

5.4. Раздел Continuous (аналоговые блоки)
Раздел содержит блоки, непосредственно предназначенные для описания аналоговых (непрерывных) систем.
Раздел содержит 8 блоков (см. рис. 5.8 ).
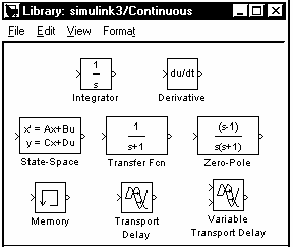
Рис. 5.8 - Блоки раздела Continuous
Перечислим блоки входящие в этот раздел:
1. Integrator - выполняет интегрирование входного сигнала.
2. Derivative - осуществляет дифференцирование входного сигнала.
3. State Space - блок создает динамический объект, описываемый уравнениями в пространстве состояний:
![]()
![]()
где x - вектор состояния, u – вектор входных воздействий, y - вектор выходных сигналов, A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно. (n - количество переменных состояния, m - число входных сигналов, r - число выходных сигналов).
4. Transfer Fcn - "передаточное звено".
5. Zero-pole - определяет передаточную функцию с заданными полюсами и нулями.
6. Memory - выполняет задержку входного сигнала на один временной такт.
7. Transport delay - задержка передачи.
8. Variable transport delay - изменяемая задержка передачи.
Рассмотрим несколько примеров использования блоков типа Continuous.
На рис. 5.9 показан пример работы интегратора при подаче на его вход ступенчатого сигнала. Начальное условие принято равным нулю.
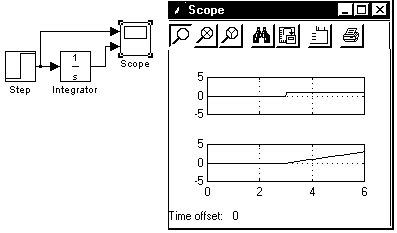
Рис. 5.9 - Иллюстрация работы блока Integrator
На рис. 5.10 показан пример работы Transfer Fcn при подаче на его вход ступенчатого сигнала. Параметры блока следующие:
1. Numerator - вектор или матрица коэффициентов полинома числителя.
2. Denominator -вектор коэффициентов полинома знаменателя.
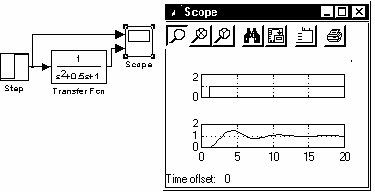
Рис. 5.10 - Пример использования блока Transfer Fcn
5.5. Раздел Discrete (дискретные блоки)
Раздел содержит блоки, непосредственно предназначенные для описания дискретных систем.
 Раздел
содержит 8 блоков (см. рис. 5.11)
Раздел
содержит 8 блоков (см. рис. 5.11)
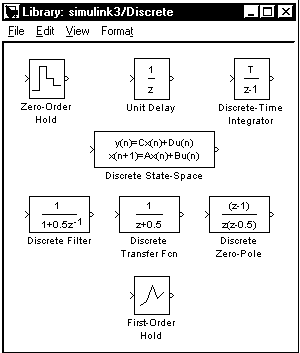
Рис. 5.11 - Блоки раздела Discrete
В этот раздел входят следующие блоки:
1. Zero-Order Hold - выполняет дискретизацию входного сигнала по времени.
2. Unit Delay - выполняет задержку входного сигнала на один шаг модельного времени.
3. Discrete-Time Integrator - блок используется для выполнения операции интегрирования в дискретных системах.
4. Discrete State-Space - блок создает динамический объект, описываемый уравнениями в пространстве состояний:
![]()
![]()
где x - вектор состояния, u - вектор входных воздействий, y - вектор выходных сигналов, A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно, n - номер шага моделирования.
5. Discrete Filter - блок дискретного фильтра задает дискретную передаточную функцию от обратного аргумента (1/z).
6. Discrete Transfer Fcn – передаточная функция для дискретных систем. Параметры блока следующие:
Numerator - вектор или матрица коэффициентов числителя;
Denominator - вектор коэффициентов знаменателя;
Sample time - шаг дискретизации по времени.
7. Discrete Zero-Pole - определяет передаточную функцию с заданными полюсами и нулями.
8. First-Order Hold - блок задает линейное изменение выходного сигнала на каждом такте дискретизации, в соответствии с крутизной входного сигнала на предыдущем интервале дискретизации.
Рассмотрим пример использования блоков этого раздела.
На рис. 5.12 приведены результаты моделирования для следующей дискретной системы (A=B=C=D=1)
![]()
![]()
где x и y скалярные переменные, u белый шум с ограниченной полосой. Начальные условия для переменной x нулевые.
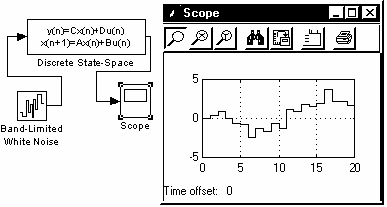
Рис. 5.12 - Пример использования блока Discrete State-Space