

4.4. Корекція випадкових похибок в підсилювачах з періодичною корекцією дрейфу
Дещо простішими є підсилювачі з періодичною корекцією дрейфу (ПКД). Найпростіший варіант такого підсилювача зображений на рис.4.6.
Рис.
4.6. Структурна схема підсилювача з
періодичною корекцією дрейфу
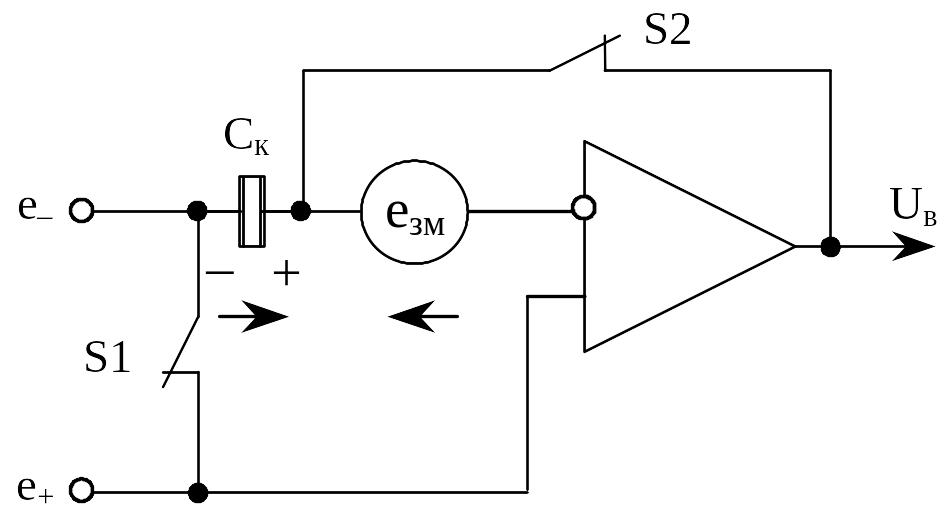
Напруга зміщення підсилювача в даний момент часу запам’ятовується конденсатором Ск. Якщо коефіцієнт передачі розімкненого підсилювача К>>1, то конденсатор Ск заряджається до значення Uк
![]() , (4.7)
, (4.7)
де езм – напруга зміщення підсилювача.
Недоліком підсилювача з ПКД є “провали” в передачі вхідного сигналу. Принцип корекції шумів пояснюється рис.4.7 (на верхній епюрі зображена спектральна густина вхідного шуму, на середній квадрат модуля АЧХ і на нижній – скореговане значення шуму на виході).
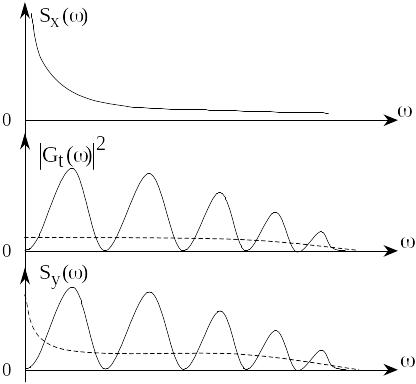
Рис. 4.7. Принцип корекції шумів в підсилювачах з періодичною корекцією дрейфу
Дисперсію шуму на виході підсилювача з ПКД можна визначити за формулами:
 , (4.8)
, (4.8)
 , (4.9)
, (4.9)
де t – час після проведення корекції; Тв – верхня гранична частота смуги пропускання підсилювача.
Як видно з формул (4.8), (4.9) для зменшення шумів потрібно зменшувати смугу пропускання, а для зменшення флікер-шуму, крім того, потрібно відносно часто проводити корекцію.
Вплив комутаційних викидів ключів модулятора аналогічний до МДМ-підсилювачів. Якщо МДМ-підсилювачі в основному використовуються для побудови підсилювачів як функціонально завершених вузлів (ПУВС, інтегральних підсилювачів, гібридних), то підсилювачі з ПКД (вірніше, принцип автоматичної періодичної корекції) використовується для побудови дещо складніших пристроїв, наприклад, для корекції адитивної складової похибки АЦП двотактного інтегрування.
4.5. Широкосмугові двоканальні підсилювачі
На основі розглянутих принципів побудови можуть бути реалізовані вимірювальні підсилювачі з відносно вузькою смугою пропускання. Для розширення смуги пропускання використовуються двоканальні підсилювачі. На рис. 4.8 показана структура Бакерфільда, в якій коефіцієнти передачі
ПВЧ - підсилювач високої частоти; ПНЧ - підсилювач низької частоти; ПШП - широкосмуговий підсилювач
Р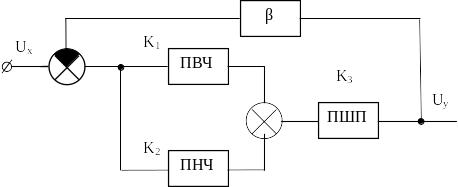 ис.
4.8. Структурна схема двоканального
підсилювача
ис.
4.8. Структурна схема двоканального
підсилювача
високо- та низькочастотного підсилювачів приблизно одинакові К1≈К2 (ПШП - широкосмуговий підсилювач). Під час практичної реалізації це може суттєво ускладнювати структуру підсилювача, оскільки амплітудно-частотна характеристика спадає із зростанням частоти і , тому, така структура має переважно тільки теоретичну цінність.
На відміну від цього в структурі Гольдберга (рис. 4.9) коефіцієнти передачі низько- та високочастотного каналів приблизно рівні одиниці, завдяки використанню пасивних розділювальних RC-фільтрів низької та високої частот, що суттєво спрощує підсилювач і, тому, на практиці така структура набагато частіше використовується.
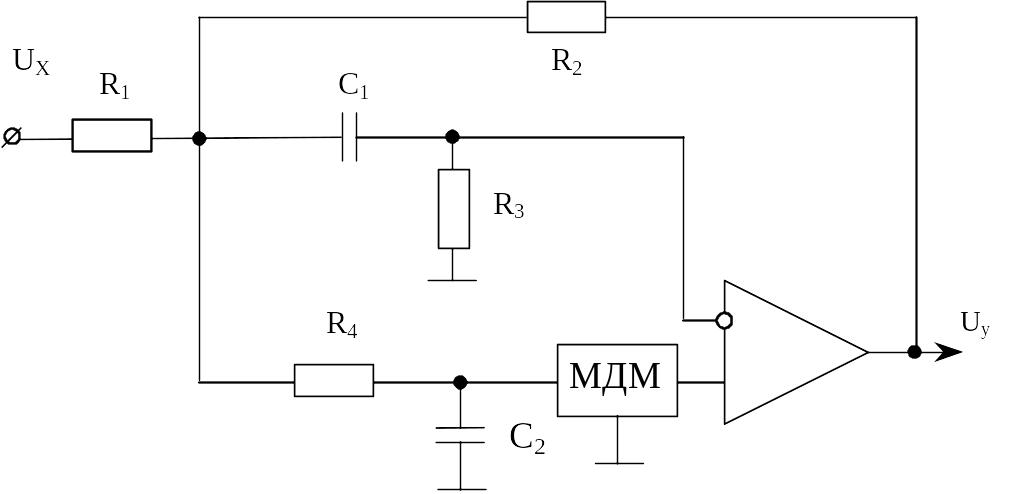
Рис. 4.9. Структурна схема двоканального підсилювача Гольдберга
4.6. Пристрої гальванічного розділення
З метою забезпечення високої завадостійкості до завад спільного виду, особливо у випадках, коли їх амплітуда набагато перевищує корисний сигнал (значення завад може сягати сотні Вольт, а корисного сигналу – десятки мілівольт, наприклад, контроль температури у металургійному виробництві) та безпечності в експлуатації (захист здоров’я обслуговувального персоналу, зменшення екологічних ризиків, безпечності експлуатації відносно дорогої вторинної апаратури в можливих аварійних режимах роботи, наприклад, на нафто-, газоперероблювальних та хімічних підприємствах, на атомних електростанціях) в ЗВТ використовується гальванічне розділення. При цьому пристрої гальванічного розділення вбудовують в кола передавання вимірювальних сигналів, в т.ч. і зворотного зв’язку, та кола живлення вхідних та вихідних блоків перетворення та підсилення.
Якість гальванічного розділення і визначатиме потрібний коефіцієнт послаблення завад, тому до них ставляться такі вимоги: великий опір ізоляції, мала прохідна ємність, відносно точний і стабільний коефіцієнт передачі, електрична міцність. Найчастіше для гальванічного розділення використовуються трансформатори, комутовані конденсатори, оптрони. Для суттєвого зменшення прохідної ємності застосовують просторове рознесення вхідних та вихідних обмоток трансформатора. На вхідну обмотку подають через трансформаторний модулятор напругу постійного струму і, відповідно, з вихідної обмотки трансформатора через демодулятор сигнал подають на вихідний підсилювач перетворювача з уніфікованим вихідним сигналом (ПУВС) (рис. 4.10). Трансформаторні пристрої гальванічного розділення (рис. 4.10) відповідають всім поставленим вимогам. У випадках, коли амплітуда
Р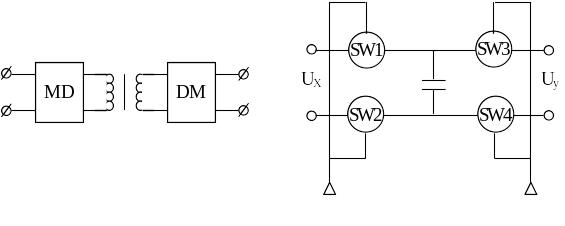 ис.
4.10 - Пристрої гальванічного розділення
ис.
4.10 - Пристрої гальванічного розділення
завади спільного виду не може перевищувати 20…30 В, то доцільно використовувати простіший пристрій гальванічного розділення з “плаваючим” конденсатором (рис. 4.10). В цьому пристрої пари ключів SW1, SW2 та SW3, SW4 знаходяться в замкненому стані почергово, коли замкнені ключі SW1, SW2 і розімкнені ключі SW3, SW4, конденсатор С заряджається до значення вхідного сигналу, в наступний проміжок часу SW1, SW2 розімкнені, а SW3, SW4 замкнені і заряджений конденсатор С підключається до вихідного підсилювача.
Оптронні пристрої гальванічного розділення на сучасному етапі практично не використовуються через дуже малий та нестабільний коефіцієнт передачі аналогових сигналів (£0,03). Завдяки іншим суттєвим перевагам ці пристрої гальванічного розділення є перспективними і очікується суттєве покращення його параметрів найближчим часом.
Крім гальванічного розділення вхідних кіл від вихідного кола в ПУВС потрібно відділити і кола живлення вхідних і вихідних кіл. Для цього використовуються магнітотранзисторні перетворювачі (генератори Роера), від окремих груп обмоток яких живляться вхідне і вихідне кола.
Висновки:
1. Дисперсія результату вимірювання у загальному випадку визначається внутрішніми завадами, основними джерелами яких є термодинамічні шуми, рівноважні і нерівноважні 1/f шуми, дробові і вибухові шуми. При малих струмах, що протікають через компоненти, (у випадку вольтметрів) та малих нелінійностях компонентів (відсутності технологічних дефектів) впливом нерівноважних 1/f шумів можна знехтувати, а спектральну густину дробових шумів враховувати подібно до спектральної густини термодинамічних шумів.
Отже, як показав проведений аналіз, переважаючими в сучасних компонентах ЗВТ є термодинамічні та рівноважні 1/f шуми.
2. Доведено, що дисперсію нескоригованого значення вхідного шуму можна визначати із врахуванням практичних обмежень – за нижнє значення смуги пропускання доцільно приймати частоту проведення операції встановлення нульового рівня ЗВТ, а за верхнє – максимальне значення смуги пропускання ЗВТ.
3. Показано, що нескориговане значення вхідного шуму при традиційному для більшості ЗВТ співвідношенні fвч>>fкл практично визначатиметься 1/f шумами.