

15.3. Аналіз традиційних шляхів реалізації кодокерованих мір індуктивності
Згідно з нормативними документами [137, 138] для відтворення індуктивностей в діапазоні 10-9…10 Гн на частотах 40…1000 Гц із похибками (0,05...0,3) % використовується метод непрямих вимірювань з використанням складеної Т-подібної міри (рис. 15.2). Перетворивши зірку в еквівалентний трикутник отримаємо значення еквівалентного комплексного опору Z12
![]() , (15.7)
, (15.7)
де Lекв=С1R1R2 –еквівалентна відтворювана складеною мірою індуктивність.
Недоліком такої міри є мала її добротність, причому із зміною індуктивності Lекв вона також може змінюватись. За допомогою такої міри
Рис. 15.2. Схема
складеної Т-подібної міри–імітатора
індуктивності
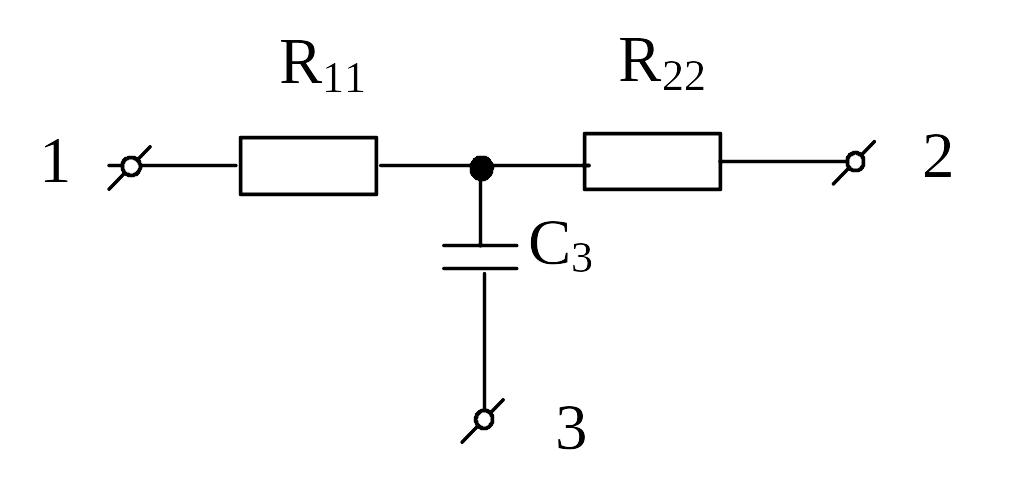
можна повіряти схеми лише з три- або п’ятиполюсним підключенням вимірюваної індуктивності. Крім того, на базі складеної міри індуктивності практично дуже проблематично реалізувати кодокеровані міри, що унеможливлює автоматизацію повірки вимірювачів індуктивності в діапазоні 1…104 Гн [138]. Це суттєво зменшує продуктивність праці при здійсненні повірки, оскільки, наприклад, при повірці визначаються похибки мостів на кожній цифрі старшого розряду та всіх цифрах решти розрядів (20 точок вимірювання) [137].
Трансформаторні міри імпедансу характеризується достатньо широким динамічним діапазоном та точністю [128-132]. Але, прецизійні трансформаторні міри доволі складні в реалізації, потребують використання однозначних мір індуктивності великого значення.
Загальними недоліками реалізації кодокерованих мір індуктивності на основі ОП з багатопетлевим зворотнім зв’язком є наявність паразитних активних опорів та неможливість використання КПН (здебільшого використовуються кодокеровані магазини опору).
15.4. Обґрунтування методу побудови кодокерованих мір індуктивності
Аналіз показує, що для побудови кодокерованих багатозначних мір індуктивності найдоцільніше використовувати метод імітації комплексного опору. Відомі технічні рішення цієї задачі дають можливість реалізувати тільки однозначні імітатори індуктивного опору [6, 127, 137]. Для побудови багатозначної кодокерованої міри індуктивності пропонується використовувати подібні до структур двозатискачевих імітаторів активного електричного опору пристрої, оскільки як активний, так і індуктивний опори, на відміну від ємнісного, є прямо пропорційними параметрами в законі Ома для ділянки кола. Принцип дії таких імітаторів полягає у відтворенні закону Ома для ділянки кола на основі операційних підсилювачів (ОП) та ЦАП. На опорному елементі ZN створюється взірцевий спадок напруги UN, який помножується на коефіцієнт m за допомогою ЦАП mUN та інвертується. Вихідною напругою такого імітатора є алгебраїчна сума Ui спадку напруги на взірцевому елементі та інвертованої напруги, а імітоване ним значення опору Zi між парою вихідних затискачів дорівнюватиме Zi=Ui/Ii=(1-m)ZN, де Ii - струм, який протікає через імітатор. Для буферизації основних елементів імітатора використовуються повторювачі напруги на базі неінвертуючих ОП [111, 112], або ОП з гальванічно розділеними живленнями [113, 114]. Аналіз показує, що на змінному струмі доцільно використовувати перший тип повторювачів, оскільки значення похибки, зумовленої синфазною складовою, є меншою від похибки за рахунок шунтування частотозалежним опором гальванічного розділення вихідної напруги ЦАП. Крім того, для реалізації кодокерованої міри індуктивності в мікроелектронному виконанні бажано мінімізувати кількість активних компонентів та використовуваних джерел живлення. На основі проведеного аналізу розроблена структура кодокерованого імітатора індуктивності (рис. 15.3) [139].
Рис. 15.3. Функціональна
схема кодокерованого імітатора
індуктивності
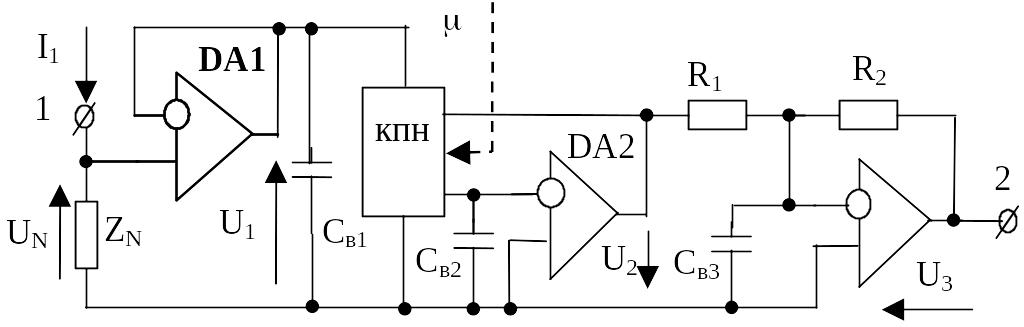
Імітований схемою комплексний опір Zi визначається за формулою
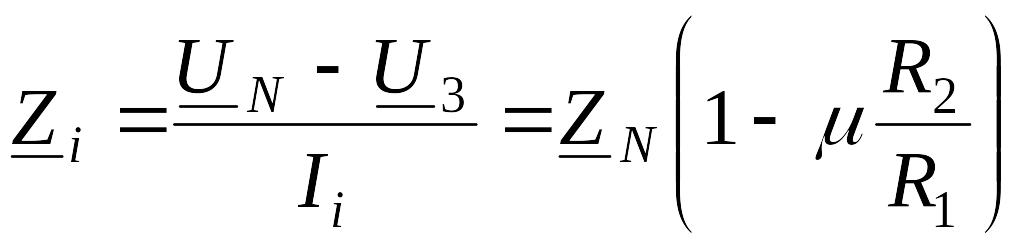 .
(15.8)
.
(15.8)
Як видно з формули (15.8) похибка імітованого комплексного опору визначатиметься похибкою взірцевого елементу ZN, коефіцієнта m передачі ЦАП, похибкою відношення масштабних резисторів, похибками та частотними властивостями ОП DA1, DA2. Метрологічні параметри опорної індуктивності в значній мірі визначатимуть характеристики кодокерованої міри індуктивності на базі імітатора. Зауважимо, що в поданій реалізації опорний елемент повинен бути "заземленою" індуктивністю. Поза жодним сумнівом, що за умови забезпечення можливості виконання у вигляді інтегральної мікросхеми, опорний індуктивний елемент слід реалізовувати як імітатор індуктивності на базі активних RC-схем. На основі аналізу величезного різноманіття схем імітаторів індуктивності зроблений висновок, що найповніше задовольняють вимогу "максимально можлива точність - мінімальні апаратні затрати" структури із багатопетлевим зворотнім зв`язком та гіратори. Тому вважаємо доцільним співставити особливості їх реалізації. Схема імітатора індуктивності на базі ОП з багатопетлевим зворотнім зв`язком і компенсацією паразитних параметрів наведена на рис. 15.4.
Рис. 15.4. Схема
імітатора індуктивності на базі ОП з
багатопетлевим зворотнім зв`язком
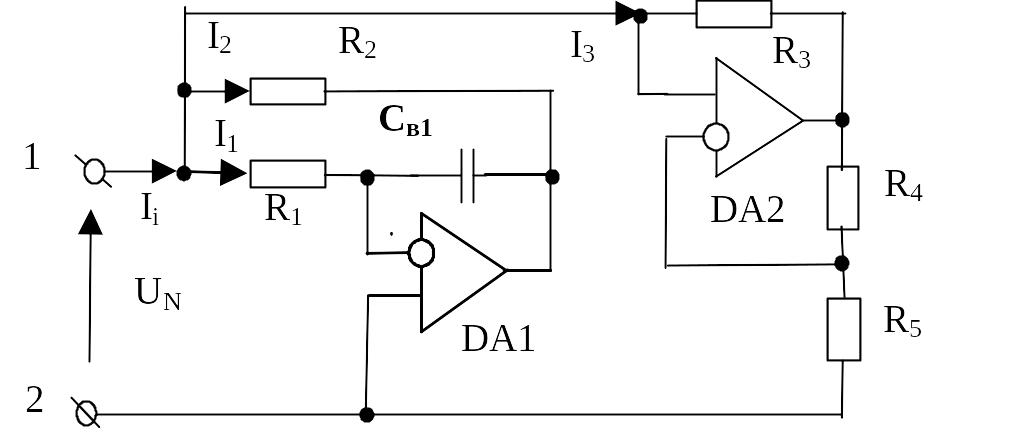
Вхідна провідність Y1N схеми рис. 15.4 визначається як (всі позначення наведені на рисунку)
 ,
(15.9)
,
(15.9)
При виконанні
умови
 ,
вхідний опір Z1N
схеми дорівнюватиме
,
вхідний опір Z1N
схеми дорівнюватиме
![]() .
.
Нещодавно був запропонований, як п’ятий елемент електричних кіл (чотири основні – опір, ємність, індуктивність та ідеальний трансформатор) гіратор. Гіратором називається активний чотириполюсник, який в одному з напрямків передачі не змінює фази, а в протилежному змінює її на p радіан [140, 141], тобто при під’єднаній до другої пари затискачів ємності на першій буде відтворюватись індуктивність. Гіратор описується системою рівнянь [140, 141].
 (15.10)
(15.10)
де е1, і1 – напруга та струм на затискачах "1" гіратора; е2, і2 –напруга та струм на затискачах "2" гіратора; Rgy –опір гірації.
Третє рівняння системи (15.10) свідчить про те, що гіратор є чотириполюсником без втрат, або іншими словами, активним ідеальним елементом.
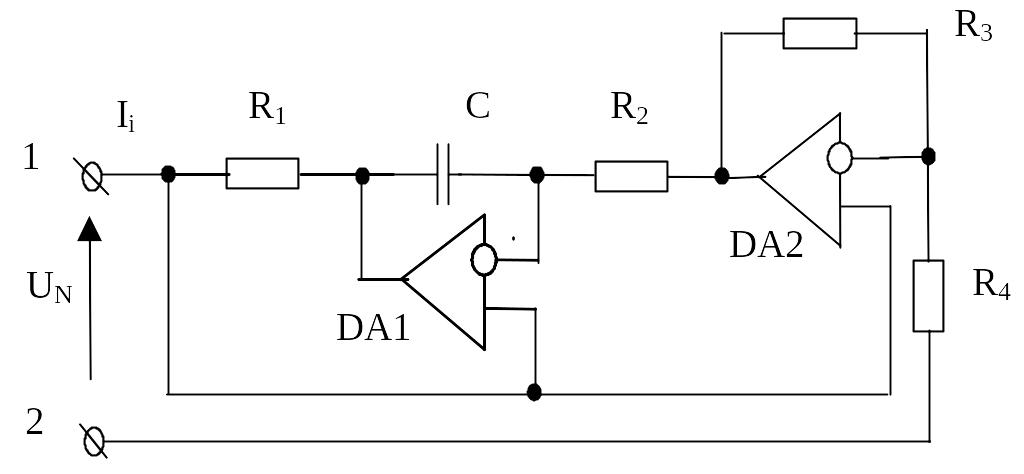
Практично такі ж апаратні затрати, як і для схем імітаторів індуктивності на базі ОП з багатопетлевим зворотним зв`язком і компенсацією паразитних параметрів, має гіраторна реалізація однозначної міри індуктивності (рис. 15.5). Значення відтворюваного схемою рис. 15.5 індуктивного опору Z2N визначатиметься рівнянням
 .
(15.11)
.
(15.11)
Рис. 15.5. Схема
гіраторного імітатора індуктивності

З порівняння виразів (15.9) та (15.11) можна зробити висновок про перевагу гіраторної реалізації. В областях або великих, або малих значень індуктивності за рахунок співмножника R4/R3 вона дає можливість вибирати ємність конденсатора в області прецизійних значень.
На основі запропонованого методу можна реалізувати широкодіапазонну кодокеровану міру індуктивності з використанням елементної бази широкого вжитку. Частотний діапазон такої міри визначатиметься практично тільки смугою пропускання ОП. Наприклад, при використанні широкосмугових ОП типу К153УД5 верхня гранична частота становитиме приблизно 10 кГц. За умови використання зовнішніх прецизійних RC-елементів запропонована структура кодокерованої міри індуктивності може реалізовуватись також в мікроелектронному виконанні.
Як видно з аналізу формули (15.11) піддіапазони імітованої індуктивності можна змінювати принципіально шляхом зміни значення параметрів будь-яких із елементів, які входять у структуру гіратора. На відміну від реалізації імітаторів індуктивності, описаних вище, дана структура гіратора не містить потенційно нестійких від’ємних опорів, не потребує для забезпечення високої добротності точного підбору параметрів компонентів. Параметри індуктивності визначатимуться в першу чергу параметрами резисторів R1-R4 та конденсатора С2, а також неідеальністю операційних підсилювачів, які входять у його структуру.