

1.Основные законы электромеханики и индуктивных электрических машин.
2. Классификация электрических машин.
3. Машины переменного тока. Асинхронные машины. Принцип действия и элементы конструкции.
4. Методы создания вращающегося магнитного поля. Создание вращающегося магнитного поля с помощью симметричной многофазной обмотки, частота вращения магнитного поля.
5. Режимы работы асинхронных машин. Скольжение. Пределы его изменения.
7. Основные уравнения асинхронных машин. Приведение уравнения ЭДС фазы вращающегося ротора уравнению неподвижного.
8. Уравнения приведенной асинхронной машины (пояснить входящие величины). Схема замещения асинхронной машины.
9. Схема замещения и векторная диаграмма асинхронного двигателя. Значения входящих величин в относительных единицах.
10. Механические характеристики асинхронных машин. Влияние активного сопротивления на пусковой и номинальный моменты.
11. Механическая характеристика асинхронных двигателей. Влияние на механическую характеристику параметров сети и двигателя. Рабочие характеристики.
12. Способы пуска асинхронных двигателей.
13. Регулирование частоты вращения асинхронных двигателей.
14. Исполнительные асинхронные двигатели. Характеристики двигателей с амплитудным управлением.
15. Исполнительные асинхронные двигатели. Характеристики двигателей с фазовым управлением.
16. Машины переменного тока. Синхронные машины. Принцип действия и элементы конструкции. Режим холостого хода.
17. Влияние МДС (реакции) якоря на суммарный магнитный поток синхронного генератора.
18. Основные уравнения и векторные диаграммы явнополюсного и неявнополюсного синхронного генератора.
19. Основные характеристики синхронных генераторов при автономной работе.
20. Параллельная работа синхронных машин. Синхронные режимы работы синхронных машин.
21. Угловые характеристики активной мощности синхронных машин.
22. Угловые характеристики реактивной мощности синхронных машин.
23. Машины постоянного тока. Принцип действия и элементы конструкции. Роль коллектора в генераторах и двигателях постоянного тока.
24)Работа электрической машины постоянного тока в режиме двигателя. Основные уравнения
25)Механические характеристики электродвигателей постоянного тока
27. Исполнительные двигатели постоянного тока. Хар-ки двигателей с якорным управлением.
Исполнительный двигатель постоянного тока служит для преобразования электрического сигнала в механический поворот вала.
Исполнительные двигатели почти не работают в номинальном режиме. Для них характерно постоянное изменение скорости, частые пуски, реверсы и остановки. Под номинальной мощностью исполнительного двигателя понимают максимальную мощность, на которую рассчитан двигатель.
К исполнительным двигателям предъявляются следующие основные требования: устойчивость работы, линейность регулировочных и механических характеристик, малая мощность регулирования, большой пусковой момент, отсутствие самохода (двигатели должны сразу тормозиться после снятия сигнала), изменение в широких пределах скорости вращения, быстродействие, надежность, малый вес и габариты.
Недостатки исполнительных двигателей постоянного тока связаны с применением коллектора и наличием скользящего контакта.
Исполнительные двигатели конструктивно выполняются так же, как и другие микромашины постоянного тока, за исключением того, что их магнитную систему полностью набирают из изолированных листов электротехнической стали. Одну из обмоток двигателя — полюсную или якорную — присоединяют к напряжению сети, которое сохраняется постоянным независимо от вращения якоря. В системах автоматического регулирования обмотку, подключенную на постоянное напряжение сети, называют обмоткой возбуждения. Вторая обмотка, на которую подается сигнал, называется обмоткой управления. Обмоткой управления может быть обмотка полюсов или якорная, в первом случае имеют двигатель с полюсным, во втором — с якорным управлением. В большинстве случаев применяется якорное управление. Двигатели с якорным управлением могут быть выполнены с возбуждением от постоянных магнитов.
Особенностью данной конструкции является увеличенный воздушный зазор, наличие двух обмоток: полюсной и обмотки полого якоря. Якорь без сердечника, на роторе есть только обмотка.
Различают два способа управления исполнительными двигателями: якорный и полюсной. В первом случае обмотка полюсов присоединена дополнительно к сети с напряжением UВ и является обмоткой возбуждения. Во втором случае обмоткой возбуждения служит обмотка якоря, длительно присоединенная к сети напряжением возбуждения UВ. Ток якоря является здесь током возбуждения IВ. Схемы управления исполнительными двигателями представлены на рисунке 2.
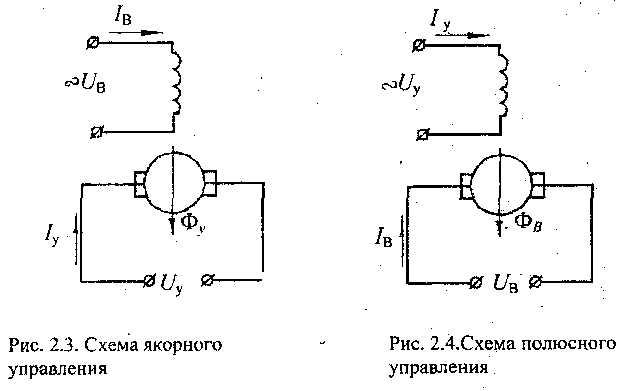
Рисунок 2
Механической характеристикой исполнительного двигателя называется зависимость момента на валу двигателя М от скорости вращения якоря n при нормальном напряжении возбуждения и заданном коэффициенте α:
α=UУ/UВ;
Управления механической характеристики можно получить из формул для скорости и момента:
 (1)
(1)
где U – напряжение на якоре, В
I – ток якорной цепи, А
R – сопротивление якорной цепи, Ом
Се, СМ – коэффициенты приведения,
N – число активных проводников якоря,
α и ρ – число соответственно пар параллельных ветвей и полюсов.
Механические характеристики для якорного и полюсного управления представлены на рисунке 3.
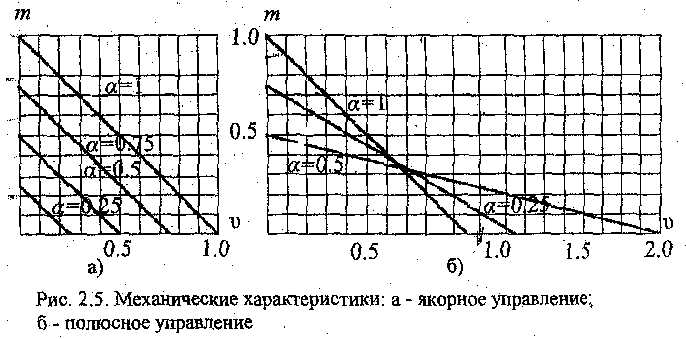
Рисунок 3
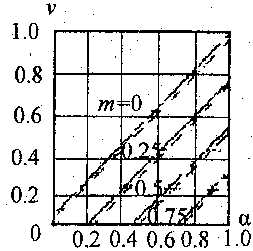
Регулировочной характеристикой управляемого двигателя называется зависимость скорости вращения якоря n от напряжения управления Uу при заданных напряжениях возбуждения и момента нагрузки МС. Уравнения для якорного управления:
v = a - m
Регулировочные характеристики для идеального двигателя при якорном управлении – линейны. Начальные точки кривых на рисунке 4 лежащие на оси абсцисс, показывают чувствительность двигателя.
Мощность для якорного управления выражаются формулами:
 Мощность
управления обычно ограничивается
мощностью усилителя.
Мощность
управления обычно ограничивается
мощностью усилителя.
28. Исполнительные двигатели постоянного тока. Хар-ки двигателей с полюсным управ.
Исполнительный двигатель постоянного тока служит для преобразования электрического сигнала в механический поворот вала.
Исполнительные двигатели почти не работают в номинальном режиме. Для них характерно постоянное изменение скорости, частые пуски, реверсы и остановки. Под номинальной мощностью исполнительного двигателя понимают максимальную мощность, на которую рассчитан двигатель.
К исполнительным двигателям предъявляются следующие основные требования: устойчивость работы, линейность регулировочных и механических характеристик, малая мощность регулирования, большой пусковой момент, отсутствие самохода (двигатели должны сразу тормозиться после снятия сигнала), изменение в широких пределах скорости вращения, быстродействие, надежность, малый вес и габариты.
Недостатки исполнительных двигателей постоянного тока связаны с применением коллектора и наличием скользящего контакта.
Исполнительные двигатели конструктивно выполняются так же, как и другие микромашины постоянного тока, за исключением того, что их магнитную систему полностью набирают из изолированных листов электротехнической стали. Одну из обмоток двигателя — полюсную или якорную — присоединяют к напряжению сети, которое сохраняется постоянным независимо от вращения якоря. В системах автоматического регулирования обмотку, подключенную на постоянное напряжение сети, называют обмоткой возбуждения. Вторая обмотка, на которую подается сигнал, называется обмоткой управления. Обмоткой управления может быть обмотка полюсов или якорная, в первом случае имеют двигатель с полюсным, во втором — с якорным управлением. В большинстве случаев применяется якорное управление. Двигатели с якорным управлением могут быть выполнены с возбуждением от постоянных магнитов.
Особенностью данной конструкции является увеличенный воздушный зазор, наличие двух обмоток: полюсной и обмотки полого якоря. Якорь без сердечника, на роторе есть только обмотка.
Различают два способа управления исполнительными двигателями: якорный и полюсной. В первом случае обмотка полюсов присоединена дополнительно к сети с напряжением UВ и является обмоткой возбуждения. Во втором случае обмоткой возбуждения служит обмотка якоря, длительно присоединенная к сети напряжением возбуждения UВ. Ток якоря является здесь током возбуждения IВ. Схемы управления исполнительными двигателями представлены на рисунке 2.
Рисунок 2
Механической характеристикой исполнительного двигателя называется зависимость момента на валу двигателя М от скорости вращения якоря n при нормальном напряжении возбуждения и заданном коэффициенте α:
α=UУ/UВ;
Управления механической характеристики можно получить из формул для скорости и момента:
(1)
где U – напряжение на якоре, В
I – ток якорной цепи, А
R – сопротивление якорной цепи, Ом
Се, СМ – коэффициенты приведения,
N – число активных проводников якоря,
α и ρ – число соответственно пар параллельных ветвей и полюсов.
Механические характеристики для якорного и полюсного управления представлены на рисунке 3.
Рисунок 3
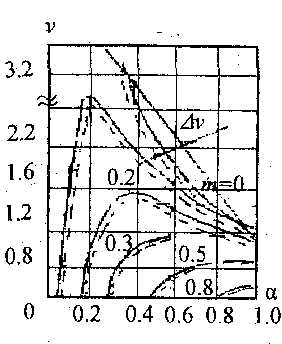
Регулировочной характеристикой управляемого двигателя называется зависимость скорости вращения якоря n от напряжения управления Uу при заданных напряжениях возбуждения и момента нагрузки МС. Уравнения для полюсного управления:
v = n/n0
При полюсном управлении они линейны лишь на начальном участке и при малых относительных моментах неоднозначны. Начальные точки кривых на рисунке 4 лежащие на оси абсцисс, показывают чувствительность двигателя.
Для полюсного управления:
 Мощность
управления обычно ограничивается
мощностью усилителя.
Мощность
управления обычно ограничивается
мощностью усилителя.