

13.2. Чотирипровідні кодокеровані імітатори опору
Для дистанційного передавання значень електричного опору необхідно використовувати чотирипровідні кодокеровані міри, що відкриває принципову можливість коригування залишкових параметрів ліній зв’язку.
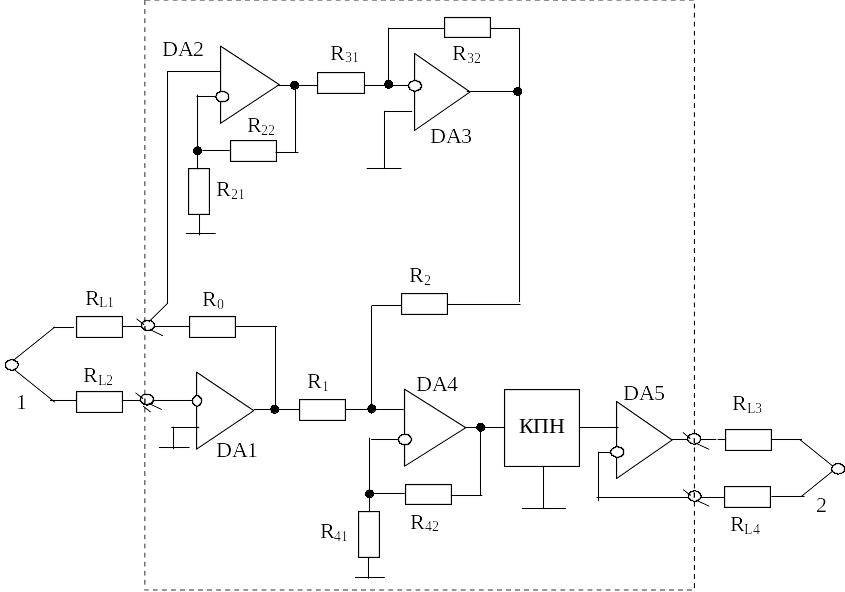
У запропонованій КМО застосована схема компенсації впливу опору лінії зв'язку, під’єднаної послідовно iз зразковим резистором, яка побудована на операційних підсилювачах DА2, DАЗ, DА4 (рис. 13.2). Суть компенсації полягає у виділенні спаду напруги на лінії зв'язку з наступним відніманням її значення від вихідної напруги oперaцiйного підсилювача DА 1.[127]
Рис. 13.2. Структурна
схема КМО з компенсацією опорів ліній
зв’язку
Значення
вихідної напруги операційного підсилювача
DA1 з урахуванням опру лінії RL1
і напруги зміщення нульового рівня
![]() операційного підсилювача DA1 знаходять
за формулою
операційного підсилювача DA1 знаходять
за формулою
![]() , (13.1)
, (13.1)
де
I![]() значення
вхідного струму; R0
значення опору зразкового резистора.
значення
вхідного струму; R0
значення опору зразкового резистора.
На вхід операційного підсилювача DА2 надходить напруга, значення якої дорівнює: ΔU1+IвхRL1.
Вихідна напруга операційного підсилювача DАЗ з урахуванням напруг зміщення нульового рівня операційних підсилювачів DА2 і DАЗ дорівнює
![]() (13.2)
(13.2)
де k1=(1+R22/R21), k2=R32/R31 - коефіцієнти передачі відповідно DА2 і DАЗ; ΔU2, ΔU3 - значення напруг зміщення нульового рівня операційних підсилювачів DА2 і DАЗ.
Вихідні напруги операційних підсилювачів DA1 і DA3 підсумовуються на резисторах R1 та R2 і на виході операційного підсилювача DA4 отримуємо
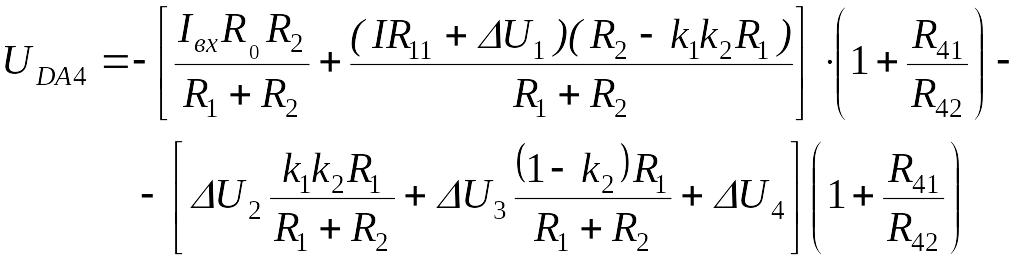 (13.3)
(13.3)
де ΔU4 - значення напруги зміщення нульового рівня операційного підсилювача DA4.
Як видно з формули
(13.3), для повної компенсації впливу
лінії зв’язку необхідно, щоб
![]() і
і
![]() .
При цьому
на вхід КПН надходить напруга:
.
При цьому
на вхід КПН надходить напруга:
 . (13.4)
. (13.4)
В результаті значення імітованого опору дорівнює:
 , (13.5)
, (13.5)
де k – коефіцієнт передачі подільника напруги; ΔU5 - значення напруги зміщення нульового рівня операційного підсилювача DA5.
З формули (13.5) видно, що запропонована схема активного імітатора забезпечує повну компенсацію впливу опору лінії зв’язку RL1 і напруги зміщення операційного підсилювача DA1. Напруга зміщення операційних підсилювачів DA2, DA3, DA4 компенсуються частково. Опори ліній зв’язку RL2 і RL3 не впливають на значення імітованого опору, оскільки вони увімкнені послідовно з високоомними входами операційних підсилювачів DA1 і DA2. Опір з’єднувального провідника RL3 увімкнений у зворотній зв'язок підсилювача DA5 і його вплив зменшується в k05 разів, де k05 - коефіцієнт операційного підсилювача DA5.
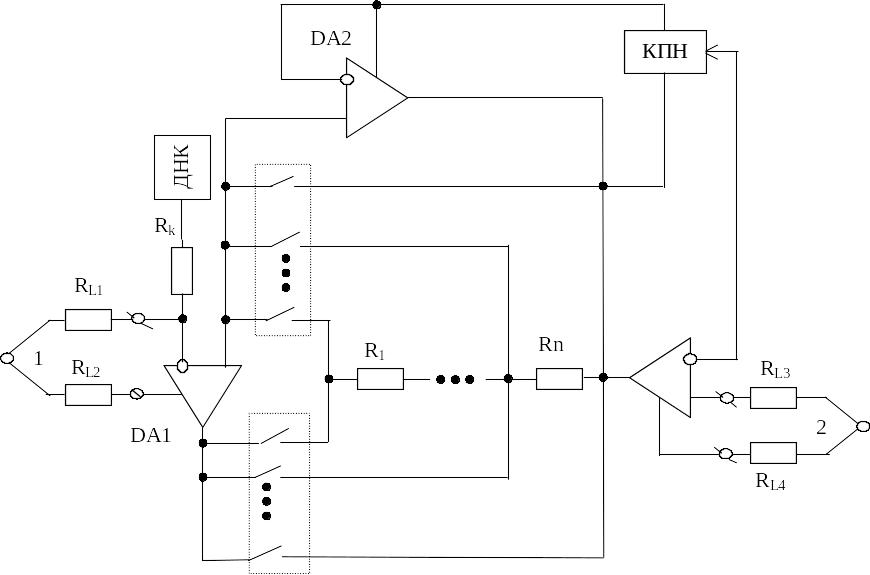
Ця схема компенсації впливу опору лінії зв’язку може бути також використана для компенсації впливу опорів ключів, які перемикають діапазони імітації опору (рис.13.3).
Рис. 13.3. Структурна
схема КМО з гальванічно розділеними
операційними підсилювачами
При дистанційному передаванні значень електричного опору суттєво можуть впливати частотні властивості кодокерованих мір – імітаторів опору.