

Министерство образования и науки Российской Федерации
Федеральное бюджетное образовательное учреждение высшего профессионального образования
«Ярославский государственный технический университет»
Кафедра «кибернетики»
Отчёт защищён с оценкой_____________
Преподаватель:
Василькова Н.Н.
Изучение принципов управления по отклонению и возмущению
Лабораторная работа по дисциплине
“Теория автоматического управления”
ЯГТУ.220200.65 – 11 ЛР
Отчёт выполнили
студенты гр. МА-33:
Баталин А.В.
Жуков И.С.
Ярославль, 2012
Изучение принципов управления по возмущению и по отклонению
Часть 1. Принцип управления по возмущению
Цель первой части работы:
1. Изучить принципиальную и структурную схемы автоматической системы регулирования уровня жидкости в баке, работающей по принципу возмущения.
2. Изучить методику расчёта настроечного коэффициента компенсирующего устройства из условия обеспечения инвариантности выходной величины объекта управления по отношению к возмущению.
3. Освоить методику экспериментальной настройки таких систем управления.
4. Сопоставить результаты теоретического расчёта и экспериментальной настройки АСР по возмущению по величине настроечного коэффициента компенсирующего устройства, обеспечивающего инвариантность (с погрешностью, заданной преподавателем).
5. Объяснить причины возможного расхождения результатов расчёта и эксперимента.
6. Определить границы справедливости принципа инвариантности по величине возмущающих воздействий (положительных и отрицательных).
Исходные параметры объекта регулирования:
Сечение бака: S=0,47.
Коэффициент расхода: a=0,033.
Значение параметров в исходном статическом режиме:
хвых=хзад=50 %
хрег=48%
хвоз=30%
Кв=-4,8
Кр=3,3
Исследование аср по возмущению.
Цель первого этапа: вывести объект на заданный статический уровень, вычислить значение коэффициента передачи компенсирующего устройства Кку, снять несколько переходных процессов в системе и т.д.
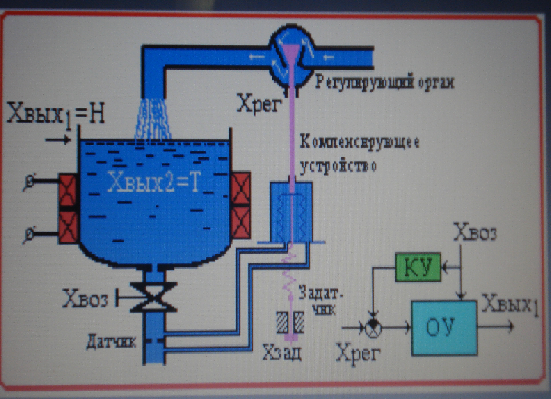
Схема САУ
Структурная схема аср по возмущению
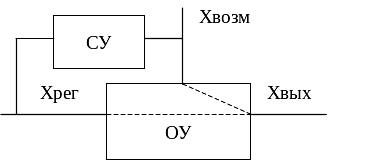
ОУ – объект управления, СУ – система управления, Хвых – регулируемая или выходная величина объекта управления, Хвоз – возмущающее воздействие, Хрег – регулирующее воздействие; цель управления – поддержание выходного параметра объекта Хвых на постоянном заданном значении Хзад, т.е. поддержание режима Хвых= Хзад.
При регулировании по возмущению, формирование регулирующего (компенсирующего) воздействия Хрег происходит на основании информации об измеренном значении возмущающего воздействия Хвоз. Так как выходная величина не контролируется (регулирующее воздействие вырабатывается не на основании ее значения), то в такой схеме регулирования необходимо учитывать все возмущения на объект регулирования.
Реализовать такую систему управления можно, измеряя возмущающее воздействие – расход на выходе бака, на основании которого будет формироваться компенсирующее воздействие, которое меняет положение регулирующего органа в исполнительном устройстве, выдерживая таким образом технологический режим.
1. Расчет коэффициента усиления компенсирующего устройства.
![]() Хвых
=Кр
Хрег
+Кв
Хвоз,
Хвых
=Кр
Хрег
+Кв
Хвоз,
Хвых =Кр Кку Хвоз +Кв Хвоз
Хвых =(Кр Кку+Кв) Хвоз
Для функционирования объекта управления в заданном режиме необходимо что бы ΔХвых и ΔХвоз были инвариантны, т.е. при различных значениях ΔХвоз значения ΔХрег=0.
(Кр Кку+Кв)=0,
Кку= - Кв/ Кр
Кку = 1,9/ 1,2=1,58(из лаб. работы №1)
Снимем переходные характеристики объекта установив рассчитанный коэффициент усиления компенсирующего устройства и подав единичное ступенчатое воздействие по каналу возмущения.
Таблица 1
При ΔХвоз=+10%
Кку |
хвых |
Δхвых |
1,45 |
48,32 |
1,68(не подходит) |
1,5 |
49,11 |
0,89(не подходит) |
1,55 |
49,91 |
0,09(подходит) |
1,555 |
49,99 |
0,01(подходит) |
1,5555 |
50,00 |
0(подходит) |
При ΔХвоз=-10%
Кку |
хвых |
Δхвых |
1,5555 |
50,00 |
0(подходит) |
Расчетный коэффициент передачи компенсирующего устройства Кку не обеспечивает полной компенсации возмущения в режимах, отличных от заданного по ряду причин. Основной причиной является то, что расчет коэффициентов производился на конкретном ограниченном линейном участке нелинейной характеристики, вторая не менее важная причина связана с тем, что мы пользуемся виртуальным объектом, процесс в котором смоделирован в виде формул.
2. Настройка коэффициента усиления компенсирующего устройства.
Настроим коэффициент
усиления компенсирующего устройства
таким образом, что бы при возмущающем
воздействии в пределах ±10% выходная
величина изменялась не более чем на
0,5% . С найденным на первом этапе работы
значением Кку,
изменяя поочерёдно возмущение сначала
в положительную сторону, затем в
отрицательную с каким-то шагом (например,
с шагом
![]() 2%),
найти такие значения возмущений +
Хвоз=…
и -
Хвоз=…,
при которых перестаёт выполняться
принцип инвариантности, т.е. ошибка
регулирования становится больше величины
погрешности равной 0,25%.
2%),
найти такие значения возмущений +
Хвоз=…
и -
Хвоз=…,
при которых перестаёт выполняться
принцип инвариантности, т.е. ошибка
регулирования становится больше величины
погрешности равной 0,25%.
Значение коэффициента усиления компенсирующего устройства после настройки будет равно:
Таблица 2
Кку=1,5555
Значения возмущений |
хвых |
Δхвых |
+12 |
50,00 |
0 |
+14 |
50,00 |
|
+16 |
50,00 |
|
+18 |
50,00 |
|
+20 |
50,00 |
|
+22 |
50,00 |
|
+24 |
50,00 |
|
+26 |
50,00 |
|
+30 |
50,00 |
|
+32 |
50,00 |
|
+34 |
50,00 |
|
+36 |
47,44 |
2,56 |
Значения возмущений |
хвых |
Δхвых |
-12 |
50,01 |
0,01 |
-14 |
50,01 |
0,01 |
-16 |
50,01 |
0,01 |
-18 |
50,01 |
0,01 |
-20 |
50,02 |
0,02 |
-22 |
50,02 |
0,02 |
-24 |
50,03 |
0,03 |
-26 |
50,04 |
0,04 |
-28 |
50,08 |
0,08 |
-30 |
50,20 |
0,2 |
При возмущении +26% происходит значительное уменьшение уровня, большее допустимого (т.е большее 0,25%). Это связано с тем, что при таком значении возмущения (увеличении расхода на стоке) на исполнительное устройство вырабатывается компенсирующее воздействие, которое перемещает регулирующий орган, устанавливая максимальное проходное сечение приточного трубопровода (исполнительное устройство открыто на 100%), но расхода на притоке не хватает для компенсации возмущения и восстановления уровня, вследствие чего, уровень падает до тех пор, пока система не придет в новое установившееся состояние.
Вывод:
В данной лабораторной работе, если теоретический расчёт АСР по возмущению из условия обеспечения инвариантности возможен, то на практическую реализацию таких систем накладывается очень много ограничений. Например:
Обычно возмущений много (а не одно, как показано на рис. 2). Значит, на каждое возмущение нужно ставить и рассчитывать подобную систему управления. Это сделает всю систему управления в целом более сложной и дорогой.
Не все возмущения можно выявить заранее на стадии проектирования системы управления объектом. Некоторые возмущения начинают проявляться только в процессе эксплуатации объекта, а т.к. на них не установлена система управления, которая компенсировала бы их влияние на объект, то такие возмущения вызовут отклонения Хвых от Хзад.
Чтобы система сохраняла инвариантность, все её параметры должны быть стабильными во времени, т.е. строго соответствовать расчётным значениям, полученным на стадии проектирования, чего на практике не может быть по причине естественного старения, износа элементов системы управления из-за таких явлений как трение, коррозия и прочих факторов.
Из-за указанных недостатков АСР, работающие по принципу возмущения, применяются редко, а входят в состав более сложных систем управления, работающих по комбинированному принципу.