

Міністерство освіти і науки України
Національний Університет ”Львівська Політехніка”
Кафедра автоматизації теплових
та хімічних процесів
ЕКСПЕРИМЕНТАЛЬНЕ ВИЗНАЧЕННЯ СТАТИЧНОЇ
ХАРАКТЕРИСТИКИ ПРОПОРЦІЙНОГО РЕГУЛЯТОРА
Тиску прямої дії Інструкція
до лабораторної роботи №1
з курсу ”Основи автоматики і автоматизації”
Львів 2006
Експериментальне визначення статичної характеристики пропорційного регулятора тиску прямої дії: Методичні вказівки та інструкція до лабораторної роботи № 1 з дисципліни “Основи автоматики та автоматизації” для студентів базового напряму 6.092500 “Автоматизація та комп’ютерно-інтегровані технології” / Укл.: І.Д.Стасюк, Я.П.Юсик. - Львів: Видавництво Національного університету „Львівська політехніка”, 2006.
Укладачі: Стасюк І.Д., канд. техн. наук, доцент
Юсик Я.П., канд. техн. наук, доцент
Відповідальний за випуск Пістун Є.П., д-р техн. наук, професор
Рецензенти: Крих Г.Б., канд. техн. наук, доцент
Савицький В.К., канд. техн. наук, доцент
Необхідна підготовка: знання будови і принципу роботи автоматичних пропорційних регуляторів тиску прямої дії, а також функційного призначення кожного з елементів регулятора; розуміння таких понять як вхідна та вихідна величини регулятора, його статична характеристика, коефіцієнт передачі та границі пропорційності регулятора.
Мета роботи - набуття навичок проведення експериментальних досліджень автоматичних регуляторів прямої дії та визначення статичної характеристики і параметрів настроювання автоматичного регулятора; практичне ознайомлення з роботою пропорційних регуляторів тиску прямої дії.
Основні Теоретичні відомості
Одними із основних складових частин автоматизації технологічних процесів є системи автоматичного регулювання. Системою автоматичного регулювання (САР) називають сукупність взаємодіючих між собою об’єкта регулювання (ОР) і автоматичного регулятора (АР). САР призначена для підтримування постійного заданого значення регульованої величини (або величин) із потрібною точністю або для зміни цієї величини за наперед заданим чи невідомим законом, коли процеси керування об’єктом регулювання здійснюються автоматично без участі людини.
На роботу САР впливають як внутрішні фактори (вихід з ладу окремих елементів, спотворення інформації), так і зовнішні відносно САР фактори (завади, похибки у початкових даних, зміна параметрів довкілля тощо). Вказані вище фактори, які порушують роботу САР, називають збурюючими діями, або просто збуреннями. Сучасні САР забезпечують таке регулювання, при якому наслідки збурень в значній мірі усуваються.
Проходження теплофізичних і хіміко-технологічних процесів у тому чи іншому апараті, який і являє собою ОР, визначається багатьма факторами (технологічними параметрами). Як правило, задана якість отримуваного продукту залежить від чітко регламентованих (часто постійних) значень технологічних параметрів, які при функціонуванні апарату потрібно підтримувати в певних заданих межах. Під впливом зовнішніх і внутрішніх збурень технологічні параметри можуть відхилятися від своїх регламентованих значень, що одразу ж відбивається на якості продукції. У таких випадках САР, автоматично змінюючи положення регулюючих органів керованого апарату і змінюючи деяку величину, яка має найбільший вплив на регульовану величину, знову відновлює задане значення регульованого технологічного параметра.
Отже, стабілізація (підтримування на заданому значенні) технологічних параметрів (температури, тиску, витрати, концентрації тощо) в ОР (машині, апараті, агрегаті, установці) і є основним завданням САР, блок-схема якої зображена на рис. 1.
У
загальному випадку вирішення такого
завдання схематично можна уявити з рис.
1. Вихідний сигнал
![]() пристрою керування (ПК), який діє на
регулюючий орган (РО) і таким чином
змінює вхідну величину ОР, являється
деякою функцією різниці (відхилення)
між заданим значенням технологічного
параметра
пристрою керування (ПК), який діє на
регулюючий орган (РО) і таким чином
змінює вхідну величину ОР, являється
деякою функцією різниці (відхилення)
між заданим значенням технологічного
параметра
![]() і його поточним значенням
і його поточним значенням
![]() ,
яке для ПК є вхідним сигналом
,
яке для ПК є вхідним сигналом
![]() ,
тобто
,
тобто
![]() .
.
На
ОР можуть впливати і зовнішні збурення
![]() (наприклад, температура довкілля тощо),
які також викликають різницю між
і
,
і, отже додаткову регулюючу дію
(наприклад, температура довкілля тощо),
які також викликають різницю між
і
,
і, отже додаткову регулюючу дію
![]() .
.
ПК
у загальному випадку, блок-схема якого
показана на рис. 2, складається із таких
основних функційних елементів як елемент
порівняння (ЕП), обчислювальний
(регулюючий) пристрій (ОП) і виконавчий
механізм (ВМ). ЕП служить для вимірювання
різниці (відхилення)
![]() .
ОП на основі вихідного сигналу ЕП,
рівного ,
формує за встановленими правилами
(алгоритмом) сигнал
.
ОП на основі вихідного сигналу ЕП,
рівного ,
формує за встановленими правилами
(алгоритмом) сигнал
![]() ,
який керує ВМ для відповідного переміщення
РО, з допомогою якого здійснюється зміна
вхідної величини
,
який керує ВМ для відповідного переміщення
РО, з допомогою якого здійснюється зміна
вхідної величини
![]() об’єкта регулювання до моменту усунення
відхилення .
Вхідною величиною ОР, від значення якої
залежить значення регульованого
технологічного параметра
(вихідної величини ОР), можуть бути, як
правило, матеріальний або енергетичний
потоки.
об’єкта регулювання до моменту усунення
відхилення .
Вхідною величиною ОР, від значення якої
залежить значення регульованого
технологічного параметра
(вихідної величини ОР), можуть бути, як
правило, матеріальний або енергетичний
потоки.

Рис. 1. Блок-схема системи автоматичного регулювання:
ОР - об’єкт регулювання; ПК - пристрій керування; РО - регулюючий орган.
ОП разом із ЕП утворюють автоматичний регулятор (АР). У більшості випадків сигнал на виході АР є малопотужним для безпосередньої дії на РО. У цих випадках після АР застосовують виконавчий механізм (ВМ), потужність якого (електромотори, пневмоприводи тощо) є достатньою для переміщення РО і переведення ОР з одного стану в інший.

Рис. 2. Блок-схема пристрою керування (ПК) у системі автоматичного регулювання:
ЕП – елемент порівняння; ОП - обчислювальний (регулюючий) пристрій; АР - автоматичний регулятор; ВМ - виконавчий механізм.
Як
приклад розглянемо роботу САР тиску
газу в ресивері, схема якої зображена
на рис. 3. Завдання даної САР полягає в
тому, щоб забезпечити в ресивері 1
(об’єкті регулювання) постійне значення
тиску газу
![]() незалежно від витрати
незалежно від витрати
![]() цього газу, яку встановлюють відповідним
відкриттям вентиля 8 (залежно від потреб
споживачів у газі). Через клапан 11, який
в даній САР є РО, газ поступає в ресивер,
створюючи в ньому певний тиск. Потім
через вентиль 8 газ поступає до споживачів.
Для забезпечення постійного значення
тиску
регулюють (змінюють) витрату
цього газу, яку встановлюють відповідним
відкриттям вентиля 8 (залежно від потреб
споживачів у газі). Через клапан 11, який
в даній САР є РО, газ поступає в ресивер,
створюючи в ньому певний тиск. Потім
через вентиль 8 газ поступає до споживачів.
Для забезпечення постійного значення
тиску
регулюють (змінюють) витрату
![]() газу, який поступає в ресивер, зміною
положення затвора 2 відносно сідла 3
клапана 11, зрівнюючи витрату
з витратою
.
газу, який поступає в ресивер, зміною
положення затвора 2 відносно сідла 3
клапана 11, зрівнюючи витрату
з витратою
.
Розглянемо
роботу автоматичного регулятора, роль
якого в даній САР виконує рухомий
механізм, до складу якого входять
мембрана 5, пружина 4 і шток 10. На мембрану
5 діє два зусилля: зверху зусилля
![]() ,
створюване регульованим тиском
,
а знизу зусилля
,
створюване регульованим тиском
,
а знизу зусилля
![]() ,
яке створюється пружиною 4. Під дією
різниці цих зусиль
,
яке створюється пружиною 4. Під дією
різниці цих зусиль
![]() мембрана разом із штоком 10 і затвором
клапана переміщується в напрямку меншого
зусилля до тих пір, поки
не стане рівним
,
тобто
мембрана разом із штоком 10 і затвором
клапана переміщується в напрямку меншого
зусилля до тих пір, поки
не стане рівним
,
тобто
![]() .
Використовуючи пристрій для попереднього
стиснення пружини 4 (на рис. 3 він не
зображений) і вимірювальний прилад 9,
при деякій заданій витраті газу
встановлюють у ресивері задане значення
тиску
.
Використовуючи пристрій для попереднього
стиснення пружини 4 (на рис. 3 він не
зображений) і вимірювальний прилад 9,
при деякій заданій витраті газу
встановлюють у ресивері задане значення
тиску
![]() .
При цьому
.
При цьому
![]() (тобто
),
і затвор клапана займає відносно сідла
деяке фіксоване положення, яке відповідає
відкриттю РО приблизно на 50 %.
(тобто
),
і затвор клапана займає відносно сідла
деяке фіксоване положення, яке відповідає
відкриттю РО приблизно на 50 %.

Рис. 3. Принципова схема системи автоматичного регулювання тиску газу в ресивері:
1 - ресивер; 2 і 3 - відповідно затвор і сідло клапана; 4 - пружина; 5 - мембрана; 6 - корпус мембранного пристрою; 7 - сигнальна трубка, що з’єднує ресивер (об’єкт регулювання) із мембранним пристроєм (чутливим елементом); 8 - вентиль, яким встановлюють витрату газу для споживачів; 9 - прилад (манометр) для вимірювання тиску газу в ресивері; 10 - шток; 11 - корпус регулюючого клапана.
Отже, розглядувана САР працює так.
Допустимо,
що витрата газу
,
використовуваного споживачами,
збільшилася. Внаслідок цього регульований
тиск
зменшиться на деяку величину
![]() ,
що призведе до зменшення зусилля тиску
на мембрану 5 і відповідно до порушення
балансу сил, які діють на мембрану (вниз
зусилля регульованого тиску, а вгору
зусилля пружини 4). Мембрана разом із
затвором 3 клапана почне переміщуватися
вгору, збільшуючи ступінь відкриття
РО. При цьому збільшується подача газу
в ресивер і, відповідно, збільшується
тиск газу в ресивері. Переміщення затвору
клапана і збільшення тиску газу в
ресивері будуть тривати до тих пір, поки
не відновиться баланс сил на мембрані,
який відповідає заданому значенню
,
що призведе до зменшення зусилля тиску
на мембрану 5 і відповідно до порушення
балансу сил, які діють на мембрану (вниз
зусилля регульованого тиску, а вгору
зусилля пружини 4). Мембрана разом із
затвором 3 клапана почне переміщуватися
вгору, збільшуючи ступінь відкриття
РО. При цьому збільшується подача газу
в ресивер і, відповідно, збільшується
тиск газу в ресивері. Переміщення затвору
клапана і збільшення тиску газу в
ресивері будуть тривати до тих пір, поки
не відновиться баланс сил на мембрані,
який відповідає заданому значенню
![]() регульованого тиску
.
регульованого тиску
.
І
навпаки, при зменшенні витрати газу
,
використовуваного споживачами, тиск в
ресивері зросте на деяку величину
![]() .
Це викличе порушення балансу сил на
мембрані в протилежну сторону. Мембрана
разом із затвором почне переміщуватися
вниз, зменшуючи ступінь відкриття РО
і, відповідно, зменшуючи подачу газу
в ресивер. При цьому тиск в ресивері
буде зменшуватися і наближатися до
значення, близького заданому значенню
.
.
Це викличе порушення балансу сил на
мембрані в протилежну сторону. Мембрана
разом із затвором почне переміщуватися
вниз, зменшуючи ступінь відкриття РО
і, відповідно, зменшуючи подачу газу
в ресивер. При цьому тиск в ресивері
буде зменшуватися і наближатися до
значення, близького заданому значенню
.
Використовуючи
блок-схему, зображену на рис. 2, проаналізуємо
розглянуту САР тиску газу (див. рис. 3),
тобто виділимо окремі її функційні
елементи. ОР складають ресивер 1 разом
з ділянкою газопроводу, по якому газ
подається в ресивер (від місця забору
трубкою 7 сигналу про регульований тиск
до регулюючого клапана 11). Вихідною
величиною
ОР є поточне значення тиску
в ресивері, а сигналом керування
,
тобто вхідною величиною ОР, - переміщення
затвора регулюючого клапана (ступінь
відкриття РО). У даній САР тиску газу ПК
конструктивно виконаний як єдиний
пристрій, який містить мембрану 5, шток
10 і пружину 4. Разом вони виконують
функції ЕП і ОП, тобто утворюють АР. Роль
власне ЕП виконує мембрана, а завданням
![]() на вході АР служить зусилля пружини
на вході АР служить зусилля пружини
![]() ,
встановлюване попереднім її стисненням.
Збуреннями
є зміни тиску в газопроводі перед РО та
зміни витрати газу, використовуваного
споживачами.
,
встановлюване попереднім її стисненням.
Збуреннями
є зміни тиску в газопроводі перед РО та
зміни витрати газу, використовуваного
споживачами.
Однією
із найважливіших особливостей САР є
наявність в них зворотного зв’язку.
Суть зворотного зв’язку полягає в тому,
що інформація з виходу системи, тобто
сигнал, пропорційний значенню регульованої
величини, поступає на вхід даної системи.
Так, для забезпечення заданого значення
технологічного параметра, тобто заданого
значення вихідної величини ОР, на вході
АР потрібна інформація про поточне
(дійсне) значення цього параметра
,
щоб порівняти його із заданим значенням
і отримати різницю
![]() ,
яка характеризує величину відхилення
регульованого параметра від заданого
значення. Тобто в реальних САР значення
регульованого параметра з виходу системи
подається на її вхід, де обчислюється
,
яка характеризує величину відхилення
регульованого параметра від заданого
значення. Тобто в реальних САР значення
регульованого параметра з виходу системи
подається на її вхід, де обчислюється
![]() .
Цей принцип побудови САР отримав назву
принципу зворотного зв’язку, а САР
називається замкнутою.
.
Цей принцип побудови САР отримав назву
принципу зворотного зв’язку, а САР
називається замкнутою.
В розглянутій вище САР (див. рис. 3) зворотний зв’язок забезпечується за допомогою сигнальної трубки 7. Вихідний сигнал системи, тобто регульований тиск газу в ресивері, по трубці 7 поступає на вхід системи і сприймається її ЕП, роль якого виконує мембрана 5. Такий зворотний зв’язок називають зовнішнім.
Крім вище описаного зовнішнього зворотного зв’язку, у розглядуваній САР тиску газу в ресивері наявний також і внутрішній зворотний зв’язок, яким охоплений АР. Вихідний сигнал АР, яким є переміщення затвора регулюючого клапана, за допомогою пружини 4, величина стиснення якої залежить від цього переміщення, подається на вхід АР, тобто сприймається його ЕП - мембраною. Такий зворотний зв’язок, при якому вихідний сигнал АР постійно діє на його вхід у протилежному напрямку до основної дії, називають жорстким від’ємним зворотним зв’язком. Він сприяє поверненню САР до рівноважного стану в міру усунення нею впливу збурення і забезпечує пропорційну залежність між вихідним і вхідним сигналами АР.
При аналізі та синтезі САР застосовують різні форми їх опису, зокрема опис САР може бути словесним, у вигляді структурної схеми або у формі математичних залежностей.
Структурна схема САР зображається за допомогою прямокутників та ліній із стрілками, які відповідно відтворюють окремі її ланки та канали зв’язку, що з’єднують виходи попередніх ланок із входами наступних за ними ланок даної САР і вказують на напрям проходження сигналу в ланках та системі в цілому, тобто інформують про напрямленість дії цих ланок.
Напрямленість дії - це така властивість ланки, яка забезпечує передачу інформації від входу ланки до її виходу тільки в одному напрямку і при цьому наступні ланки не впливають на попередні, тобто вони практично є незалежними елементами САР.
Ланкою САР називають такий найменший за функційним призначенням її елемент, який вже не можна розділяти на окремі частини за функційними чи якими-небудь іншими ознаками.
Найповнішу уяву про САР забезпечує її математичний опис, який ще називають математичною моделлю, оскільки саме він дозволяє розраховувати кількісні характеристики, що визначають властивості САР.
Математичну модель САР складають на основі математичних моделей окремих ланок, які утворюють аналізовану САР, і зв’язків між ланками. Для математичного опису ланки в усталеному режимі її роботи складають рівняння її статичної характеристики.
Статичною характеристикою ланки називають залежність її вихідної величини від вхідної в усталеному режимі, тобто при відсутності будь-яких змін інформації, маси, енергії в ланці. Аналітично статичну характеристику виражають так:
![]() ,
,
де
![]() і
і
![]() - відповідно вхідна і вихідна величини
ланки;
- відповідно вхідна і вихідна величини
ланки;
![]() - деяка функція, яка встановлює зв’язок
між вхідною
і вихідною
величинами ланки.
- деяка функція, яка встановлює зв’язок
між вхідною
і вихідною
величинами ланки.
Крім об’єкта регулювання (ОР), до основних ланок САР належить і автоматичний регулятор (АР). Автоматичним регулятором називають технічний пристрій, який призначений для вироблення сигналів керування, що забезпечують протікання технологічного процесу в ОР в бажаному напрямку, зокрема для підтримування вихідної величини ОР на заданому рівні або для її зміни за певним законом у часі із заданою точністю.
Використовувані в різних галузях промисловості АР класифікують за багатьма ознаками. Серед таких ознак є вид регульованої величини, вид використовуваної енергії, конструктивне виконання, характер зв’язку між вхідною і вихідною величинами (закон регулювання) тощо.
Найважливішою із перелічених класифікаційних ознак є остання - за законом регулювання. Саме класифікація АР за законом регулювання дозволяє чітко розділити все розмаїття АР на порівняно невелике число їх видів. Слід зауважити, що від цієї ознаки суттєво залежить і якість регулювання.
Отже, за законом регулювання АР розділяють на:
позиційні (Пз-регулятори);
пропорційні (П-регулятори);
інтегральні (І-регулятори);
пропорційно-інтегральні, або ізодромні (ПІ-регулятори);
пропорційно-диференціальні (ПД-регулятори);
пропорційно-інтегрально-диференціальні (ПІД-регулятори).
Досліджуваний
в даній лабораторній роботі АР відноситься
до пропорційних регуляторів, які формують
закон регулювання, згідно з яким зміна
вихідної величини
![]() регулятора є пропорційною зміні його
вхідної величини
регулятора є пропорційною зміні його
вхідної величини
![]() ,
тобто
,
тобто
![]() ,
(1)
,
(1)
де
![]() - переміщення регулюючого органу (вихідна
величина регулятора);
- переміщення регулюючого органу (вихідна
величина регулятора);
![]() - відхилення регульованої величини від
заданого значення (вхідна величина
регулятора);
- задане значення регульованої величини;
- відхилення регульованої величини від
заданого значення (вхідна величина
регулятора);
- задане значення регульованої величини;
![]() - значення ступеня відкриття РО (вихідної
величини АР) в усталеному стані САР, яке
відповідає
;
- значення ступеня відкриття РО (вихідної
величини АР) в усталеному стані САР, яке
відповідає
;
![]() i
i
![]() - поточні значення відповідно регульованої
величини і ступеня відкриття РО в даний
момент часу;
- поточні значення відповідно регульованої
величини і ступеня відкриття РО в даний
момент часу;
![]() - коефіцієнт пропорційності між вхідною
і вихідною величинами АР, який ще
називають коефіцієнтом підсилення, або
коефіцієнтом передачі регулятора.
- коефіцієнт пропорційності між вхідною
і вихідною величинами АР, який ще
називають коефіцієнтом підсилення, або
коефіцієнтом передачі регулятора.
Статична
характеристика пропорційного регулятора
зображена на рис. 4. Як видно з рисунка,
крутизна (нахил) характеристики АР
суттєво залежить від значення коефіцієнта
передачі
.
Чим більше значення
![]() ,
тим сильніша дія регулятора на ВМ і РО
і тим швидше усувається відхилення
регульованої величини від заданого
значення
,
тим сильніша дія регулятора на ВМ і РО
і тим швидше усувається відхилення
регульованої величини від заданого
значення
![]() .
.
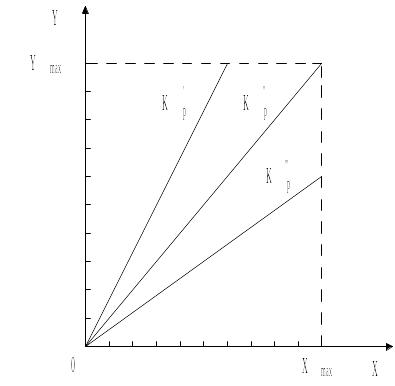
Рис. 4. Графіки статичної характеристики пропорційного регулятора
для
різних значень коефіцієнта передачі
![]() (
(![]() ).
).
У
технічному виконанні П-регулятор є
звичайним підсилювачем (електричним,
пневматичним чи гідравлічним), робота
якого характеризується показником,
яким служить коефіцієнт передачі
.
Коефіцієнт
у таких регуляторах є їх параметром
настроювання.
Однак вибір значення параметра
в процесі настроювання суттєво залежить
від конструкції ВМ і РО, від діапазону
„шкали” їх переміщення з одного
крайнього положення в інше. Для врахування
цього прийнята інша величина
![]() ,
яка є оберненою величині
,
яка є оберненою величині
![]() і яку виражають у відсотках
і яку виражають у відсотках
![]() .
.
Величину
![]() називають границею
пропорційності регулятора.
Іноді цю величину ще називають діапазоном
пропорційності,
або
діапазоном дроселювання,
або зоною
регулювання.
називають границею
пропорційності регулятора.
Іноді цю величину ще називають діапазоном
пропорційності,
або
діапазоном дроселювання,
або зоною
регулювання.
Величина
характеризує, якому відхиленню
регульованої величини (у відсотках від
максимально можливого її значення для
даної САР) для всіх можливих станів
рівноваги САР відповідає переміщення
РО з одного крайнього положення в інше.
Із означення величини
випливає, що якщо
![]() ,
то П-регулятор своєю вихідною величиною
для всіх можливих станів рівноваги САР
точно перекриває всю „шкалу” РО. Якщо
ж
,
то П-регулятор своєю вихідною величиною
для всіх можливих станів рівноваги САР
точно перекриває всю „шкалу” РО. Якщо
ж
![]() ,
то П-регулятор перекриває повністю
„шкалу” РО лише для значень
,
то П-регулятор перекриває повністю
„шкалу” РО лише для значень
![]() ,
які знаходяться у діапазоні, меншому
від
,
які знаходяться у діапазоні, меншому
від
![]() .
І нарешті, якщо
.
І нарешті, якщо
![]() ,
то П-регулятор не перекриває всієї
„шкали” РО.
,
то П-регулятор не перекриває всієї
„шкали” РО.
Отже, границею пропорційності можна назвати інтервал „шкали” регулятора, виражений у відсотках від її довжини, у діапазоні якого для всіх можливих станів рівноваги САР РО переміщується з одного крайнього положення в інше.
Роботу
П-регулятора розглянемо на прикладі
САР тиску (див. рис. 3). Тут роль П-регулятора
виконує мембранно-пружинний механізм,
який утворюють мембрана 5 і пружина 4.
Він сприймає значення регульованого
тиску Р в ресивері 1, порівнює його із
заданим значенням
![]() і залежно від відхилення
і залежно від відхилення
![]() переміщує затвор 2 відносно сідла 3
клапана 11 (змінює ступінь відкриття РО)
і, відповідно, змінює подачу газу в
ресивер таким чином, щоб відновити в
ньому задане значення тиску. Цей регулятор
відноситься до АР прямої дії, оскільки
для вироблення регулюючої дії і
переміщення РО він не потребує допоміжного
джерела енергії, а використовує для
цього потенціальну енергію стиснутого
регульованого газового потоку. Вхідною
величиною даного АР є відхилення
регульованого тиску
в ресивері від його заданого значення
переміщує затвор 2 відносно сідла 3
клапана 11 (змінює ступінь відкриття РО)
і, відповідно, змінює подачу газу в
ресивер таким чином, щоб відновити в
ньому задане значення тиску. Цей регулятор
відноситься до АР прямої дії, оскільки
для вироблення регулюючої дії і
переміщення РО він не потребує допоміжного
джерела енергії, а використовує для
цього потенціальну енергію стиснутого
регульованого газового потоку. Вхідною
величиною даного АР є відхилення
регульованого тиску
в ресивері від його заданого значення
![]() ,
тобто
.
Вихідною величиною регулятора є викликане
відхиленням регульованого тиску
переміщення
,
тобто
.
Вихідною величиною регулятора є викликане
відхиленням регульованого тиску
переміщення
![]() мембрани 5, а відповідно і штока 10 із
затвором 2, від початкового положення
мембрани 5, а відповідно і штока 10 із
затвором 2, від початкового положення
![]() ,
яке відповідає заданому значенню тиску
,
тобто
,
яке відповідає заданому значенню тиску
,
тобто
![]() .
.
Допустимо, що навантаження ресивера змінилося в сторону зменшення, і тиск в ньому збільшився на величину . Мембрана 4 під дією збільшеного тиску опуститься вниз на величину , яка залежить від протидіючого зусилля зі сторони пружини 5. При цьому затвор 2 зменшує подачу газу в ресивер і тиск в ньому зменшиться.
Динаміка розглядуваного регулятора, тобто його робота в перехідному режимі, описується таким диференціальним рівнянням другого порядку:
![]() ,
,
де,
крім відомих,
![]() - маса рухомих частин АР;
- маса рухомих частин АР;
![]() - коефіцієнт опору переміщенню рухомих
частин АР;
- коефіцієнт опору переміщенню рухомих
частин АР;
![]() - коефіцієнт жорсткості пружини;
- коефіцієнт жорсткості пружини;
![]() - площа мембрани;
- площа мембрани;
![]() - час.
- час.
В
статиці, тобто в усталеному режимі, під
час якого прискорення і швидкість
переміщення рухомих частин АР рівні
нулю (відповідно
![]() і
і
![]() ),
робота даного регулятора описується
такою залежністю:
),
робота даного регулятора описується
такою залежністю:
![]() ,
,
звідки отримуємо рівняння зв’язку між вихідною і вхідною величинами АР
![]() (2)
(2)
Співставляючи рівняння (2) і (1), отримуємо вираз для визначення коефіцієнта передачі, або коефіцієнта підсилення регулятора тиску прямої дії
![]() (3)
(3)
Із
(3) видно, що для конкретного АР з фіксованим
значенням площі мембрани
значення
![]() (параметра настроювання АР) визначається
значенням коефіцієнта жорсткості
пружини
(параметра настроювання АР) визначається
значенням коефіцієнта жорсткості
пружини
![]() .
Отже, маючи набір пружин з різними
значеннями
,
можна встановлювати те чи інше потрібне
значення коефіцієнта
розглядуваного АР. А встановлюючи
величину попереднього стиснення пружини,
настроюють АР на те чи інше задане
значення
регульованого тиску.
.
Отже, маючи набір пружин з різними
значеннями
,
можна встановлювати те чи інше потрібне
значення коефіцієнта
розглядуваного АР. А встановлюючи
величину попереднього стиснення пружини,
настроюють АР на те чи інше задане
значення
регульованого тиску.
Вище
було сказано, що при настроюванні
П-регулятора використовують величину
обернену до
,
тобто інший параметр настроювання АР,
яким є границі пропорційності
![]() .
Для зображення статичної характеристики
АР через
представимо його вхідну і вихідну
величини в безрозмірній формі
.
Для зображення статичної характеристики
АР через
представимо його вхідну і вихідну
величини в безрозмірній формі
![]() і
і
![]()
або у відсотках
![]() і
і
![]() ,
,
де
![]() і
і
![]() - відповідно вхідна і вихідна величини
регулятора у безрозмірній формі або у
відсотках;
- відповідно вхідна і вихідна величини
регулятора у безрозмірній формі або у
відсотках;
![]() - максимально можливе значення відхилення
регульованого тиску;
- максимально можливе значення відхилення
регульованого тиску;
![]() - максимально можливе значення переміщення
мембрани 5 і відповідно штока 10 із
затвором 2.
- максимально можливе значення переміщення
мембрани 5 і відповідно штока 10 із
затвором 2.
На
рис. 5 зображені графіки статичної
характеристики вище описаного П-регулятора
для різних значень границь пропорційності.
При зображенні статичної характеристики
прийнято, що при
шток 10 (див. рис. 3) повністю опущений
вниз і
![]() ,
тобто регулюючий клапан 11 повністю
закритий. Цим і визначається нахил
характеристик. Також прийнято, що для
заданого значення
регульованого тиску величина
,
тобто регулюючий клапан 11 повністю
закритий. Цим і визначається нахил
характеристик. Також прийнято, що для
заданого значення
регульованого тиску величина
![]() і їй повинно відповідати середнє
положення штока 10 (
і їй повинно відповідати середнє
положення штока 10 (![]() ).
).
Як
видно з рис. 5, при різних значеннях
границь пропорційності
використання шкал вхідної
і вихідної
величин буде неоднаковим. Так, при
![]() (
(![]() )
вказані шкали використовуються повністю.
При
)
вказані шкали використовуються повністю.
При
![]() (
(![]() )
переміщення штока 10 із одного крайнього
положення в інше (
)
переміщення штока 10 із одного крайнього
положення в інше (![]() )
відбувається при відхиленні вхідної
величини лише на 40 %. При
)
відбувається при відхиленні вхідної
величини лише на 40 %. При
![]() (
(![]() )
для відхилення вхідної величини на 100
% шкала переміщення (
)
для відхилення вхідної величини на 100
% шкала переміщення (![]() )
штока 10 буде використана лише на 62,5 %.
)
штока 10 буде використана лише на 62,5 %.
Є
два крайніх випадки розміщення статичної
характеристики регулятора. Перший, коли
![]() (
(![]() ),
тоді при найменшому відхиленні
від середнього значення (
)
величина
миттєво набуває максимальне (
),
тоді при найменшому відхиленні
від середнього значення (
)
величина
миттєво набуває максимальне (![]() )
або мінімальне (
)
або мінімальне (![]() )
значення. Характер роботи регулятора
у цьому випадку відповідає роботі
позиційного регулятора. Другий крайній
випадок розміщення статичної характеристики
регулятора, коли
)
значення. Характер роботи регулятора
у цьому випадку відповідає роботі
позиційного регулятора. Другий крайній
випадок розміщення статичної характеристики
регулятора, коли
![]() (
(![]() ).
У цьому випадку регулятор, очевидно, не
буде реагувати на зміну вхідної величини
.
).
У цьому випадку регулятор, очевидно, не
буде реагувати на зміну вхідної величини
.
Зображені на рис. 5 графіки статичної характеристики стосуються ідеальних пропорційних регуляторів, тобто регуляторів без нечутливості.
Реальні
регулятори під час роботи характеризуються
наявністю в них нечутливості
![]() .
Статична характеристика пропорційних
регуляторів із зоною нечутливості
.
Статична характеристика пропорційних
регуляторів із зоною нечутливості
![]() зображена на рис. 6. На цьому ж рисунку
показано як визначати основні технічні
параметри, що характеризують властивості
реальних регуляторів.
зображена на рис. 6. На цьому ж рисунку
показано як визначати основні технічні
параметри, що характеризують властивості
реальних регуляторів.
Допустимо, що значення регульованого тиску (див. рис. 3) відповідає заданому значенню. При цьому пружинно-мембранний механізм разом із штоком 10 буде знаходитися в якомусь фіксованому рівноважному положенні. Якщо значення тиску зросте внаслідок зменшення (навантаження ОР), то мембрана 5 завдяки збільшенню зусилля тиску почне стискувати пружину 4 і шток 10 буде рухатися вниз, регулюючий орган (затвор 2 клапана 11) прикриє подачу повітря, і тиск в ресивері почне зменшуватися до тих пір, поки пружинно-мембранний механізм знову не встановиться в рівноважному положенні. При цьому нове рівноважне положення не буде співпадати з тим, при якому тиск відповідав заданому. Оскільки, як видно з формули (1), кожному положенню регулюючого органу в стані рівноваги П-регулятора відповідає своє значення регульованого тиску , то нове усталене значення тиску буде відрізнятися від заданого значення, тобто виникає так звана статична похибка регулювання, або, як її називають по-іншому, залишкове відхилення.
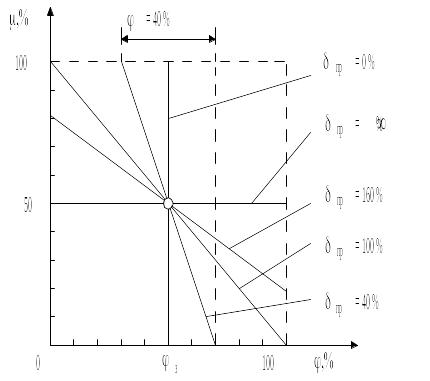
Рис. 5. Графіки статичної характеристики ідеального П-регулятора
для різних значень границь пропорційності.
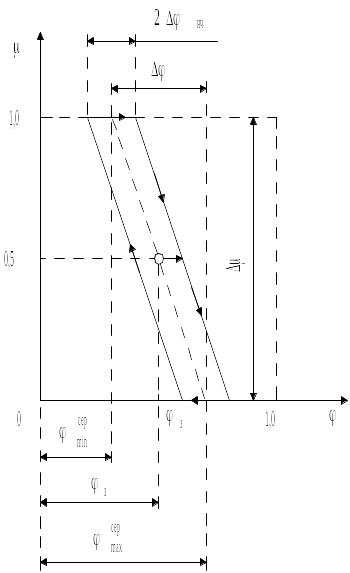
Рис. 6. Статична характеристика реального пропорційного регулятор.
Пропорційні регулятори відносяться до класу статичних ланок, для яких характерною є наявність похибки на виході, яка визначається згідно з формулою
![]() .
.
Статична похибка регулювання у П-регуляторі спричинена наявністю жорсткого від’ємного зворотного зв’язку, створюваного, як було сказано вище, пружиною 4, зусилля якої (пропорційне ступеню відкриття РО) діє на вхід регулятора і забезпечує однозначну залежність між вихідною і вхідною величинами регулятора в стані рівноваги САР.
П-регулятори широко застосовують у тих випадках, коли потрібно швидко усувати вплив виникаючих збурень на регульовану величину і коли допустима (з точки зору вимог технологічного процесу до точності забезпечення заданого значення регульованої величини) наявність статичної похибки регулювання. Зокрема П-регулятори застосовують у САР тиску і температури газів та рідин, а також у САР рівня рідин в різних резервуарах і ємкостях тощо.