

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
Факультет інженерної механіки
та машинобудування
Кафедра ОПМ
КУРСОВИЙ ПРОЕКТ
з дисципліни "Теорія механізмів і машин"
на тему:
"ПРОЕКТУВАННЯ ТА ДОСЛІДЖЕННЯ МЕХАНІЗМІВ КОНВЕЄРА"
ВАРІАНТ №27
Виконавець студент групи ОПТ-09 В.Г. Смоляга
Керівник проекту Є.Л.Гордіенко
Нормоконтролер Є.Л.Гордіенко
ДОНЕЦЬК – 2011
РЕФЕРАТ
Курсовий проект: 31 сторінки, 4 рисунків, 6 таблиць, 1 додаток на листі формату А2, 2 додатки на листах формату А1.
Об'єкт проектування та дослідження – механізми конвейєра: важільний, зубчастий, кулачковий.
Мета роботи – синтез і аналіз цих механізмів.
При проектуванні і дослідженні механізмів використані графічні і аналітичні методи з використанням ЄОМ.
ВАЖІЛЬНИЙ МЕХАНІЗМ, ШВИДКОСТІ, ПРИСКОРЕННЯ, МОМЕНТ, МЕТОД БРУЄВИЧА, СПОСОБ ЖУКОВСЬКОГО, ПЛАНЕТАРНИЙ МЕХАНІЗМ, ЗУБЧАСТА ПЕРЕДАЧА, ЕВОЛЬВЕНТА, ПЛАНЕТАРНИЙ МЕХАНІЗМ, МЕТОД ВІЛЛІСА, САТЕЛІТ, КУЛАЧОК.
СОДЕРЖАНИЕ
Введение 5
1 Структурный и кинематический анализ рычажного механизма 7
1.1 Структурный анализ механизма 7
1.2 Построение планов механизма, скоростей и ускорений 8
2 Силовое исследование рычажного механизма 11
2.1 Определение масс звеньев, сил тяжести, и центральных моментов инерции 11
2.2 Определение сил реакций в кинематических парахи уравновеши-
вающего момента методом академика Бруевича 12
2.3 Проверка уравновешивающего момента по способу Жуковского 13
3 Синтез зубчатого редуктора 15
3.1 Расчет геометрических параметров зубчатой передачи 1-2 15
3.2 Проверка качества зубьев и зацепления 19
3.3 Вычисление контрольных размеров 20
3.4 Построение эвольвентного зацепления 21
3.5 Подбор чисел зубьев колес планетарной передачи 22
3.6 Кинематическое исследование зубчатого редуктора двумя методами 23
4 Проектирование кулачкового механизма 27
4.1 Определение законов движения толкателя и построение их графиков 27
4.2 Построение профилей кулачка 29
Выводы 30
ПЕРЕЧЕНЬ ССЫЛОК 31
ВВЕДЕНИЕ
Целью курсового проекта является проектирование и исследование рычажного, зубчатого и кулачкового механизмов конвейера.

Рисунок 1 – Схема рычажного механизма
От двигателя с помощью зубчатого редуктора (рис. 2) вращательное движение передается на главный валО, на котором закреплен кулачок и кривошип 1 (рис. 1). От кривошипа звеньями 2, 3 и 4 рычажного механизма движение передаетсяжелобу 5, на котором находится какой-нибудь груз. При движении желоба вправо (рабочий ход) происходит перемещение груза, движение влево – холостой ход. Кулачковый механизм (рис. 3) преобразует вращательное движение вала редуктора в возвратно-вращательное движение толкателя.
Исходные данные: тип
диаграммы ускорения толкателя
– 4.
тип
диаграммы ускорения толкателя
– 4.
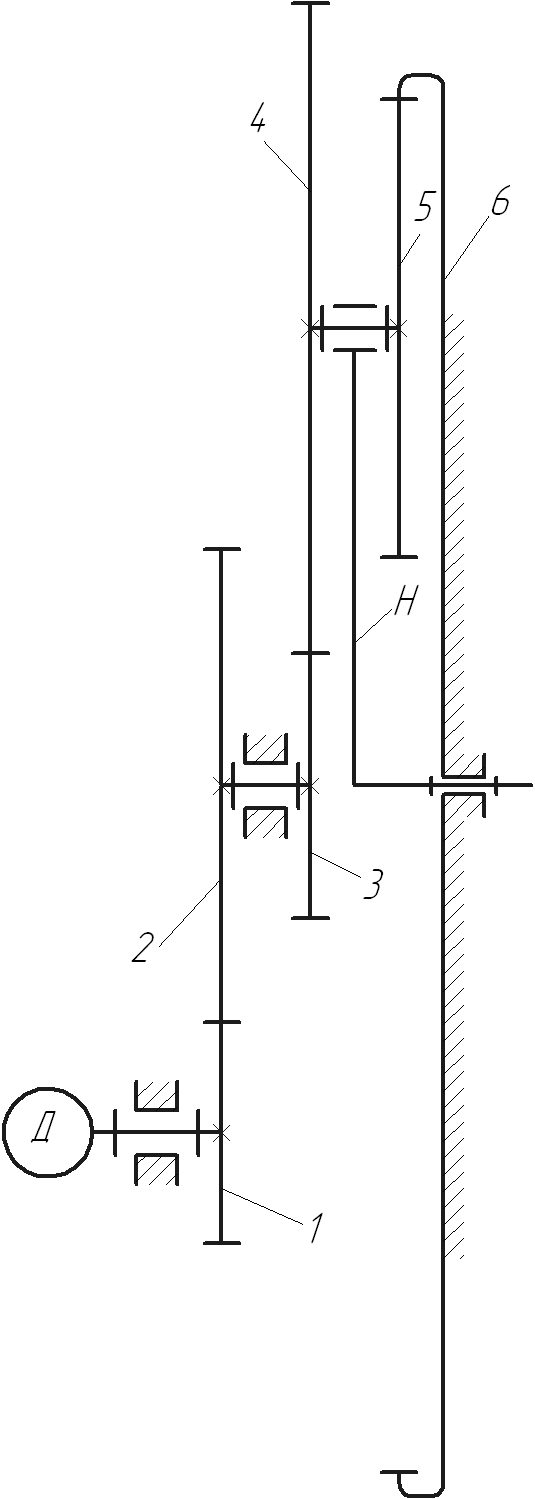
Рисунок 2 – Кинематическая схема редуктора
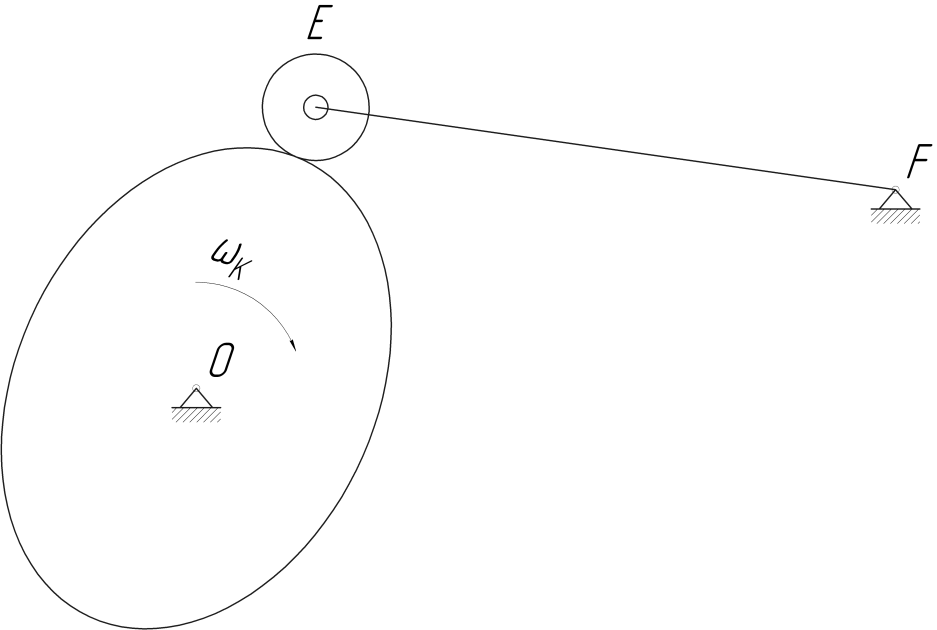
Рисунок 3 – Схема кулачкового механизма
1 Структурный и кинематический анализ рычажного механизма
Структурный анализ рычажногомеханизма
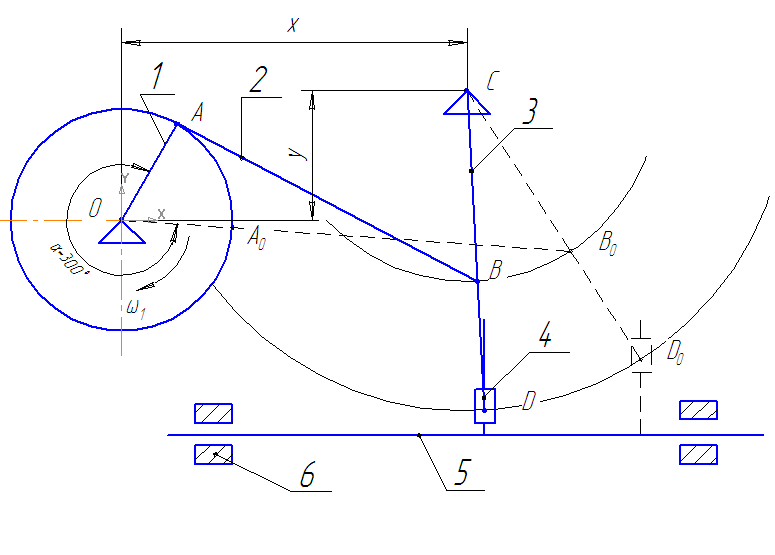
Рисунок 1.1 – Схема рычажного механизма
Таблица 1.1 – Характеристика звеньев
№ звена |
Название звена |
Вид абсолютного движения звена |
1 |
кривошип |
вращательное |
2 |
шатун |
плоскопараллельное |
3 |
коромысло |
возвратно-вращательное |
4 |
ползун |
плоскопараллельное |
5 |
желоб |
поступательное |
6 |
стойка |
неподвижная |
Анализ кинематических пар:
1-6: низшая, плоская (относительное движение вращательное), одноподвижная;
1-2: низшая, плоская (относительное движение вращательное), одноподвижная;
2-3: низшая, плоская (относительное движение вращательное), одноподвижная;
3-4: низшая, плоская (относительное движение вращательное), одноподвижная;
3-6: низшая, плоская (относительное движение вращательное), одноподвижная;
4-5: низшая, плоская (относительное движение поступательное), одноподвижная;
5-6: низшая, плоская (относительное движение поступательное), одноподвижная.
Данная кинематическая цепь замкнутая (т.к. все звенья входят не менее чем в две кинематические пары), плоская (т.к. каждое звено относительно всех остальных звеньев совершает плоское движение) и сложная (т.к. звенья 3 и 6 входят в три кинематические пары).