14.2. Коригування похибок трансформаторних мір імпедансу
Коригування значень похибок γ1 і γ2 за рахунок сформованого на додаткових елементах компенсувального впливу, може здійснюватися безпосереднім його додаванням до сумарної напруги, на основних та допоміжних елементах імпедансу або із збільшенням струму міри. Одночасна компенсація значень похибок γ1 і γ2 здійснюється шляхом безпосереднього підсумовування напруг (рис. 14.2.). Пристрій містить двообмотковий (Тр1) і триобмотковий (Тр2) трансформатори, а також основний Z0 та допоміжний Z01, елементи імпедансу.
Рис. 14.2. Схема
трансформаторної міри імпедансу з
коригуванням похибок
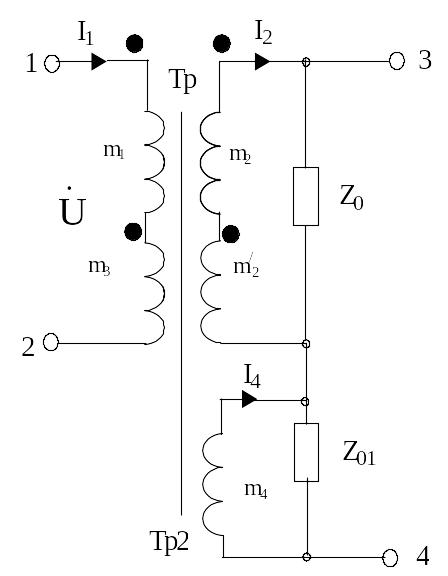
Основним
трансформатором в цьому пристрої є Тр1,
що формує робочий струм
![]() ,
який створює напругу на основному
елементі Z0.
За рахунок струму намагнічення осердя
Тр1 напруга на елементі Z0
формується
з похибкою. Для компенсації похибки в
даному пристрої використовують Тр2 і
елемент Z01.
В обмотці m4
цього трансформатора формується струм
,
який створює напругу на основному
елементі Z0.
За рахунок струму намагнічення осердя
Тр1 напруга на елементі Z0
формується
з похибкою. Для компенсації похибки в
даному пристрої використовують Тр2 і
елемент Z01.
В обмотці m4
цього трансформатора формується струм
![]() ,
який рівний струмові вторинного кола
намагнічення осердя Тр1. При рівних
імпедансах взірцевих елементів Z0=Z01
і однакових числах витків в первинній
обмотці трансформатора m1=m3
вираз для струмів, які протікають, мають
вигляд:
,
який рівний струмові вторинного кола
намагнічення осердя Тр1. При рівних
імпедансах взірцевих елементів Z0=Z01
і однакових числах витків в первинній
обмотці трансформатора m1=m3
вираз для струмів, які протікають, мають
вигляд:
 , (14.4)
, (14.4)
 , (14.5)
, (14.5)
 . (14.6)
. (14.6)
де
D
– визначник матриці опорів пристрою
(рис. 14.2); R22
– сумарний активний опір обмоток m/2;
R4
–
активний опір обмотки m4;
X2
– індуктивний опір обмотки m/2
і m4
(![]() );
х12
– опір взаємної індуктивності між
обмотками m1
і m2.
);
х12
– опір взаємної індуктивності між
обмотками m1
і m2.
Напруга на основному
![]() і додатковому
і додатковому
![]() елементах імпедансу рівна:
елементах імпедансу рівна:
 , (14.7)
, (14.7)
 . (14.8)
. (14.8)
Напруга на потенціальних затискачах пристрою рівна сумі напруг, сформованих на елементах Z0 і Z01 і рівна:
 (14.9)
(14.9)
Таким чином, напруга на потенціальних затискачах збільшуються за рахунок сформованого на Z01 напругу. Слід виділити, що в окремих обмотках, гальванічно не зв’язано з робочим колом пристрій. В результаті еквівалентного опору міри рівно:
 (14.10)
(14.10)
де
 ;
;
 ;
;
 .
.
Вираз (14.10) показує, що розділення робочого кола міри і кола компенсації дозволяє ефективніше використовувати для формування компенсувальної напруги додатковий елемент Z01 При цьому взірцевий елемент Z0 практично не шунтується елементами кола компенсації. Це дозволяє повністю компенсувати в пристрої дві складові похибки γ1, γ2. Поява похибок другого порядку малості γ3, γ4, γ5 пов’язана з неповним розмагніченням осердя Тр2 і впливом струму намагнічення цього осердя.
У
зв’язку з тим, що напруга компенсації
суттєво менша від напруги на основному
елементі
![]() вимоги до похибки елемента Z01
значно нижчі, ніж до точності елемента
Z0.
вимоги до похибки елемента Z01
значно нижчі, ніж до точності елемента
Z0.
14.3. Активні імітатори імпедансу
Аналіз показує, що недоліками кодокерованих магазинів імпедансу є вплив залишкових параметрів комутаційних елементів. Одиниця молодшого розряду кодокерованого магазину імпедансу обмежується значенням опору Rзs замкненого ключа, і на частоті 50 Гц не дає змоги реалізувати магазин з дискретністю відтворення меншою від 0,1 Ом, оскільки опір Rзs для найкращих герконових ключів становить 0,05 Ом. При відтворенні великих значень імпедансу суттєво впливатиме опір Rps розімкненого ключа, оскільки їх значення стають співмірними. Частотний діапазон кодокерованого магазину імпедансу обмежений паразитними ємностями Сs розімкненого ключа. Крім того, в кодо-керованому магазині імпедансу повинен бути передбачений захист ключів від перенапруг в перехідних режимах. Це, до того ж, суттєво обмежує швидкодію магазину імпедансу
Вказані недоліки змушують шукати інші методи побудови кодокерованих багатозначних мір імпедансу. Найбільшим недоліком фізичної котушки індуктивності, особливо великих значень і низькочастотних, є їх мала добротність, яка принципово обмежується активним опором Rl котушки. З цієї точки зору основну увагу слід звернути на ”безіндуктивні” методи реалізації індуктивностей.
14.3.1. Імітатори на основі ОП з багатоланковим зворотнім зв’язком. В загальному випадку на базі одного активного елементу, охопленого зовнішнім зворотнім зв’язком через зразковий реактивний елемент, може бути реалізований імітатор реактивного опору (рис. 14.3) [133].
Рис. 14.3. Схема імітатора реактивного опору
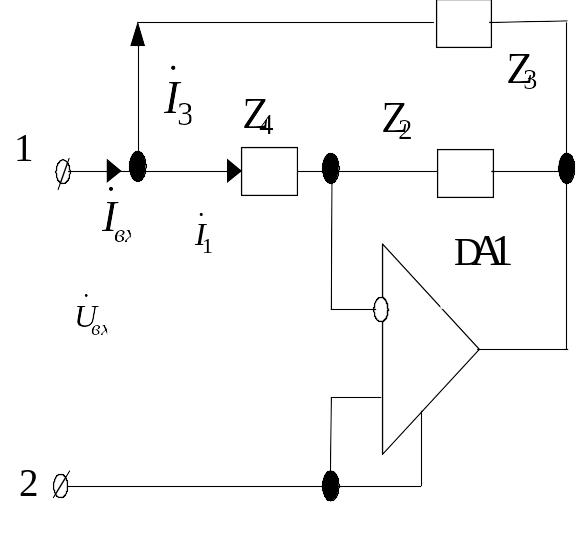
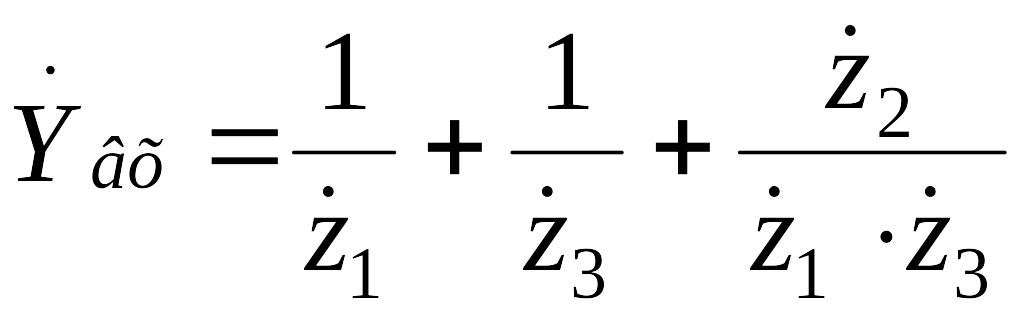
Вхідну провідність
![]() визначимо із системи рівнянь:
визначимо із системи рівнянь:
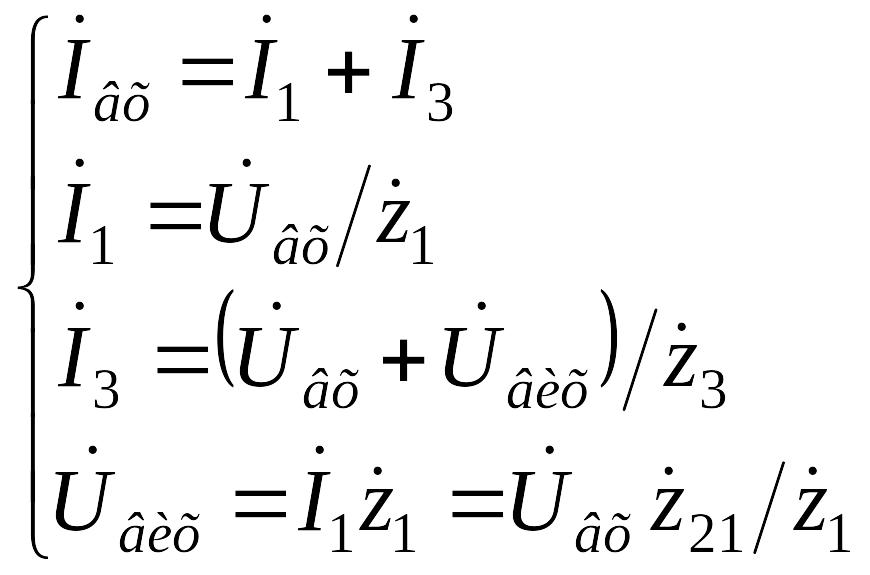 ,
(14.8)
,
(14.8)
 , (14.9)
, (14.9)
де
![]() ,
,
![]() - відповідно вхідна напруга міри та
вихідна напруга ОП DA1.
- відповідно вхідна напруга міри та
вихідна напруга ОП DA1.
14.3.2. Компенсація паразитних вхідних провідностей. Для компенсації паразитних вхідних провідностей можна використати конвертори від’ємного опору [61] (рис. 14.4). Вхідну провідність вказаної схеми (рис. 14.4) визначимо із системи рівнянь:
Рис. 14.4. Схема високодобротної реактивності
 (14.10)
(14.10)
 (14.11)
(14.11)
де позначення всіх елементів та струмів і напруг показано на рис.14.4.
При
виконанні умови:
![]() ,
вхідний опір схеми рис. 14.4 дорівнюватиме:
,
вхідний опір схеми рис. 14.4 дорівнюватиме:
 . (14.12)
. (14.12)
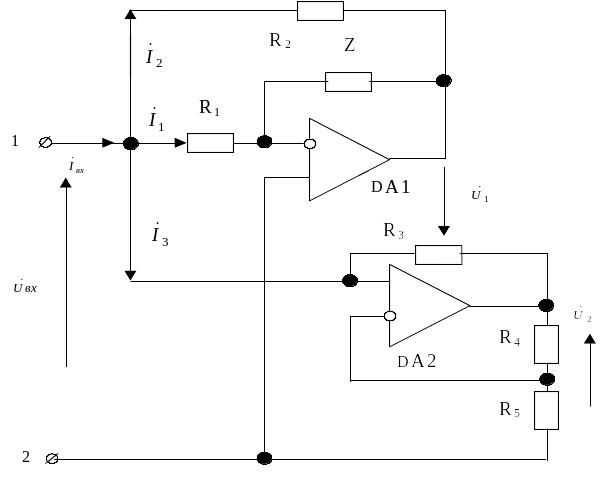
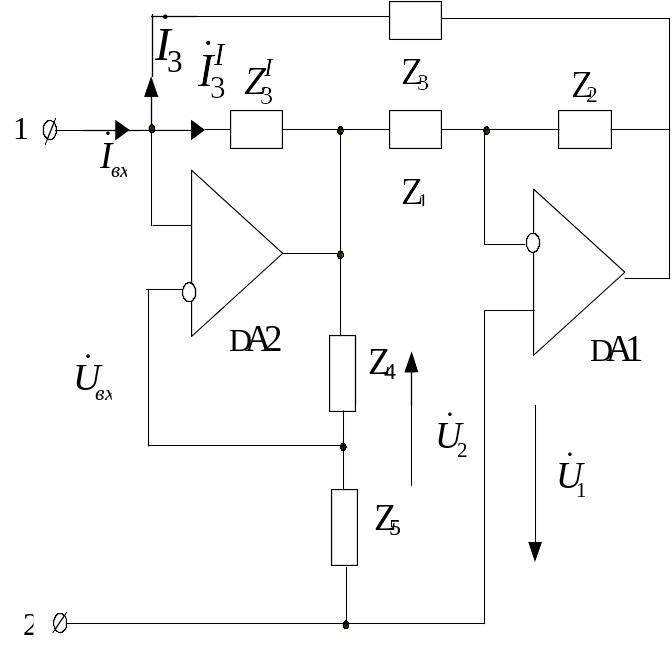
Аналіз співвідношення (14.12) показує, що структура, подана на рис. 14.4., виконуватиме роль високо добротної реактивності і може бути реалізована на основі RC-елементів. Для перемикань піддіапазонів відтворюваних реактивностей може бути використаний набір або взірцевих конденсаторів, або резисторів R1 та R3. Однак, ця структура має суттєві обмеження при відтворенні великих значень індуктивності через достатньо велике значення знаменника виразу (14.12) – коефіцієнта передачі ОП DA2 k2=1+R4/R3. З метою значного зменшення цього негативного впливу конвертор від’ємного опору потрібно підключати паралельно до входу підсилювача DA1 (рис. 14.5). Вхідну провідність цієї міри реактивності визначимо із системи рівнянь, складених на основі законів Кірхгофа
![]()
 (14.13)
(14.13)
 , (14.14)
, (14.14)
де всі позначення елементів, струмів та напруг приведені на рис. 14.5.
Якщо виконати
умову:
![]() ,
то вхідний опір схеми рис. 14.5 дорівнюватиме
,
то вхідний опір схеми рис. 14.5 дорівнюватиме
 . (14.15)
. (14.15)
Як видно з формули (14.15), порівняно із схемою рис. 14.5 еквівалентна реактивність збільшена в К2-1=R4/R5 разів.
Рис. 14.5. Схема імітатора реактивності великих значень