

7. Дискретные линейные системы с постоянными параметрами. Уравнение циклической свертки.
Теория дискретных линейных систем связана с описанием и обработкой временных или частотных последовательностей и проектированием систем цифровой обработки сигналов, например фильтров
Линейные системы с постоянными параметрами
Линейная система - это система, к которой применим принцип суперпозиции и определяется она следующим образом. Если X1(n) и X2(n) - некоторые входные последовательности, а Y1(n) и Y2(n) - соответствующие им выходы линейной системы, то при подаче на вход последовательности aX1(n) + bX2(n) на выходе образуется последовательность aY1(n) + bY2(n), где а и b - произвольные постоянные.
Система с постоянными параметрами характеризуется тем, что если входной последовательности X(n) соответствует выход Y(n), то входной последовательности X(n-n0) при любых n0 соответствует на выходе Y(n-n0). Это свойство называется инвариантностью во времени.
Дискретная система по существу задает алгоритм преобразования одной последовательности (входной X(n)) в другую (выходную Y(n)).
Циклические и линейные свертки
Прямые способы вычисления произведения многочленов содержат число умножений и сложений, примерно равное произведению степеней многочленов, LN; возможны, однако, другие способы вычисления такого произведения, содержащие меньшее число вычислений.
Циклическая свертка, s M = 8 (х) d (x) (mod хп — 1), рициенты даются п —
где deg g (х) = deg d (x) = п — 1, коэфствами si = Е ?(«-*> A. i = 0,6=0
и двойные скобки обозначают вычисления по модулю л, если вычислять ее прямо по выписанным формулам, содержит п2 умножений и я (п — 1) сложений. Циклическую свертку можно также вычислять как линейную свертку с последующим приведением
по модулю хп— Iх). Следовательно, эффективные способы вычисления линейной свертки приводят также к эффективным методам вычисления циклической свертки. Наоборот, эффективные методы вычисления циклической свертки можно легко превратить
в эффективные методы вычисления линейной свертки. Популярным способом вычисления циклической свертки является использование теоремы о свертке и дискретного преобразования Фурье. Согласно теореме о свертке в частотной области, Sh = GhDk, k = 0, ..., п— 1, так что свертку можно вычислять, выполняя последовательно преобразование Фурье, поточечное умножение и обратное преобразование Фурье
8. Уравнение апериодической свертки. Графическое представление вычисления свертки. Пример.
А периодическая
свертка (линейная) относятся к классу
локальных преобразований. При этом как
правило полагается, что размер вектора
исходных данных значительно больше
размера ядра свертки, что приводит к
следующему выражению для вычисления
любого отсчета результата:
периодическая
свертка (линейная) относятся к классу
локальных преобразований. При этом как
правило полагается, что размер вектора
исходных данных значительно больше
размера ядра свертки, что приводит к
следующему выражению для вычисления
любого отсчета результата:
Вычисление
свертки лежит в основе корреляционного
метода подавления помех. Сущность такого
метода заключается в использовании
различия между корреляционными функциями
сигнала и помехи. Данный метод эффективен
лишь в случае обработки периодических
или квазипериодических сигналов.
Рассмотрим сущность метода на примере,
когда полезный сигнал является
гармоническим, а помеха - типа белого
гауссова шума [21]. Автокорреляционная
функция сигнала является тоже гармонической
и имеет ту же частоту. Метод
автокорреляционного приема основан на
анализе автокорреляционной функции
принятого сигнала y(t)=x(t)+р(t).
Если сигнал и помеха взаимно независимы
(типичный для практики случай), то
![]() т.е автокорреляционная функция принятого
сигнала равна сумме автокорреляционных
функций сигнала и помехи. Метод
корреляционного приема позволяет
обнаружить полезный сигнал, который
имеет мощность значительно меньшую,
чем мощность помехи.
т.е автокорреляционная функция принятого
сигнала равна сумме автокорреляционных
функций сигнала и помехи. Метод
корреляционного приема позволяет
обнаружить полезный сигнал, который
имеет мощность значительно меньшую,
чем мощность помехи.
Пусть
имеется два дискретных сигнала
a(n),n=0..N-1,
и
b(n),
n=0..M-1.
В общем случае длины этих сигналов N и
M могут
отличаться. Линейной сверткой сигналов
a(n) и
b(n) называется
дискретный сигнал вида:
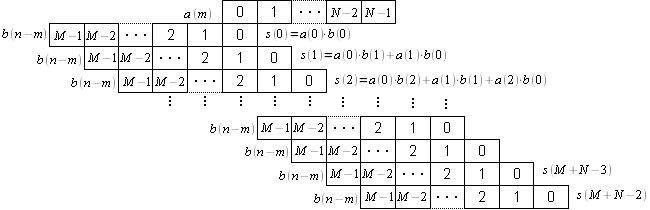
![]() Для вычисления линейной свертки сигналы
a(n)
и
b(n) сдвигают
относительно друг друга почленно
перемножают и складывают. При этом
предполагается, что a(n)=0 при
n<0 и
n>N ,
а также b(n)=0 при
n<0 и
n>M. Графическое
представление:
Для вычисления линейной свертки сигналы
a(n)
и
b(n) сдвигают
относительно друг друга почленно
перемножают и складывают. При этом
предполагается, что a(n)=0 при
n<0 и
n>N ,
а также b(n)=0 при
n<0 и
n>M. Графическое
представление:
Отсчеты сигнала b(n) сдвигаются относительно отсчетов последовательности a(n) все возможные перекрывающиеся отсчеты почленно перемножаются и складываются. Приведен пример вычисления линейной свертки двух сигналов a(n)=[2,1,3,-1] длиной 4 отсчета и b(n)=[-1,1,2] длиной 3 отсчета.
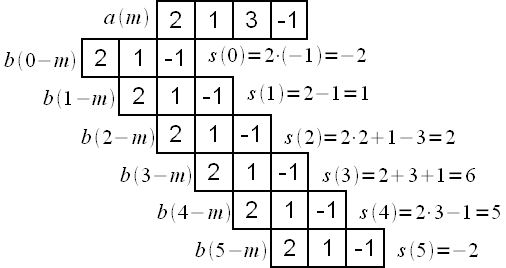
Необходимо отметить, что сигнал b(n) при вычислении свертки отражается слева-направо, поскольку b(0)= -1 самый первый отсчет (самый ранний по времени) и обрабатываться он также должен первым.