

Тема 2. Общие сведения о деталях и механизмах приборов
1 Структурная схема измерительного прибора.
Под измерительным прибором понимается средство измерений, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия наблюдателем.
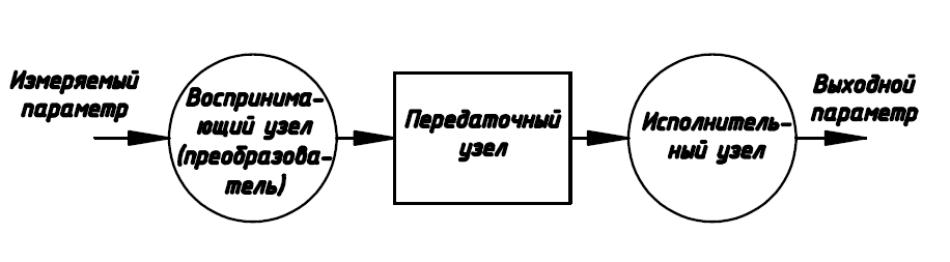
Структурная схема измерительного прибора
Под воспринимающим узлом в механических приборах обычно понимается чувствительный элемент, который деформируется или перемещается под действием изменения измеряемой величины. В электрических приборах чувствительным элементом-преобразователем обычно является устройство, преобразующее изменение измеряемой величины в изменение того или иного электрического параметра.
Деформация чувствительного элемента (пружины, мембраны, сильфона) или электрический сигнал от преобразователя должны быть значительно увеличены или усилены, чтобы обеспечить срабатывание исполнительного органа или повысить точность отсчета. В механических приборах эта операция производится передаточно-множительным механизмом, а в электрических эту функцию выполняет, как правило, усилитель.
Для отсчета или регистрации исследуемой величины служит исполнительный узел прибора, который в зависимости от вида измерительной системы может быть отсчетным устройством (показывающие приборы), регистрирующим устройством (самопишущие приборы), механизмом позиционного регулирования (контактные приборы).
В качестве примера рассмотрим основные узлы пружинного манометра, служащего для измерения избыточного давления. В этом приборе давление воспринимается трубчатой пружиной 1. Преобразующий механизм состоит из шестерни 2 и зубчатого сектора 3 с кривошипно-шатунным механизмом 4. Роль исполнительного узла выполняет обычное отсчетное устройство, состоящее из шкалы 6 и указателя 5.

Схема пружинного манометра
2 Уравнение принципа действия.
Во многих приборах измеряемая величина преобразуется в действующую силу или действующий момент, которые вызывают угловое или линейное перемещение подвижной системы. Следовательно, между силой (моментом) и измеряемой величиной существует определенная функциональная зависимость, которая в общем виде может быть записана:
МД = f (Х) (1а)
Ра = φ (Х) (1б)
где МД – действующий момент; Ра – действующая сила; X – измеряемая величина.
Выражения (1) называются уравнениями принципа действия прибора.
В статическом режиме измерения подвижная система должна находиться в равновесии. Уравновешивание системы обеспечивается противодействующим моментом или силой, величины которых должны быть пропорциональны углу поворота или линейному перемещению подвижной системы прибора:
Мпр = f1(φ) или Рпр = φ1 (l),
где Мпр – противодействующий момент; Рпр – противодействующая сила; φ – угол поворота подвижной системы; l – линейное перемещение подвижной системы.
3 Структура механизмов приборов
Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном; в этой цепи заданному движению одного или нескольких ведущих звеньев соответствует вполне определенное движение каждого из ведомых звеньев.
Механизмы делятся на плоские и пространственные. Плоским механизмом называется такой, все звенья которого перемещаются в одной или в нескольких параллельных плоскостях. Механизмы, не удовлетворяющие этому условию, откосятся к пространственным.
Кинематическая цепь механизма состоит из звеньев и кинематических пар. Звеном принято называть совокупность жестко связанных между собой деталей, находящихся в определенном движении.
Кинематической парой называется комбинация двух звеньев, соединение которых обеспечивает возможность движения одного из них относительно другого.
Ведущим звеном механизма называется звено, соединенное с источником механической энергии; закон его движения заранее известен. Ведомыми называются звенья, движение которых определяется движением ведущих звеньев.
Как известно, свободное твердое тело имеет шесть степеней свободы. Тогда кинематическая цепь в общем случае имеет следующее число степеней свободы:
w = 6п – 5р5 – 4р4 – Зр3 – 2р2 – р1 .
Если одно из звеньев цепи неподвижно, как это имеет место в реальных механизмах, то число ее степеней свободы уменьшается на шесть и структурная формула принимает вид
w = 6 (n – 1) – 5р5 – 4р4 – Зр3 – 2р2 – р1 .
Структурная формула для плоского механизма, имеющего р4 пар 4-го класса и р5 пар 5-го класса, будет иметь следующий вид:
w = 3 (n – 1) – 2р5 – р4 .
Полученная зависимость называется формулой П. Л. Чебышева.
При проектировании механизмов надо иметь в виду, что всегда w > 0 и должно быть равно числу ведущих звеньев. На практике преимущественное распространение получили плоские механизмы с одной степенью свободы и, следовательно, с одним ведущим звеном.
Рассмотрим виды приборов по назначению.
Измерительный прибор – средство измерения, предназначенное для выработки сигнала измерительной информации в виде, доступном для непосредственного восприятия оператором. Характерный признак – наличие отсчетного или записывающего (печатающего) прибора.
Контрольный прибор – средство, при помощи которого определяют, находится контролируемая величина в заданных пределах или нет. Контрольный прибор в отличие от измерительного не позволяет определять действительное значение измеряемой величины.
Регулирующий прибор – средство для поддержания регулируемой величины в заданных пределах, обусловленных ходом какого-либо процесса.
Управляющий прибор – средство для измерения какой-либо величины, характеризующей процесс, по заданной программе или в зависимости от хода процесса.
Специальные приборы – средства, применяемые для научных исследований и в установках специального назначения. [А.5]