

13.5. Коригування похибок кодокерованих мір для дистанційного передавання значень опору
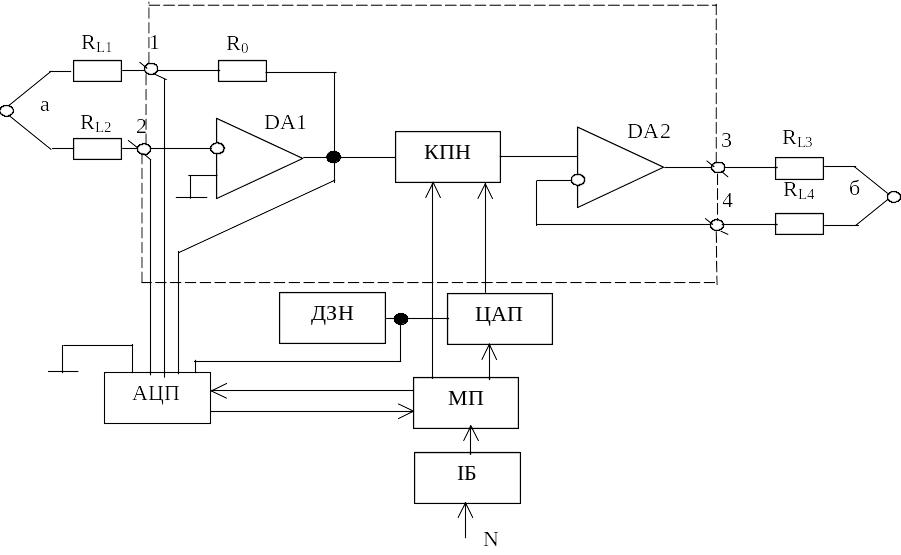
Використання мікропроцесорної техніки відкриває великі можливості для покращення метрологічних характеристик і розширення функціональних можливостей різних засобів вимірювання. На рис. 13.9. зображена структурна схема активного імітатора опору з мікропроцесором. Для зменшення впливу опорів ліній зв’язку застосовано чотири провідну схему під’єднання . Для проведення корекції похибки імітації опору додатково введено багатоканальний аналого – цифровий перетворювач АЦП і цифро – аналоговий перетворювач ЦАП з джерелом зразкової напруги ДЗН.
Вхідний код N, пропорційний коефіцієнту перетворення. Через інтерфейс ний блок ІБ надходить на мікропроцесор МП, а звідти – на вхід кодо- керованого подільника напруги КПН. У результаті між точками а і б імітується опір пропорційний вхідному коду N.
АЦП вимірює напругу в точках а, б, 1 і на виході операційного підсилювача DA1. При цьому значення імітованого опору між точками а і б визначається з виразу
 (13.29)
(13.29)
де IВХ - вхідний струм.
Вхідний струм проходить через зразковий резистор R0 і відповідно
Рис. 13.9. Структурна
схема АІО з мікропроцесорним керуванням
дорівнює
 (13.30)
(13.30)
Після підстановки значення струму Iвх у вираз (13.23) отримаємо
 (13.31)
(13.31)
При цьому дійсний коефіцієнт перетворення дорівнює
 . (13.32)
. (13.32)
Мікропроцесор
обчислює дійсний коефіцієнт перетворення
за формулою (13.26) і порівнює зі значенням
заданого коефіцієнта
![]() .
При нерівності
.
При нерівності
![]()
![]() необхідно повести корекцію, яка може
бути адитивною або мультиплікативною.
При адитивній корекції значення напруги
в точці б збільшується на DUК
для досягнення рівності
необхідно повести корекцію, яка може
бути адитивною або мультиплікативною.
При адитивній корекції значення напруги
в точці б збільшується на DUК
для досягнення рівності
 (13.33)
(13.33)
Значення напруги компенсації визначається з виразу
![]() . (13.34)
. (13.34)
ЦАП формує напругу
компенсації
![]() пропорційно
вхідному коду і подає її на вхід КПН.
При цьому корекцію необхідно проводити
при кожній зміні вхідного коду.
пропорційно
вхідному коду і подає її на вхід КПН.
При цьому корекцію необхідно проводити
при кожній зміні вхідного коду.
Для проведення мультиплікативної корекції похибки отримане значення імітованого опору множиться на коригувальний коефіцієнт kμ
![]() . (13.35)
. (13.35)
При цьому необхідно щоб виконувалася рівність
![]() . (13.36)
. (13.36)
Відповідно значення коректую чого коефіцієнта дорівнює
 . (13.37)
. (13.37)
Мікропроцесор обчислює значення коригувального коефіцієнта і на вхід КПН подає код
![]() . (13.38)
. (13.38)
Недоліком
мультиплікативної корекції є те, що її
неможливо проводити при
![]() Адитивну корекцію можна проводити в
цілому діапазоні імітації опору.
Адитивну корекцію можна проводити в
цілому діапазоні імітації опору.
Висновки. Найоптимальнішим варіантом є адитивна корекція на початку діапазону і мультиплікативна в кінці діапазону.
Похибка імітації
опору визначається похибками зразкового
резистора R![]() і
АЦП. Для зменшення випадкових похибок
АЦП необхідно, щоб мікропроцесор
усереднював результати окремих
вимірювань і обчислював дійсний
коефіцієнт передачі за формулою
і
АЦП. Для зменшення випадкових похибок
АЦП необхідно, щоб мікропроцесор
усереднював результати окремих
вимірювань і обчислював дійсний
коефіцієнт передачі за формулою
 (13.39)
(13.39)
де g(n) – вагова функція.
Контроль терморезистивного вимірювального каналу в цілому з використанням зразкових мір опору на основі активних імітаторів інваріантних до впливу ліній зв’язку і мікропроцесорної техніки забезпечує необхідну достовірність результатів контроль і підвищує метрологічну надійність вимірювального канал енергетичних об’єктів.