

Отчетные материалы
1. Расчет параметров двигателя.
2. Структурная схема динамической модели двигателя.
3. Графики переходных характеристик по управляющему воздействию и моменту сопротивления и их анализ.
4. Расчет относительной погрешности.
Контрольные вопросы
1. Принцип действия и назначение элементов цифро-аналогового следящего привода (рис. 1.1).
2. Уравнения электрического и механического равновесия двигателя.
3. Особенности выбора и расчета двигателей следящих электроприводов.
4. Основные формулы расчета параметров ССДМ двигателя.
5. Порядок моделирования ССДМ двигателя с применением Simulink.
6. Уравнение электрического равновесия двигателя постоянного тока с управлением по цепи якоря.
7. Уравнение движения электропривода с двигателем постоянного тока с управлением по цепи якоря.
8. Порядок построения структурной схемы двигателя постоянного тока с управлением по цепи якоря с применением Simulink.
9. Соотношение постоянных времени двигателя постоянного тока с управлением по цепи якоря, влияющего на качество переходных процессов.
10. Порядок моделирования ССДМ двигателя с применением Simulink и анализ полученных результатов.
2. ЛАБОРАТОРНАЯ РАБОТА № 2
ОПТИМИЗАЦИЯ КОНТУРА СКОРОСТИ
Цель работы
Формировать умения:
– формулировать цель проекта решения задачи по синтезу регулятора скорости для настройки контура скорости ЦАСУ на оптимум по модулю;
– использовать компьютерные технологии моделирования структурной схемы динамической модели контура скорости ЦАСУ и обрабатывать результаты моделирования по переходным и логарифмическим частотным характеристикам (ЛЧХ).
2.1. СТАНДАРТНЫЕ НАСТРОЙКИ И ИХ ПРИМЕНЕНИЕ
В
теории проектирования ЭП широкое
применение получили методы последовательной
коррекции под названием «стандартные
настройки» (СН) [1, 9]. Различают два вида
СН: настройка
на оптимум по модулю
(ОМ) и настройка
на симметричный оптимум (СО).
При такой коррекции решается задача
оптимального выбора параметров регулятора
с целью получения заранее известного
стандартного набора показателей качества
процесса управления: времени нарастания
![]() (первого
времени достижения установившегося
значения (ПВДУЗ)), перерегулирования
(первого
времени достижения установившегося
значения (ПВДУЗ)), перерегулирования
![]() ,
запаса устойчивости по фазе
,
запаса устойчивости по фазе
![]() и амплитуде Lз,
числа колебаний N.
и амплитуде Lз,
числа колебаний N.
2.1.1. Настройка на оптимум по модулю
Настройкой
контура на ОМ называется синтез регулятора
с целью получения динамических
характеристик замкнутого контура,
близких
к характеристикам колебательного
звена с относительным коэффициентом
затухания
![]() =
= ![]() = 0,707,
перерегулированием
= 4,3 %,
запасом устойчивости по фазе
= 0,707,
перерегулированием
= 4,3 %,
запасом устойчивости по фазе
![]() º,
временем нарастания
= 4,7ТΣ.
º,
временем нарастания
= 4,7ТΣ.
При
настройке контура на ОМ осуществляется
компенсация больших постоянных времени
силового канала ЭП и динамические
процессы будут определяться суммарными
малыми постоянными времени
![]() контура.
контура.
Любой контур считается настроенным на ОМ, если его передаточная функция в разомкнутом состоянии имеет вид:
![]() =
=
![]() ,
(2.1)
,
(2.1)
где
![]() =
.
=
.
Рассмотрим синтез регулятора применительно к неизменяемой части ЭП, которая описывается передаточной функцией:
![]() =
=
 ,
(2.2)
,
(2.2)
где Тi – компенсируемые большие постоянные времени контура.
При выполнении условия:
Т i >> , (2.3)
второй сомножитель (2.2) можно записать как:
![]() ,
(2.4)
,
(2.4)
тогда передаточная функция неизменяемой части ЭП:
=
![]()
 .
(2.5)
.
(2.5)
При последовательной коррекции передаточная функция регулятора:
![]() =
=
![]() .
(2.6)
.
(2.6)
После подстановки в (2.6) выражений (2.1) и (2.5) получим:
=
 ,
,
или
= ,
(2.7)
,
(2.7)
где
Кp
=
![]() ;
;![]() ;
Тp
– параметры регулятора.
;
Тp
– параметры регулятора.
В качестве примера настройки на ОМ, рассмотрим настройку контура скорости (КС). ССДМ КС изображена на рис. 2.1.
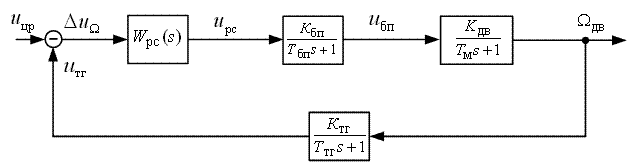
Рис. 2.1. Структурная схема динамической модели контура скорости
Передаточная функция неизменяемой части КС запишется в виде произведения передаточных функций блока питания, двигателя и тахогенератора:
=
![]() .
.
Электромеханическая постоянная времени двигателя Тм является постоянной времени, подлежащей компенсации.
Постоянные времени блока питания (БП) Тбп и тахогенератора (ТГ) Ттг являются малыми постоянными времени, и их влияние сказывается на высоких частотах, поэтому произведение инерционных звеньев с малыми постоянными времени можно заменить одним инерционным звеном:
![]() ,
(2.8)
,
(2.8)
где = Тбп + Ттг – суммарная малая постоянная времени КС.
С учетом приближения выражение (2.8) примет вид:
=
![]() .
(2.9)
.
(2.9)
С применением формулы (2.6) определяем передаточную функцию регулятора скорости (РС):
![]() ,
,
где передаточная функция настроенного на ОМ разомкнутого КС:
![]() .
(2.10)
.
(2.10)
Тогда
![]() =
=
![]() .
.
Переписывая передаточную функцию РС в стандартном виде, получим:
=
![]() ,
(2.11)
,
(2.11)
где
Трс
= Тм,
а Крс
=
![]() .
.
Полученная передаточная функция РС описывает динамические свойства ПИ-регулятора.
Согласно (2.10), передаточная функция замкнутого КС:
![]() =
=
![]() .
(2.12)
.
(2.12)
Перепишем (2.12) как:
=
![]() ,
,
где
Ткс
=
![]() – постоянная времени КС;
=
– постоянная времени КС;
=
![]() = 0,707.
= 0,707.
На
рис. 2.2, 2.3 показаны стандартные графики
ЛЧХ и переходной характеристики при
настройке на ОМ, полученные по выражениям
(2.10) и (2.12). По графикам определяем
показатели качества КС, настроенного
на
ОМ: запас устойчивости по фазе
![]() º,
перерегулирование
= 4,32 %
и время нарастания переходного процесса
tн
º,
перерегулирование
= 4,32 %
и время нарастания переходного процесса
tн
![]() = 0,47 с..
= 0,47 с..
Настройка на ОМ позволяет получить достаточное быстродействие при небольшом перерегулировании. В ряде случаев, когда требуется получить повышенное быстродействие и точность системы, применяют настройку на СО.
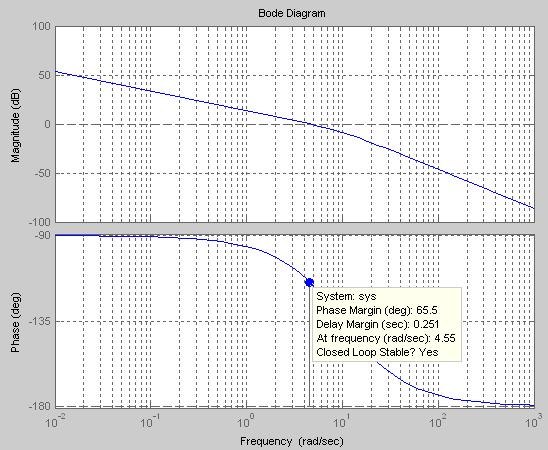
Рис. 2.2. Стандартный график ЛЧХ при настройке на оптимум по модулю
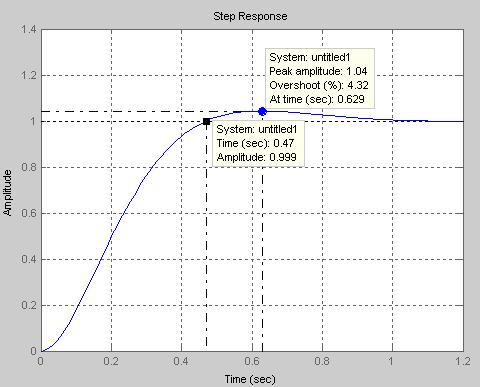
Рис. 2.3. Переходная
характеристика
![]() при настройке
при настройке
на оптимум по модулю