

2.3. Корекція похибок звт з допомогою кодокерованих мір
Значення
похибки
![]() в загальному випадку залежить від
значення
в загальному випадку залежить від
значення
![]() вхідного інформативного сигналу і для
її аналізу зручно використовувати
багаточленну модель [1-3,
26].
вхідного інформативного сигналу і для
її аналізу зручно використовувати
багаточленну модель [1-3,
26].
 , (2.6)
, (2.6)
де
![]() ,
,
![]() ,
,
![]() – відповідно адитивна, мультиплікативна
та нелінійна складові похибки;
– відповідно адитивна, мультиплікативна
та нелінійна складові похибки;
![]() - систематична та центрована
- систематична та центрована
![]() складові похибки.
складові похибки.
Коефіцієнти
![]() ,
,
![]() ,
,
![]() ,
... є випадковими величинами або процесами,
залежать від векторів
параметрів вимірювального кола та
,
... є випадковими величинами або процесами,
залежать від векторів
параметрів вимірювального кола та
![]() факторів похибок, але не залежать від
інформативного параметра X.
Систематичні
складові похибки завжди спотворюють
результат вимірювання, а тому їх виявлення
з метою врахування або ж корекції є
одним із центральних питань метрології.
На жаль, не існує універсального методу
корекції систематичних похибок, оскільки
дуже різноманітні методи, засоби і умови
вимірювань [26, 26-33]. Систематичні похибки
вважаються виключеними, якщо вони або
сума їх не виключених залишків не
перевищують половини одиниці десяткового
розряду, в якому стоїть остання значуща
цифра допустимої похибки
факторів похибок, але не залежать від
інформативного параметра X.
Систематичні
складові похибки завжди спотворюють
результат вимірювання, а тому їх виявлення
з метою врахування або ж корекції є
одним із центральних питань метрології.
На жаль, не існує універсального методу
корекції систематичних похибок, оскільки
дуже різноманітні методи, засоби і умови
вимірювань [26, 26-33]. Систематичні похибки
вважаються виключеними, якщо вони або
сума їх не виключених залишків не
перевищують половини одиниці десяткового
розряду, в якому стоїть остання значуща
цифра допустимої похибки
![]() результату вимірювання
[3, 26].
Прогнозування часових змін похибок
вимагає проведення цілого великого
комплексу експериментальних досліджень
в робочих умовах для засобів вимірювання
певного типу [1,
3, 13].
результату вимірювання
[3, 26].
Прогнозування часових змін похибок
вимагає проведення цілого великого
комплексу експериментальних досліджень
в робочих умовах для засобів вимірювання
певного типу [1,
3, 13].
Оскільки
з
використанням сучасних мікроелектронних
та інформаційних
технологій принципово
можуть
бути реалізовані
малогабаритні кодокеровані
міри,
то для вимірювання
електричних величин
доцільно
використовувати диференційний або
компенсаційний методи [34].
При використанні
диференційного
методу у першому
циклі
отримується
код Nx1
результату перетворення
електричної величини
Х
за умови
автоматичного коригування
АСП
![]() і для значення
еталонного сигналу
рівного
нулю
і для значення
еталонного сигналу
рівного
нулю
де
![]() - зведені
до входу ЗВТ АСП, відповідно
ЗВТ та кодокерованої
міри; Δк
– нескориговане
значення
АСП.
- зведені
до входу ЗВТ АСП, відповідно
ЗВТ та кодокерованої
міри; Δк
– нескориговане
значення
АСП.
З допомогою коду Nx1 на виході кодокерованої міри формується електрична величина Хе1
де ХЕ – значення сигналу еталонної вхідної електричної величини кодокерованої міри; Nxm – максимальне значення коду керування міри; δμ – відносна похибка кодокерованої міри електричного сигналу.
У другому циклі перетворення з автоматичною корекцією АСП знаходять значення коду Nx2 результату
 .
(2.9)
.
(2.9)
Результат
вимірювання Nx
можна знайти як суму кодів Nx1,
Nx2.
Знехтувавши
складовими третього
і вищих
порядків малості
та враховуючи
очевидну умову
![]() отримаємо
отримаємо
Аналіз
формули (2.10) показує, що при малих
значеннях МСП вже при реальних для
сучасних промислових приладів
співвідношеннях
![]() вплив членів другого порядку малості
буде нехтовно малим, тобто більше, ніж
у 5 разів буде меншим від значення
лінійних членів
вплив членів другого порядку малості
буде нехтовно малим, тобто більше, ніж
у 5 разів буде меншим від значення
лінійних членів
Отже, у випадку використання диференційного методу побудови ЗВТ похибка результату вимірювання електричних величин практично визначатиметься тільки похибкою δμ кодокерованої міри. Це дає теоретичні підстави для розроблення нового покоління ЗВТ електричних величин, в яких можна практично забезпечити оперативний контроль процесів вимірювань. Роль „чорної скриньки” у цьому випадку виконуватимуть кодокеровані міри електричних величин. Для забезпечення практичного використання цього способу оперативного контролю доцільно реалізовувати кодокеровані міри малогабаритними та переносними з використанням сучасних досягнень мікроелектронних та інформаційних технологій. При виникненні сумнівів в правдивості результатів вимірювань, отриманих з даного ЗВТ, його вмонтовану „чорну скриньку” слід демонтувати з приладу та відправити на метрологічну перевірку, а на її місце підключити перевірену „чорну скриньку”. Таким чином, процедура оперативного контролю здійснюватиметься практично безперервно, за винятком проміжків часу, потрібних для заміни „чорної скриньки”. Якщо і після заміни „чорної скриньки” із ЗВТ отримуються сумнівні результати, то слід детальніше проаналізувати реальні умови експлуатації щодо виявлення невраховуваних факторів похибок або ж, у разі отримання негативного результату, демонтувати ЗВТ і відправити його на метрологічну перевірку. За умови здійснення автоматичної корекції АСП вхідного вимірювального кола перехідні опори та залишкові контактні е.р.с. комутаційних елементів (роз`ємів) „чорних скриньок” не впливатимуть на результат вимірювання.
Для
здійснення оперативного контролю за
протіканням вимірювальних процесів
ЗВТ, що вже експлуатуються, доцільно
використовувати переносні кодокеровані
міри (калібратори) електричних величин
[35-38]. Вище було зазначено, що для
забезпечення високої достовірності
контролю межа допустимих значень похибки
кодокерованих мір повинна бути більше,
ніж у 5 разів меншою від межі допустимих
значень похибки контрольованих ЗВТ. В
робочих умовах експлуатації в серійних
калібраторах електричних величин
виникає необхідність в періодичній
ручній корекції АСП, що збільшує
трудоємність метрологічних робіт,
збільшує час їх проведення, що, у деяких
випадках, практично неприйнятно через
дуже обмежений час знаходження оператора
на технологічних об`єктах, наприклад,
атомні електростанції [36, 38]. Тому,
калібратори електричних величин доцільно
забезпечувати системою автоматичної
корекції АСП або ж можна використовувати
метод подвійної інверсії сигналів, як
це подано на рис. 2.1. для калібраторів
напруги. Цей метод може використовуватись
для автоматичної корекції АСП (детальніший
розгляд о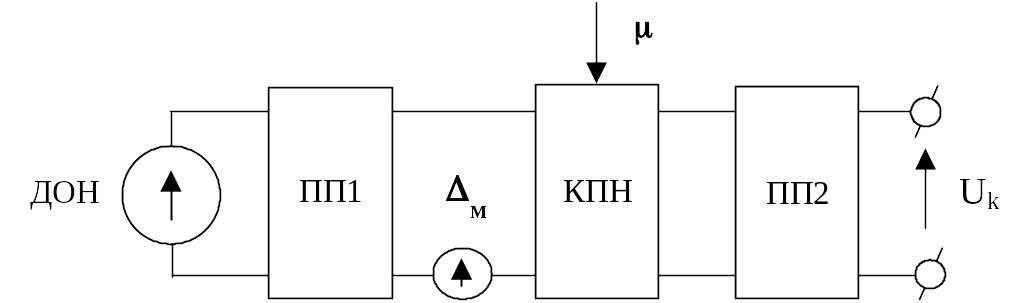 собливостей
реалізації є в наступних розділах).
собливостей
реалізації є в наступних розділах).
ДОН – джерело опорної напруги; ПП1,2 – перемикачі полярності; КПН – кодокерований подільник напруги
Рис. 2.1. - Структура калібратора напруги з корекцією адитивної складової похибки методом подвійної інверсії
основі
схемотехнічних рішень вже існуючих
кодокерованих мір. Коригування АСП
кодокерованих мір здійснюється шляхом
знаходження з допомогою ЗВТ середнього
арифметичного двох його показів при
однойменних положеннях перемикачів
полярності ПП1 та ПП2 калібратора напруги
[38].
Дійсно, при подвійній інверсії вхідного
для керованого подільника КПН сигналу
Е0
та вихідного сигналу UК
калібратора, в одному із однойменних
положень перемикачів ПП1 та ПП2 вихідна
напруга буде рівна
![]() ,
а в їх протилежному положенні -
,
а в їх протилежному положенні -
![]() .
В багатьох практичних випадках межі
допустимих значень похибки ЗВТ
.
В багатьох практичних випадках межі
допустимих значень похибки ЗВТ
![]() та кодокерованих мір
та кодокерованих мір
![]() нормуються двочленною моделлю. Тоді,
за умов, що за час проведення вимірювань
і робочі умови експлуатації, і похибки
ЗВТ та калібратора залишаються незмінними,
для визначення похибки ЗВТ необхідно
провести всього чотири вимірювання при
двох значеннях вихідного сигналу
калібратора UК1
і UК2
та опрацювати їх результати
нормуються двочленною моделлю. Тоді,
за умов, що за час проведення вимірювань
і робочі умови експлуатації, і похибки
ЗВТ та калібратора залишаються незмінними,
для визначення похибки ЗВТ необхідно
провести всього чотири вимірювання при
двох значеннях вихідного сигналу
калібратора UК1
і UК2
та опрацювати їх результати
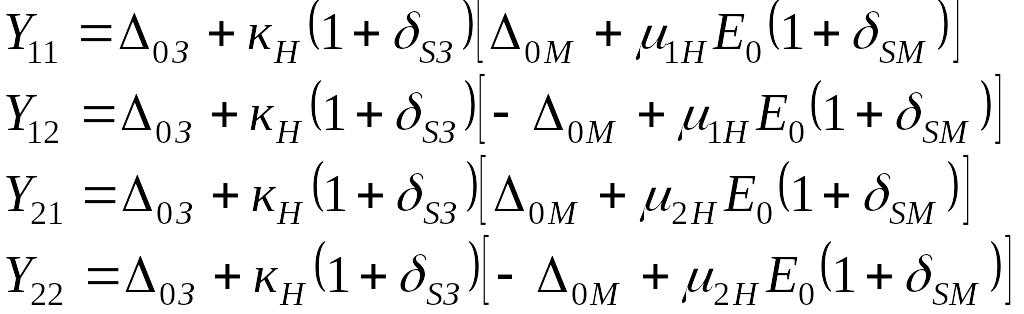 ,
(2.12)
,
(2.12)
де Y11,
Y12
– покази перевірюваного (контрольованого)
ЗВТ для вихідних напруг UК11
та UК12
калібратора,
відповідно, за одного та іншого положення
перемикачів полярності ПП1 та ПП2, та
встановленому номінальному значенні
коду керування m1Н;
Y21,
Y22
– покази ЗВТ для вихідних напруг UК21
та UК22
калібратора, відповідно, за одного та
іншого положення перемикачів полярності
ПП1 та ПП2, та встановленні номінального
значення коду керування m2Н;
D0З
– АСП ЗВТ; D0М
– АСП кодокерованої міри; кН
–
номінальний коефіцієнт перетворення
ЗВТ;
![]() - коефіцієнти МСП, відповідно ЗВТ та
кодокерованої міри; Е0
– значення напруги джерела опорної
напруги ДОН; m1Н,
m2Н
–
номінальні значення кодів керування
кодокерованої міри при встановленні
значень вихідної напруги UК1
та UК2.
- коефіцієнти МСП, відповідно ЗВТ та
кодокерованої міри; Е0
– значення напруги джерела опорної
напруги ДОН; m1Н,
m2Н
–
номінальні значення кодів керування
кодокерованої міри при встановленні
значень вихідної напруги UК1
та UК2.
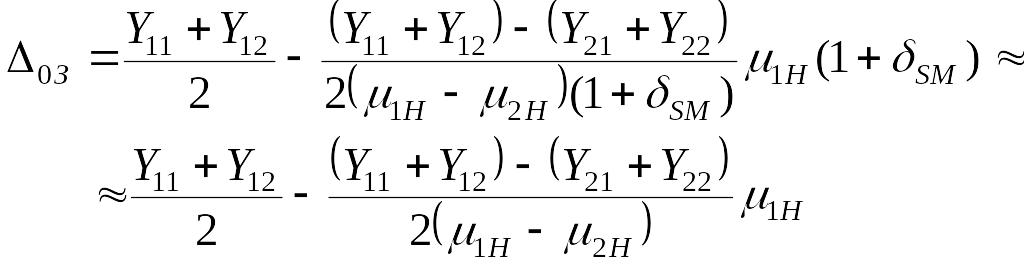
Із системи рівнянь (2.12) визначаються і коефіцієнт МСП, і АСП
 ,
(2.13)
,
(2.13)
 .
(2.14)
.
(2.14)
Аналіз
співвідношень (2.13) та (2.14) показує, що за
виконання умови
![]() ,
методом подвійної інверсії коригується
АСП калібратора напруги і достатньо
просто визначаються АСП та МСП
контрольованого ЗВТ в робочих умовах
експлуатації.
,
методом подвійної інверсії коригується
АСП калібратора напруги і достатньо
просто визначаються АСП та МСП
контрольованого ЗВТ в робочих умовах
експлуатації.
Скориговане значення Δк АСП, після автоматичного коригування, визначатиметься вибраним методом та алгоритмом корекції, тому в подальшому слід детальніше проаналізувати граничні можливості існуючих методів корекції.