

1.4. Методи метрологічної перевірки
Перевірна схема – це документ, що встановлює засоби, методи і точність передавання розміру одиниці даної величини від еталона до вихідного ЗЗВ робочим ЗВТ. Перевірні схеми зображаються як послідовна розгалужувальна схема, кожна із ступенів якої відповідає передаванню розміру одиниці фізичної величини між еталонами, ЗЗВ і робочими ЗВТ [4-6].
Перевірна схема регламентує порядок і точність передавання одиниць, методи і засоби перевірки. Метрологічною перевіркою називається визначення похибок ЗВТ і встановлення факту його придатності до подальшого використання [1].
Для метрологічної перевірки мір та ЗВТ використовуються наступні методи [1].
1) порівняння з допомогою компаратора вихідної величини міри та еталона або зразкової міри для визначення систематичних похибок;
2) пряме вимірювання величини, відтворюваною мірою, ЗВТ вищого класу точності;
3) непряме вимірювання (виключно для мір);
4) калібрування набору мір через сукупні вимірювання виключно для мір).
Для метрологічної перевірки ЗВТ використовуються такі методи:
1) Метод безпосереднього порівняння перевірюваного ЗВТ із ЗЗВ того ж виду, при цьому похибка ЗВТ визначається як різниці показів обох ЗВТ (рис. 1.2). Відлік може здійснювати оператор, при цьому процес не може бути
Рис. 1.2. Метод
безпосереднього
порівняння
перевірюваного ЗВТ із зразковим засобом
вимірювання

автоматизованим. Для автоматизації процесу може використовуватись, звичайно при його наявності, компаратор з подальшим перетворенням його вихідного сигналу DП=CП-CN в цифровий.
2) Пряме вимірювання перевірюваним ЗВТ вихідного сигналу багатозначної міри (рис. 1.3) і визначення похибки як DП=CП-CN. Для автоматизації перевірки може використовуватись компаратор КМП та АЦП.
Р ис.
1.3. Метод прямого вимірювання перевірюваним
ЗВТ вихідного сигналу міри
ис.
1.3. Метод прямого вимірювання перевірюваним
ЗВТ вихідного сигналу міри
Методи повірки засобів вимірювань останнім часом автоматизовані із застосуванням засобів обчислювальної техніки і кодокерованих мір, завдяки чому в багато разів збільшується продуктивність праці. При автоматизованій повірці вимірювальних перетворювачів, цифрових вимірювальних і аналогових вимірювальних приладів ЕОМ за заданою програмою видає числові значення величини Nx, при яких повинні бути повірені засоби вимірювань. Ці значення подаються на вхід кодокерованої міри, на виході якої відтворюється величина ХN, розмір якої заданий. Величина ХN подається на входи повірюваних засобів вимірювань. Інформація з виходу повірюваних засобів подається на ЕОМ для обчислення похибок засобів і створення сигналів для відповідного документування результатів повірки.
1.5. Особливості проведення метрологічної перевірки
Згідно з вимогами нормативних документів повірка ЗВТ здійснюється в лабораторіях, в яких створені спеціальні, нормальні умови:
- температура (20±Δϴ)°C, де ϴ – залежно від класу точності ЗВТ;
- нормальний тиск 760 мм рт. ст.;
- відносна вологість 30-60%;
- напруженість магнітного поля не більше 400 А/м;
- відсутність ударів, тряски, вібрацій, зовнішніх випромінень, які можуть впливати на метрологічні параметри ЗВТ.
Проведення повірки вимагає демонтажу приладів з технологічних об’єктів і транспортування їх до лабораторій. Крім чисто технічних і організаційних незручностей та фінансових затрат, повірка ЗВТ до певної міри, в “тепличних” умовах не відображатиме більшості їх метрологічних особливостей в реальних умовах експлуатації. Крім того, при цьому не перевіряються інші ланки вимірювального кола (рис. 1.4). Генеральною тенденцією розвитку вимірювальної техніки і створення перетворювачів фізичних величин в
Р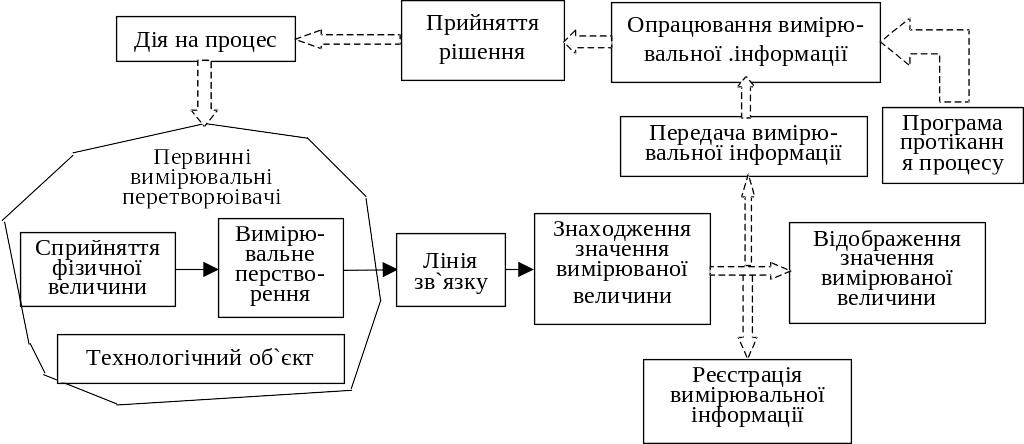 ис.
1.4. Узагальнена структурна схема
вимірювального кола технологічних ЗВТ
ис.
1.4. Узагальнена структурна схема
вимірювального кола технологічних ЗВТ
електричні сигнали, особливо напівпровідникових, мікроелектронних, з подальшою їх обробкою. Вибір електричних сигналів зумовлений їх відомими практичними перевагами [1, 2]:
- універсальність – можливість вимірювання як електричних, так і неелектричних величин, попередньо перетворених в електричні;
- дистанційність – можливість передачі вимірювальної інформації практично на будь-яку відстань (провідні або безпровідні лінії зв’язку);
- простота автоматизації за рахунок можливості простого стикування із засобами обчислювальної техніки;
- можливість вимірювання швидкоплинних процесів завдяки малій інерційності ЗВ електричних величин;
- можливість зміни в широких межах чутливості і точності.
Н а
сьогодні бурхливо розвивається напрям
так званих віртуальних вимірювальних
систем (ВВС) (рис. 1.5). Зазвичай локальні
вимірювальні
а
сьогодні бурхливо розвивається напрям
так званих віртуальних вимірювальних
систем (ВВС) (рис. 1.5). Зазвичай локальні
вимірювальні
Рис. 1.5. Структура віртуальних вимірювальних систем
станції (ЛВС) розпорошені на технологічному об’єкті що вимагає додаткових матеріальних затрат для організації системи контролю та регулювання параметрів технологічних процесів. На багатьох об’єктах можливе використання існуючої комп’ютерної мережі як швидкої магістралі для пересилання вимірювальної інформації без необхідності встановлення додаткових фізичних кабелів. Таким чином, вся вимірювальна інформація з вимірювальних перетворювачів (ВП) та ЛВС може передаватися до центрального комп’ютера – диспетчерського пульта з метою її опрацювання та прийняття необхідних рішень для потреб регулювання параметрів технологічних процесів. Такі системи отримали назву віртуальні, оскільки в них фактично немає класичного для цифрових приладів та систем блоку індикації. Вся інформація виводиться на дисплей комп’ютера.
Повірка таких вимірювальних систем в лабораторних умовах втрачає сенс, оскільки вимагає демонтажу всієї системи. У випадку проведення повірки окремо ВП і ЛВС, на місці експлуатації слід перевірити функціонування модемів, ліній зв’язку та центрального комп’ютера. Оскільки розвиток віртуальних систем збору і оброблення вимірювальної інформації є загальною тенденцією розвитку технічних систем в напрямі їх автоматизації, то доцільно переглянути традиційні методи і методики повірки. Економічно найдоцільніше проводити повірку безпосередньо на місці експлуатації. Для здійснення цього потрібні Кодокеровані міри фізичних величин та розроблення відповідного програмного забезпечення. Очевидно, що для повірки всього вимірювального тракту необхідні кодокерованi міри фізичних величин з можливістю їх розміщення безпосередньо в технологічних об'єктах. У більшості практичних випадків це або технічно неможливо (наприклад, АЕС), або складно і, відповідно, дорого.