

5.4. Високочастотні lc-генератори
Більшість високочастотних генераторів є LС-генераторами і будуються на основі триточкової схеми (рис.5.9) [59].
Рисунок 5.9 - Узагальнена схема LC-автогенератора
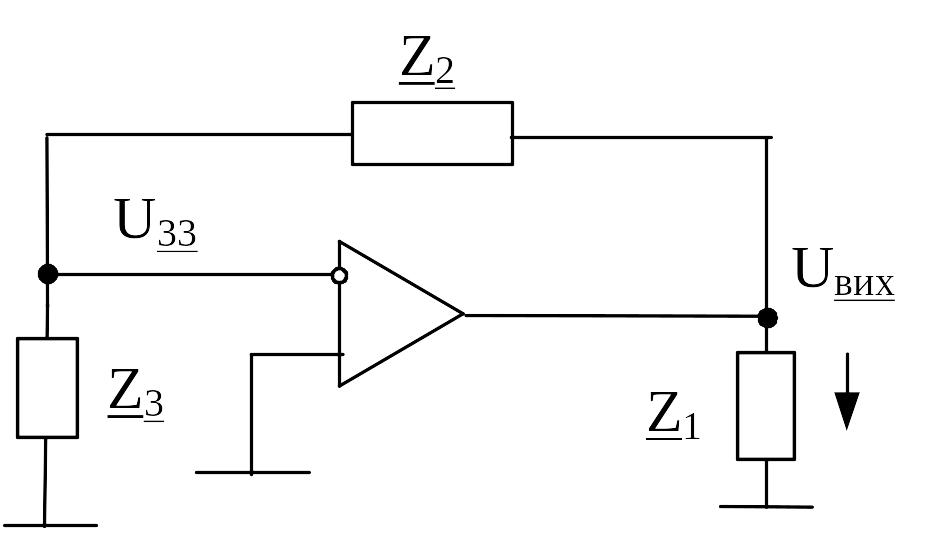
Нехай комплексні опори Z1, Z2, Z3 є чисто реактивними: Z1=jХ1; Z2=jX2; Z3=jX3. На резонансній частоті вхідна провідність чотириполюсника зворотного зв’язку дорівнює Yвх=0 (вхідний опір є нескінченно великим).
 (5.10)
(5.10)
звідки
випливає умова самозбудження
![]() .
.
Для виконання балансу фаз в генераторі з інвертувальним підсилювачем необхідно, щоб елементи Z1 та Z3 були вибрані реактивними опорами однакового типу, а Z2 - протилежного до них типу реактивності. Отже, можливі лише два варіанти побудови триточкових схем LС-автогенераторів: ємнісна триточка (рис. 5.10.а) та індуктивна триточка (рис. 5.10.б), для яких резонансні частоти подамо виразами
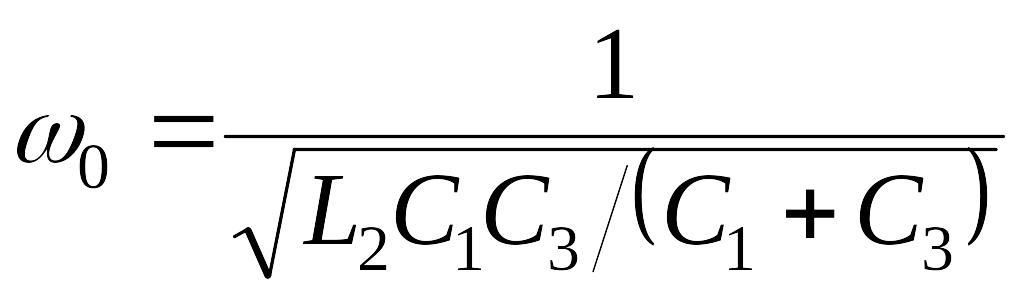 ,
(5.11)
,
(5.11)
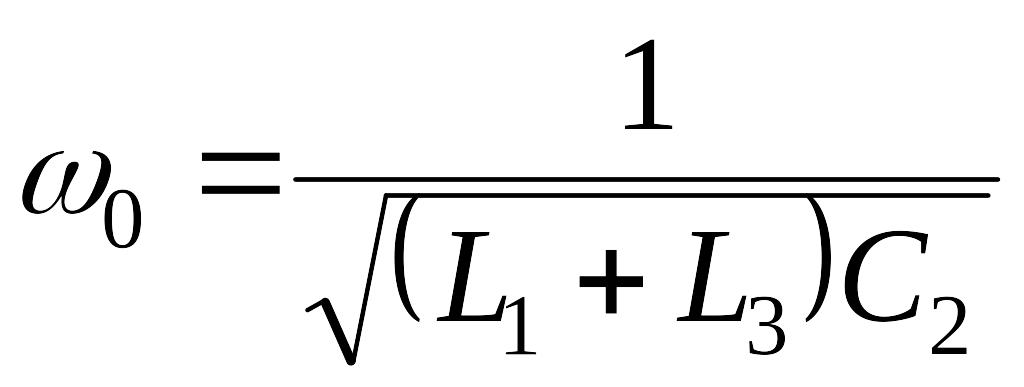 .
(5.12)
.
(5.12)
В LC-генераторах, як правило, немає необхідності в стабілізації амплітуди коливань, оскільки, завдяки високій вибірності LC-чотириполюсника зворотного зв’язку, він виділяє основну гармоніку, яка дорівнює резонансній частоті коливального контура й одночасно послаблює вищі гармоніки, навіть
Р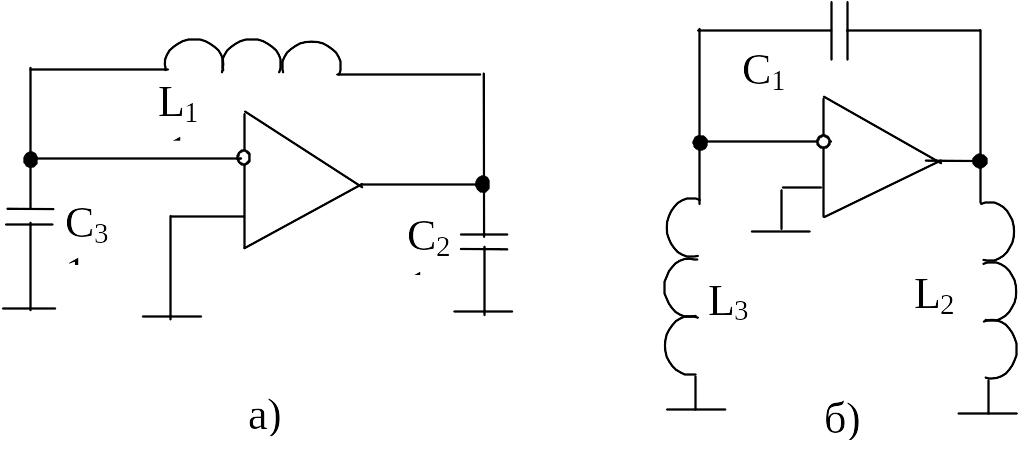 ис.
5.9. Узагальнена схема LC-автогенератора
ис.
5.9. Узагальнена схема LC-автогенератора
якщо підсилювальний елемент працює в режимі відтину струму та насичення.
5.5 Стабілізація частоти генераторів
Як
видно з формул для вихідної частоти
приведених вище автогенераторів,
стабільність генерованої частоти в
основному визначається стабільністю
RC- або LC-елементів. Стабільність частоти
є одним із найважливіших параметрів
автогенераторів. Нехай вихідна напруга
генератора UВИХ(t)
змінюється за законом
![]() ,
де wo
– номінальне значення частоти; j(t)
– фазовий зсув, часова нестабільність
якого визначає відхилення миттєвого
значення частоти від номінальної.
Миттєве значення частоти рівне w(t):
,
де wo
– номінальне значення частоти; j(t)
– фазовий зсув, часова нестабільність
якого визначає відхилення миттєвого
значення частоти від номінальної.
Миттєве значення частоти рівне w(t):
![]() ,
(5.13)
,
(5.13)
абсолютна похибка Dw:
![]() ,
(5.14)
,
(5.14)
відносна похибка dw:
 ,
(5.15)
,
(5.15)
де Qк – добротність кола зворотного зв’язку; DjЗВ – фазовий зсув в колі зворотного зв’язку.
Температура навколишнього середовища впливає на всі елементи схеми автогенератора. Відносні температурні зміни RLC-елементів визначаються їх температурними коефіцієнтами, відповідно, опору aR ємності aC, індуктивності aL
 (5.16)
(5.16)
де Dq=q–q0 – відхилення температури довкілля q від нормального значення q0.
3 температурою змінюється і коефіцієнт передачі підсилювального елементу, що порушує умову балансу амплітуд для даної частоти. Радикальним способом боротьби є активне термостатування частотозадавальних параметрів автогенераторів та вибір стабільних RLC – елементів. Автогенератори потрібно живити від стабілізованого джерела живлення, оскільки при зміні напруги живлення змінюється і коефіцієнт передачі підсилювача. Під час вібрацій, ударів виникають взаємні зсуви окремих деталей та змінюються паразитні ємності між ними, тому деталі потрібно механічно жорстко закріплювати, а в прецизійних генераторах необхідно амортизувати RLC-елементи. Забезпечити найвищу стабільність частоти в автогенераторах можна за рахунок використання високодобротних коливальних систем. В першу чергу до них відносяться п'єзоелектрики, добротність серійних взірців становить десятки-сотні тисяч, а прецизійних сягає навіть декількох мільйонів. П'єзоелектрики перетворюють прикладену змінну напругу в механічні коливання або типу стиску-розтягу (низькочастотні п’єзоелементи 50...500 кГц), або зсуву (високочастотнi п’єзоелементи 0,5...30 МГц). Температурний коефіцієнт частоти становить (1...2)∙10-6 1/0С в діапазоні температур –60...+100 0С. Еквівалентна схема кварцевого резонатора зображена на рис. 5.11, а частотні характеристики – на рис. 5.12. Типові значення заступної схеми кварцевого резонатора такі: ємність тримача кварцу С0=2...8 пФ, індуктивність кварцу Lкв=0,1...1 мГн, ємність кварцу Скв=0,01...0,1 пФ. LCR - параметри характеризують динамічні властивості кварцевого резонатора, відповідно, інерційні, пружні та втрати енергії.
Існує дві власні резонансні частоти резонатора: а) частота послідовного
Рис. 5.11. Еквівалентна
схема кварцевого резонатора
Рис.
5.12.
Частотні
залежності складових опору кварцевого
резонатора
резонансу
 та частота паралельного резонансу
та частота паралельного резонансу
![]() .
.
В діапазоні частот w1<w<w2 реактивна складова кварцу має індуктивний характер і завдяки високій добротності кварц має дуже велику крутизну фазо-частотної характеристики, що забезпечує умову балансу фаз автогенератора. Кварцеві резонатори використовують, як індуктивність (триточкові схеми автогенераторів), або як послідовне коливальне коло.
Для звукового
діапазону частот немає кварцевих
резонаторів і, тому, автогенератори
мають невисокі метрологічні параметри.
Суттєво покращити стабільність частоти
низькочастотних генераторів дає
можливість застосування принципу
синтезу частот (рис. 5.13). Г

 енератор
низької частоти ГЗЧ генерує напругу
синусоїдної форми з частотами в діапазоні
F=445...555 кГц. Частота кварцового генератора
fкв=5
МГц подільником ПЧК поділяється на 9,
енератор
низької частоти ГЗЧ генерує напругу
синусоїдної форми з частотами в діапазоні
F=445...555 кГц. Частота кварцового генератора
fкв=5
МГц подільником ПЧК поділяється на 9,
КвГ – кварцевий генератор; ГЗЧ – генератор змінної частоти; ППЧ – підсилювач проміжної частоти; Мд – модулятор–змішувач; ФНЧ – фільтр низької частоти; ВихП – вихідний підсилювач; ПНі...ПН3 – подільники частоти; S1... S4 – ключi; ПЧК – подільник частоти кварцового генератора
Р ис.
5.13. Структурна схема синтезатора частот
ис.
5.13. Структурна схема синтезатора частот
fкв=5000:9=555,(5) кГц. До кожного з подільників частоти подається напруга від кварцевого генератора. Смуга пропускання вибіркових підсилювачів після кожного з подільників частоти кварцового генератора ПЧ3... ПЧ1 звужується подекадно від 100 кГц до 1 кГц. Сумарна частота в модуляторі Мд змішується із частотою кварцового генератора fкв. З допомогою фільтра низької частоти ФНЧ виділяється різницева складова частоти вхідних сигналів. Значення частоти f вихідної напруги встановлюється регулюванням конденсатора змінної ємності в генераторі звукової частоти і визначається виразом
 (5.17)
(5.17)
де m – порядковий номер подільника частоти; n – коефіцієнт поділу подільника частоти ПЧК кварцевого генератора; k - коефіцієнт поділу подільників частоти; F – частоти ГЗЧ.
Для частотного діапазону 20 Гц ... 100 кГц, потрібно чотири піддіапазони, тобто крім ГЗЧ необхідно використати ще три подільники. Якщо вибрати fкв=5 МГц, fГЗЧ=(445...545) кГц, то в результаті рішення рівняння (5.17) отримуємо значенняk=10 і n=9.
Нестабільність вихідної частоти визначається за співвідношенням
 (5.18)
(5.18)
де
![]() ,
,
![]() ,
,
![]() - абсолютні зміни відповідно вихідної
частоти, кварцового генератора, частоти
ГЗЧ.
- абсолютні зміни відповідно вихідної
частоти, кварцового генератора, частоти
ГЗЧ.
Отже, нестабільність
вихідної частоти генератора зменшується
настільки, наскільки частота кварцевого
генератора
![]() більша від частоти F
генератора низької частоти ГЗЧ.
більша від частоти F
генератора низької частоти ГЗЧ.