

Часть 2. Принцип управления по отклонению Цель второй части работы:
1. Изучить принципиальную и структурную схемы автоматической системы регулирования уровня жидкости в баке, работающей по принципу отклонения.
2. Изучить методику расчёта АСР по отклонению с пропорциональным регулятором (П-регулятором).
3. Определить зависимость ошибки регулирования в статике от величины настроечного параметра П-регулятора.
4. Определить критические значения настроечного параметра П-регулятора, при которых: а) объект выходит на границу устойчивости, т.е. в режим периодических колебаний выходной величины; б) регулятор выходит в режим релейного регулирования типа "включено-выключено" или "открыто-закрыто".
5. Изучить особенности АСР по отклонению с пропорционально-интегральным регулятором (ПИ-регулятором). Освоить методику экспериментальной настройки таких систем управления из условия обеспечения: а) устойчивости; б) заданных показателей качества регулирования.
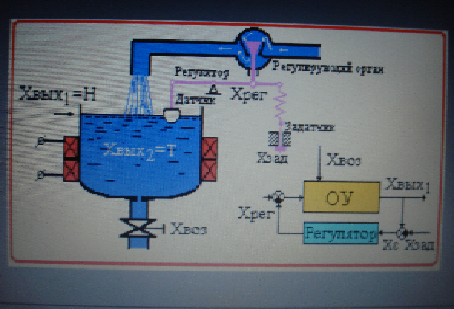
Структурная схема аср по отклонению

ОУ – объект управления, СУ – система управления, Хвых – регулируемая или выходная величина объекта управления, Хвоз – возмущающее воздействие, Хрег – регулирующее воздействие; цель управления – поддержание выходного параметра объекта Хвых на постоянном заданном значении Хзад, т.е. поддержание режима Хвых= Хзад.
Пропорциональный регулятор (П-регулятор).\
Таблица 3
Xвых=50,00
S1 |
Xвых |
Δхвых |
1 |
64,63 |
14,63 |
2 |
58,21 |
8,21 |
3 |
55,72 |
5,72 |
4 |
54,39 |
4,39 |
5 |
53,56 |
3,56 |
6 |
52,99 |
2.99 |
7 |
Медленно затухающие колебания |
|
7,5 |
1-я критическая точка колебания не затухают |
|
8 и далее |
Регулирование не возможно, система идет в ‘разнос’ |
|
Статическую ошибку в АСР с П-регуляторм можно уменьшать, увеличивая настроечный параметр регулятора S1, но делать это бесконтрольно нельзя, т.к. при слишком интенсивном регулирующем воздействии при S1=7, система теряет устойчивость. Вместо возврата регулируемого параметра к заданному значению будет наблюдать "раскачка" уровня, т.е. его постепенное увеличение и выход в режим периодических колебаний
Вывод: У принципа регулирования по отклонению существуют свои плюсы и минусы.
Преимущества:
1. Такой системе не важно, сколько возмущений действует на объект управления, все ли возмущения мы знаем заранее (или возможны возмущения, которые проявятся в процессе работы объекта управления), какое возмущение подействовало на объект в данный момент времени и начинает вызывать отклонение выходного параметра от заданного значения, поскольку сам факт появления отклонения уже достаточен для того, чтобы система регулирования заработала и начала устранять появившееся отклонение.
2. Такая система
не так критично относится к стабильности
параметров во времени (как система
регулирования по возмущению). Любая
нестабильность параметров приведёт к
нарушению заданного статического режима
Хвых=Хзад,
т.е. к появлению отклонения
Хвых![]() 0,
которое АСР по отклонения начнёт
ликвидировать (не разбираясь в причинах
появившегося отклонения).
0,
которое АСР по отклонения начнёт
ликвидировать (не разбираясь в причинах
появившегося отклонения).
Недостаток такого принципа регулирования (управления) состоит в том, что здесь даже теоретически невозможно обеспечить инвариантность выходной величины по отношению к возмущению, так как в АСР по отклонению отклонение сначала должно появиться, а затем уже система его будет убирать.
Значит, рассчитывать такие системы надо так:
а) чтобы они обладали высокой чувствительностью, т.е. не допускали больших отклонений Хвых от Хзад, а чувствовали и начинали реагировать уже на небольшие отклонения (которые ещё не вызывают серьёзных нарушений технологического режима объекта управления);
б) чтобы они ликвидировали эти отклонения как можно быстрее (т.е. как можно быстрее возвращали бы объект управления в заданный технологический режим).


