. Тогда, учитывая вместимость ковша менее 1 м3, интервал Nв = 0,67…0,71. Принимаем с гарантией Nв = 0,67, при котором
________________________________________________________________
*Графики на рисунках 6.4 и 6.5 построены по данным восьми исполнений экскаваторов: РС200-7 и ZX200 японского производства; ЕК220-06, ЕК270-05 и ЕК400-05 российского производства
Rв = 7,3•0,67 = 4,89 м.*
6.2.6 Безопасность работы обеспечивается при условии
b1≥B+1+BoKo (6.10)
где B – см. в формуле (6.5);
Bo – ширина опорного контура экскаватора, м, составляющая от 2,5…2,9 до 3,0…3,9 м у экскаваторов с вместимостью ковшей, соответственно, от 0,4…1,0 до 1,25…2,5 м3 [12];
Ko – коэффициент, учитывающий положение бровки откоса относительно крайней точки опоры – Q.
Ko=0,5…0,7.**
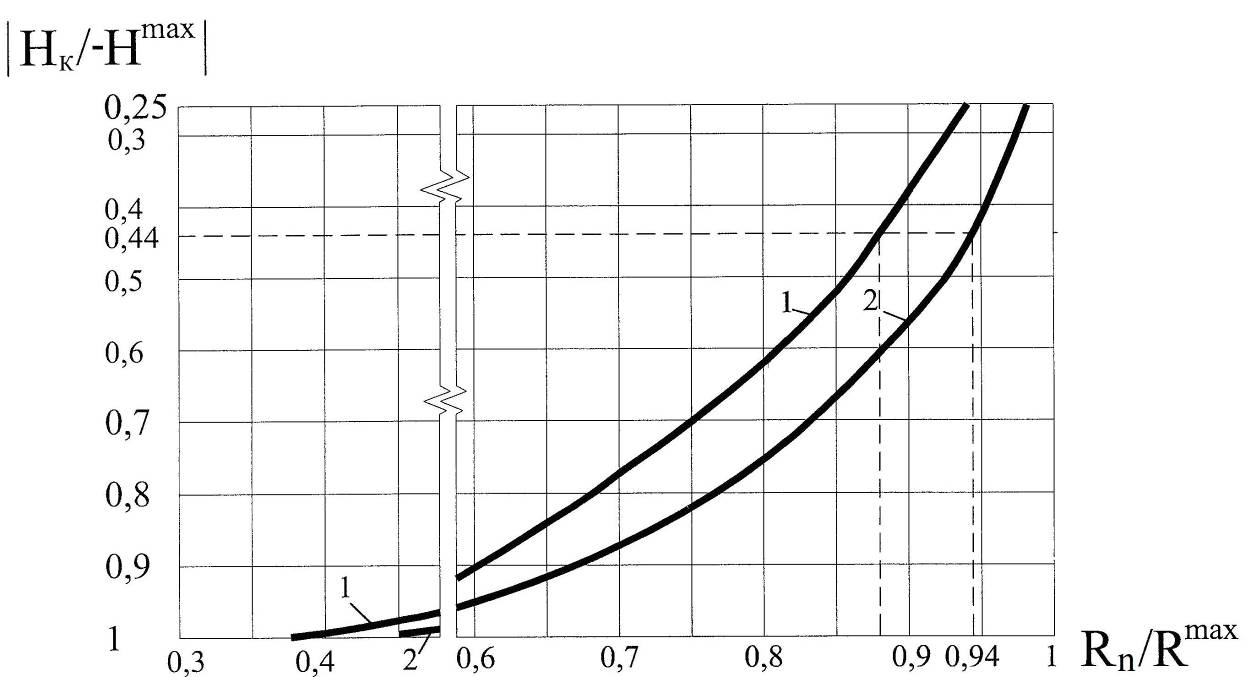
1,2 – линии границ максимальных величин Rn / Rmax
Рисунок 6.4 – График для определения радиуса резания грунта экскаваторами «обратная лопата» у подошвы откосов, Rn
6.2.7 Значительное
превышение левой части формулы (6.5) над
правой позволяет выгрузку грунта
осуществлять на большем радиусе
![]() (вместо Rв)
в точку Т'
(вместо Т),
уменьшая угол поворота платформы
экскаватора, или смещать ось его пути
(см. рисунок 6.3).
(вместо Rв)
в точку Т'
(вместо Т),
уменьшая угол поворота платформы
экскаватора, или смещать ось его пути
(см. рисунок 6.3).
________________________________________________________________
* При погрузке грунта в автосамосвал высота выгрузки должна быть выше борта кузова не менее чем на 0,5…1 м
**Для пневмоколесных экскаваторов следует принимать Ко ≥ 0,7 с учетом расположения выносных опор
6.2.8 Поперечное сечение части котлована, грунт из которой предназначен для перемещения на карту насыпи вначале лобовым, а затем
боковым (боковыми) забоем (забоями), приведен на рисунке 6.6. Границы забоев (проходок) определяются рабочими параметрами экскаватора.
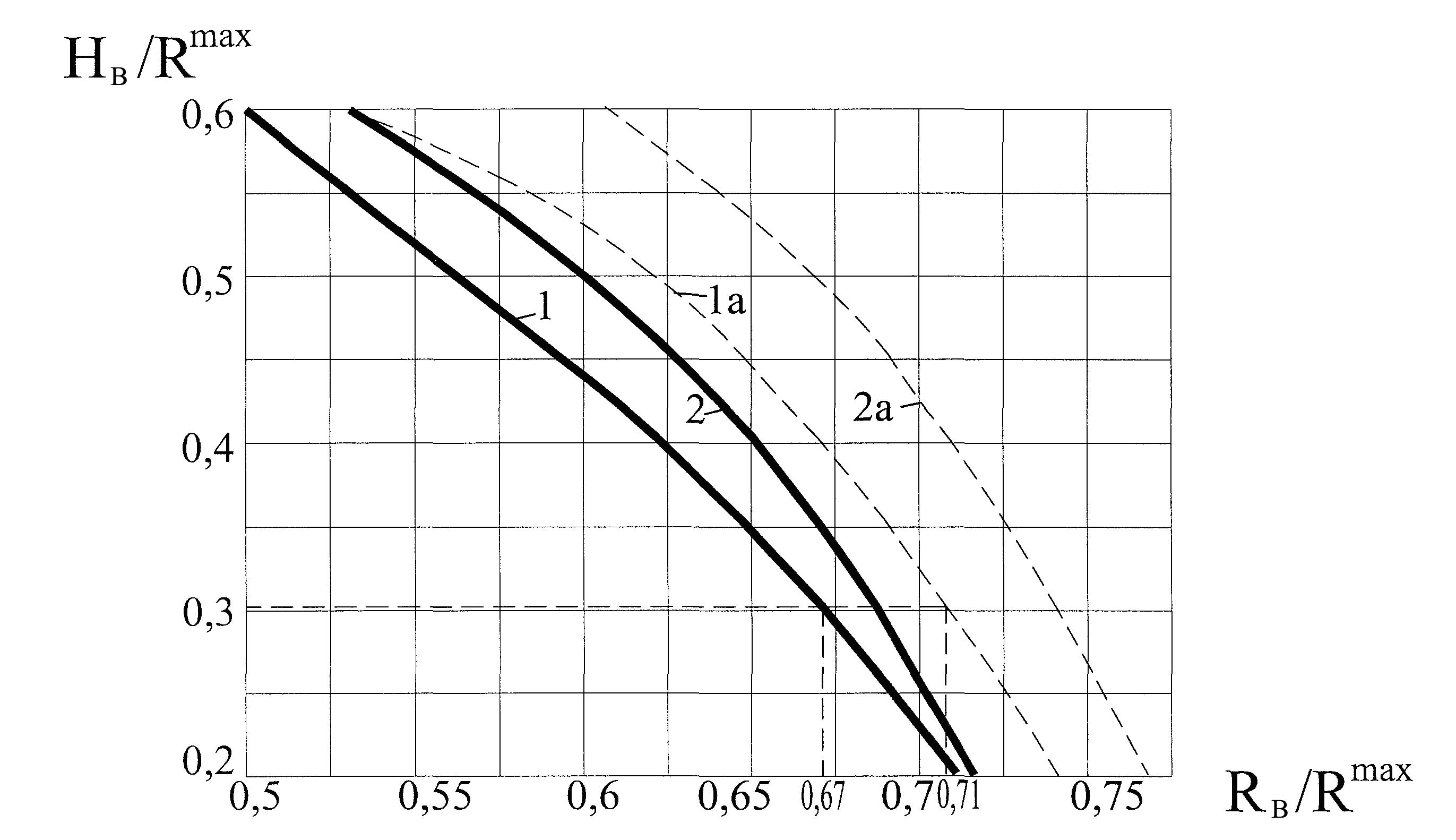
1,1а – линии границ максимальных величин Rв / Rmax для экскаваторов с вместимостью ковшей 0,8…1 м3 (Rmax = 8,8…10,0 м); 2,2а – то же, для экскаваторов с вместимостью ковшей 1,2…1,9 м3 (10,0..11,9 м)
Рисунок 6.5 – График для определения радиуса выгрузки грунта экскаваторами «обратная лопата», Rв
6.2.9 Расстояние b1 определяют по формуле (6.6) с соблюдением условия (6.10), а b3 в КП можно принимать до 0,75R0. Расположение автосамосвала должно отвечать условиям:
центр кузова должен располагаться по дуге радиуса не более Rв;
между окружностью, описываемой хвостовой частью экскаватора, и выступающими частями автосамосвала должен быть интервал шириной не менее 1 м;
как и экскаватор, автосамосвал должен двигаться и устанавливаться на расстоянии не ближе 1 м от бровок выемок (за пределами призмы обрушения грунта).