

2. Синхронизирующая мощность.
Работа синхронной машины будет
устойчивой, если положительному
(отрицательному) приращению Δθ
соответствует положительное (отрицательное)
приращение электромагнитной мощности
ΔPэм, т. е. если![]() >
0. Отношение
>
0. Отношение![]() характеризует
степень нарастания электромагнитной
мощности при изменении угла θ. Точнее
эту степень можно характеризовать
первой производной от электромагнитной
мощности по углу θ, т. е. величиной,
Вт/рад,
характеризует
степень нарастания электромагнитной
мощности при изменении угла θ. Точнее
эту степень можно характеризовать
первой производной от электромагнитной
мощности по углу θ, т. е. величиной,
Вт/рад,
![]() .
(4-73)
.
(4-73)
Величину Рсбудем называть
удельной синхронизирующей мощностью.
Называют ее также коэффициентом
синхронизирующей мощности. Можно
допустить, что величинаPс=
![]() остается
постоянной в пределах небольших изменений
угла θ (на Δθ и
остается
постоянной в пределах небольших изменений
угла θ (на Δθ и![]() ),
с которыми обычно приходится иметь
дело. Тогда получим:
),
с которыми обычно приходится иметь
дело. Тогда получим:
![]() .
(4-74)
.
(4-74)
Вхождение машины в синхронизм зависит
от мощности ΔPэм,
замедляющей вращение ротора при θ + Δθ,
или мощности![]() ,
ускоряющей его вращение при θ - Δθ. Она,
очевидно, равна, если пренебречь потерями,
разности мощностей, отдаваемой в сеть
и на валу машины.
,
ускоряющей его вращение при θ - Δθ. Она,
очевидно, равна, если пренебречь потерями,
разности мощностей, отдаваемой в сеть
и на валу машины.
Величину ΔРэм(или![]() )
будем называть синхронизирующей
мощностью. Возникновение синхронизирующей
мощности при отклонении ротора от
синхронного хода обусловливает как бы
упругую, эластичную связь машины с
сетью.
)
будем называть синхронизирующей
мощностью. Возникновение синхронизирующей
мощности при отклонении ротора от
синхронного хода обусловливает как бы
упругую, эластичную связь машины с
сетью.
Зависимость Рсот угла θ
представлена пунктирной кривой нарис.
4-64. Она показывает, что при θ >
90° машина не может держаться в синхронизме.
Обычно машина работает далеко от предела
устойчивости. Угол θнпри номинальной
мощности редко превышает 20![]() 30°.
30°.
Согласно (4-71)Рэм.м зависит отUиЕ0. Следовательно, при уменьшении напряжения или возбуждения максимальная, мощность также уменьшается и машина будет работать ближе к пределу статической устойчивости.
3. Изменение возбуждения. V-oбразные кривые.
Рассмотрим параллельную работу генератора с сетью очень большой мощности при изменении тока в его обмотке возбуждения.
Допустим, что после включения генератора
на параллельную работу он работает
вхолостую и его э.д.с
![]() уравновешивает
напряжение сети
уравновешивает
напряжение сети![]() ;
тогда в его статорной обмотке не будет
никакого тока. Если теперь увеличить
ток в обмотке возбуждения (перевозбудить
машину), то напряжение сети
;
тогда в его статорной обмотке не будет
никакого тока. Если теперь увеличить
ток в обмотке возбуждения (перевозбудить
машину), то напряжение сети![]() не
будет уравновешивать э.д.с.
не
будет уравновешивать э.д.с.![]() ,
появится избыток э.д.с.
,
появится избыток э.д.с.![]() (рис.
4-65).
(рис.
4-65).
Избыточная э.д.с.
![]() вызовет
ток в обмотках всех параллельно работающих
машин. Его можно принять равным
вызовет
ток в обмотках всех параллельно работающих
машин. Его можно принять равным![]() ,
так как сопротивлением. Обмоток всех
других машин можно пренебречь, как и
активным сопротивлением рассматриваемой
машины. Угол θ при этом не изменится (θ
= 0).
,
так как сопротивлением. Обмоток всех
других машин можно пренебречь, как и
активным сопротивлением рассматриваемой
машины. Угол θ при этом не изменится (θ
= 0).
Ток
![]() есть
реактивный ток. Он будет отставать от
есть
реактивный ток. Он будет отставать от![]() ,
а следовательно, и от напряжения
генератораUгна
,
а следовательно, и от напряжения
генератораUгна![]() ,
как это показано нарис.
4-65. Этот ток будет тем больше,
чем больше машина перевозбуждена и чем
меньше сопротивлениеxc.
,
как это показано нарис.
4-65. Этот ток будет тем больше,
чем больше машина перевозбуждена и чем
меньше сопротивлениеxc.

Рис. 4-65. Перевозбуждение машины.
При уменьшении тока возбуждения (при
недовозбуждении) напряжение сети
![]() будет
больше э.д.с. (рис.
4-66). Следовательно, в цепи обмоток
параллельно работающих машин будет
действовать э.д.с.
будет
больше э.д.с. (рис.
4-66). Следовательно, в цепи обмоток
параллельно работающих машин будет
действовать э.д.с.![]() ,
которая также создает реактивный ток
,
которая также создает реактивный ток![]() ,
но теперь этот ток будет опережать
напряжение генератора на
,
но теперь этот ток будет опережать
напряжение генератора на![]() ,
как показано нарис.
4-66.
,
как показано нарис.
4-66.

Рис. 4-66. Недовозбуждение машины.
К тому же самому мы придем, если учтем выводы, полученные нами из рассмотрения реакции якоря в синхронном генераторе (§ 4-3,а).
Так как результирующий поток в машине, как мы выяснили, при Uc=constдолжен быть постоянным, то при перевозбуждении реакция якоря должна быть размагничивающей. Такую реакцию якоря в генераторе создает отстающий ток. Следовательно, при перевозбуждении генератор работает с отстающим током.
При недовозбуждении для сохранения результирующего потока неизменным реакция якоря должна быть намагничивающей. А такую реакцию якоря создает опережающий ток. Следовательно, при недовозбуждении генератор работает с опережающим током.
То же самое будем иметь при изменении возбуждения генератора, работающего с нагрузкой.
На рис. 4-67представлена диаграмма генератора, работающего с различными токами иcosφ, но при постоянном напряжении и постоянной мощности, отдаваемой в сеть.

Рис. 4-67. Диаграммы генератора при различных возбуждениях (при U=constиР=const).
Рассмотрим сначала работу генератора
стоком Iиcosφ =l. Проекция![]() на
линию 0А, перпендикулярную к
на
линию 0А, перпендикулярную к![]() ,
равна
,
равна![]() .
Следовательно, эта проекция при постоянных
напряженииUи синхронном
сопротивлениихсможет служить
мерой мощности машины, равной
.
Следовательно, эта проекция при постоянных
напряженииUи синхронном
сопротивлениихсможет служить
мерой мощности машины, равной![]() .
.
Если при постоянной мощности (Р=Рэм=const) изменить
возбуждение, то изменится э.д.с.Е0,
но ее проекция на линию, перпендикулярную
кU, при этом должна
остаться неизменной. Таким образом, при
изменении возбуждения конец вектора
э.д.с.![]() будет
скользить по прямойАВ.
будет
скользить по прямойАВ.
Из рис.
4-67следует, что при перевозбуждении![]() генератор
работает с отстающим током, а при
недовозбуждении
генератор
работает с отстающим током, а при
недовозбуждении![]() )
— с опережающим током.
)
— с опережающим током.
Ток
![]() всегда
направлен под углом
всегда
направлен под углом![]() к
к![]() .
Конец вектора
.
Конец вектора![]() при
изменении возбуждения будет скользить
по прямойCD, так как
активная составляющая токаcosφ =const.
при
изменении возбуждения будет скользить
по прямойCD, так как
активная составляющая токаcosφ =const.
Переход от одного установившегося
режима к другому при изменении возбуждения
протекает следующим образом (рис.
4-67). Допустим, например, что
э.д.с.E0увеличивается до![]() .
Угол θ не может измениться столь же
быстро до θ' вследствие инерции вращающихся
частей. УвеличениеЕ0при том
же значении угла θ вызовет увеличение
электромагнитной мощности, которая в
течение некоторого промежутка времени
будет больше мощности на валу. Поэтому
ротор должен замедлить свое вращение.
Угол θ при этом должен уменьшаться.
После нескольких затухающих колебаний
получается установившийся режим работы
при новых значениях
.
Угол θ не может измениться столь же
быстро до θ' вследствие инерции вращающихся
частей. УвеличениеЕ0при том
же значении угла θ вызовет увеличение
электромагнитной мощности, которая в
течение некоторого промежутка времени
будет больше мощности на валу. Поэтому
ротор должен замедлить свое вращение.
Угол θ при этом должен уменьшаться.
После нескольких затухающих колебаний
получается установившийся режим работы
при новых значениях![]() и
θ', при которых электромагнитная мощность
снова соответствует мощности на валу.
и
θ', при которых электромагнитная мощность
снова соответствует мощности на валу.
В течение переходного процесса, связанного с небольшим изменением угловой частоты ротора, регуляторы частоты первичных двигателей обычно не успевают подействовать, так как их чувствительность относительно невелика.
Следовательно, изменение возбуждения вызовет лишь изменение реактивной составляющей тока.
Для изменения активной составляющей
тока или активной мощности, отдаваемой
в сеть, необходимо изменить мощность,
создаваемую первичным двигателем.
Например, для увеличения мощности с РдоР' нужно соответственно увеличить
мощность на валу машины. Тогда векторЕ0![]() при
изменении возбуждения будет скользить
по линииА'В' (рис.
4-67). ЛинииAВ,А'В', параллельные вектору
при
изменении возбуждения будет скользить
по линииА'В' (рис.
4-67). ЛинииAВ,А'В', параллельные вектору![]() ,
называются линиями постоянной мощности
синхронного генератора.
,
называются линиями постоянной мощности
синхронного генератора.
Опытным путем можно найти зависимости тока статора от тока возбуждения I=f(Iв) приU=constиР=const. Соответствующие кривые для различных значенийРпоказаны нарис. 4-68.

Рис. 4-68. V-образные кривые генератора.
Вследствие их сходства с латинской буквой Vони называютсяV-образными кривыми. Нарис. 4-68видно, что для каждой мощности существует такое возбуждение, при котором ток статора синхронного генератора будет минимальным. Этому току соответствуетcosφ =l. Нарис. 4-68кривая минимальных токов показана пунктиром. Она, очевидно, представляет собой регулировочную характеристику приcosφ =l.
V-образные кривые могут быть также найдены при помощи векторных диаграмм, для построения которых должны быть известны характеристика холостого хода и параметры машины.
4-7.3. Параллельная работа двух соизмеримых по мощности генераторов
Рассмотрим параллельную работу генераторов, имеющих одинаковые номинальные величины и одинаковые параметры. Будем считать, что их общая нагрузка определяется двумя векторами UиI, показанными нарис. 4-69.

Рис. 4-69. К параллельной работе генераторов одинаковой мощности (изменение возбуждения).
Допустим, что мощности, подведенные к генераторам со стороны их первичных двигателей, равны между собой и во время работы остаются постоянными и что общее напряжение Uтакже поддерживается постоянным.
Если э.д.с. первого и второго генераторов
равны друг другу:
![]() ,
то они будут работать с одинаковыми
токами
,
то они будут работать с одинаковыми
токами![]() и
и![]() .
При этом ихcosφ равны
между собой и в то же время равныcosφ общей нагрузки. Оба генератора,
следовательно, работают с одинаковыми
активной и реактивной мощностями.
.
При этом ихcosφ равны
между собой и в то же время равныcosφ общей нагрузки. Оба генератора,
следовательно, работают с одинаковыми
активной и реактивной мощностями.
Пусть теперь возбуждение первого
генератора стало больше, а второго
меньше. На рис.
4-69показано, что при этомcosφ генераторов изменятся, так же, как и
токи. Первый генератор, имеющий э.д.с.![]() будет
работать с низкимcosφ, а
второй генератор, имеющий э.д.с.
будет
работать с низкимcosφ, а
второй генератор, имеющий э.д.с.![]() ,
будет работать сcosφ = 1.
Следовательно, всю необходимую для
внешней сети реактивную мощность будет
вырабатывать только первый генератор
(
,
будет работать сcosφ = 1.
Следовательно, всю необходимую для
внешней сети реактивную мощность будет
вырабатывать только первый генератор
(![]() ).
).
При дальнейшем увеличении э.д.с. первого
генератора до
![]() и
уменьшении э.д.с. второго генератора до
и
уменьшении э.д.с. второго генератора до![]() токи
их будут
токи
их будут![]() и
и![]() .
В этом случаеcosφ первого
генератора станет еще меньше, тогда какcosφ второго генератора
будет соответствовать опережающему
току. Первый генератор будет доставлять
реактивный ток (или реактивную мощность)
не только сети, но и второму генератору,
работающему с недовозбуждением.
.
В этом случаеcosφ первого
генератора станет еще меньше, тогда какcosφ второго генератора
будет соответствовать опережающему
току. Первый генератор будет доставлять
реактивный ток (или реактивную мощность)
не только сети, но и второму генератору,
работающему с недовозбуждением.
Таким образом, улучшение cosφодного из генераторов влечет за собой ухудшениеcosφ другого генератора. Путем изменения возбуждения можно как угодно распределять реактивную мощность между параллельно работающими синхронными машинами.
Ранее было показано, что изменение возбуждения параллельно работающих генераторов влечет за собой изменение их реактивных токов, тогда как их активные токи остаются неизменными соответственно практически неизменным механическим мощностям первичных двигателей.
Для изменения нагрузки генератора, т. е. отдаваемой им активной мощности, необходимо воздействовать на первичный двигатель, чтобы создаваемый им вращающий момент, приложенный к валу генератора, изменился. Предположим, что мы увеличили момент на валу одного из генераторов; тогда ротор его забежит несколько вперед, угол θ возрастет и генератор будет работать с большей нагрузкой. Если при этом общая нагрузка сети остается постоянной и если необходимо иметь неизменной частоту тока, то увеличение нагрузки первого генератора должно сопровождаться одновременным уменьшением нагрузки второго генератора. Последнее достигается также путем соответствующего воздействия на его первичный двигатель.
Следовательно, для перевода нагрузки с одного генератора на другой необходимо мощность на валу одного генератора уменьшать, а на валу второго — увеличивать. Если при этом требуется сохранить прежнее напряжение, то нужно одновременно воздействовать и на возбуждение обоих генераторов.
Обратимся к рис. 4-70, который иллюстрирует процесс перевода нагрузки с одного генератора на другой.

Рис. 4-70. К параллельной работе генераторов одинаковой мощности (перевод нагрузки с одного генератора на другой).
Допустим, что вначале генераторы имеют
одинаковые э.д.с. и токи как активные,
так и реактивные (![]() ).
Увеличим вращающий момент на валу
первого генератора; тогда вектор
).
Увеличим вращающий момент на валу
первого генератора; тогда вектор![]() отклонится
несколько влево соответственно увеличению
угла θ1(точкаА). Вращающий
момент на валу второго генератора
уменьшим; тогда вектор э.д.с.
отклонится
несколько влево соответственно увеличению
угла θ1(точкаА). Вращающий
момент на валу второго генератора
уменьшим; тогда вектор э.д.с.![]() отклонится
вправо соответственно уменьшению угла
θ2(точкаВ). Далее нужно сделать
одинаковымиcosφгенераторов. Для этот необходимо
увеличить возбуждение первого генератора,
чтобы конец вектора э.д.с.
отклонится
вправо соответственно уменьшению угла
θ2(точкаВ). Далее нужно сделать
одинаковымиcosφгенераторов. Для этот необходимо
увеличить возбуждение первого генератора,
чтобы конец вектора э.д.с.![]() ,
переместился в точкуС, и уменьшить
возбуждение второго генератора, чтобы
конец вектора э.д.с.
,
переместился в точкуС, и уменьшить
возбуждение второго генератора, чтобы
конец вектора э.д.с.![]() переместился
в точкуD. При этом
переместился
в точкуD. При этом![]() будут
совпадать по фазе.
будут
совпадать по фазе.
Дальнейшее должно быть понятным из рис.
4-70. Зигзагообразная линия вверх
от![]() соответствует
движению вектора э.д.с. первого генератора.
Зигзагообразная линия вниз от
соответствует
движению вектора э.д.с. первого генератора.
Зигзагообразная линия вниз от![]() соответствует
движению вектора э.д.с. второго генератора.
При
соответствует
движению вектора э.д.с. второго генератора.
При![]() и
и![]() всю
нагрузку несет только первый генератор.
Напряжение при этом сохраняет свое
начальное значение. При
всю
нагрузку несет только первый генератор.
Напряжение при этом сохраняет свое
начальное значение. При![]() и
и![]() второй
генератор не несет никакой нагрузки,
ток в его статорной обмотке
второй
генератор не несет никакой нагрузки,
ток в его статорной обмотке![]() .
Следовательно, отключение второго
генератора от общих шин не вызовет
никаких нежелательных явлений, так как
при этом не будет резкого изменения
режима работы первого генератора.
.
Следовательно, отключение второго
генератора от общих шин не вызовет
никаких нежелательных явлений, так как
при этом не будет резкого изменения
режима работы первого генератора.
4-7.4. Электромагнитная и синхронизирующая мощности явнополюсной машины
В предыдущем при определении электромагнитной и синхронизирующей мощностей мы исходили из упрощенной диаграммы, не учитывающей ни насыщения машины, ни различия магнитных проводимостей по ее продольной и поперечной осям.
Найдем теперь выражения для РэмиPcявнополюсной машины с учетом различия ее параметров по продольной и поперечной осям. При этом будем также пренебрегать активным сопротивлением обмотки статора и насыщением магнитной цепи машины.
Обратимся к видоизмененной диаграмме явнополюсной машины, представленной на рис. 4-71.

Рис. 4-71. Видоизмененная диаграмма явнополюсной машины.
Из этой диаграммы имеем:
![]()
Имея в виду, что
![]() и
и![]() ,
,
из рис. 4-71найдем:
![]()
Подставляя найденные значения в уравнение для Рэм, после преобразований получим:
 (4-75)
(4-75)
Полученное выражение для электромагнитной мощности явнополюсной машины показывает, что эта мощность зависит не только от возбуждения, но и от различия хdиxq.
Из (4-75) следует, что явнополюсная машина может работать без возбуждения, т. е. приE0=0. В этом случае она называется реактивной машиной, работа которой будет рассмотрена в последующем (§ 4-10).
Разделив (4-75) на синхронную угловую скорость, получим уравнение для электромагнитного вращающего момента, развиваемого явнополюсной машиной:
 (4-76)
(4-76)
Второй член правой части этого уравнения равен так называемому реактивному моменту:
 (4-77)
(4-77)
Равенства (4-75) и (4-76), очевидно, применимы и для неявнополюсной машины. Для этой машиныxqможно считать равнымxd , поэтому равенство (4-75) будет точно такое же,
![]() ,
(4-78)
,
(4-78)
как и ранее полученное равенство (4-69), гдехc=хd.
В соответствии с (4-75) нарис. 4-72построена кривая, выражающая зависимостьРэмот угла θ, т. е. угловая характеристика явнополюсного генератора.

Рис. 4-72. Угловая характеристика явнополюсной машины.
Продифференцировав равенство (4-75) по углу θ, получим выражение для удельной синхронизирующей мощности явнополюсной машины:
![]() .
(4-79)
.
(4-79)
Кривая Pc=f(θ) также показана нарис. 4-72.
По предложению проф. Г.Н. Петрова угловую характеристику и максимальную электромагнитную мощность Рэмможно определить с учетом насыщения и активного сопротивления обмотки якоря следующим образом: надо построить несколько регулировочных характеристикIв=f(I) приU=constиcosφ =constдля различныхcosφ и кривые θ =f(I) при тех же условиях; затем соответственно номинальному току возбужденияIв.н=constпровести линию, параллельную оси абсцисс; тогда точки пересечения этой линии с указанными кривыми дают величины, необходимые для построения угловой характеристики (регулировочные характеристики и кривые θ =f(I) для различныхcosφ должны быть построены при помощи векторных диаграмм и характеристики холостого хода).
4-7.5. Статическая перегружаемость синхронной машины
Статическая перегружаемость Sсинхронной машины, так же как и предел ее статической устойчивости, определяется отношением
![]() .
(4-80)
.
(4-80)
Это отношение представляет собой долевое значение максимальной электромагнитной мощности при UниIв.н, которое для неявнополюсной машины можно выразить при помощи равенства (4-78) следующим образом:
![]()
 ,
(4-81)
,
(4-81)
где![]() и
и![]() —
кратность тока короткого замыкания при
номинальном возбуждении (
—
кратность тока короткого замыкания при
номинальном возбуждении (![]() —
э.д.с. по спрямленной характеристике
холостого хода приIв.н)
или
—
э.д.с. по спрямленной характеристике
холостого хода приIв.н)
или
![]() , (4-82)
, (4-82)
где ОКЗ=fк0— кратность тока короткого замыкания при возбуждении холостого хода (см.§ 4-3,а). (Согласно ГОСТ 533-51 на “Генераторы электрические паротурбинные двухполюсные (турбогенераторы)"Sне должна быть ниже 1,7.)
Полученное выражение, которое обычно используется при практических расчетах, является приближенным, потому что оно было выведено без учета активного сопротивления обмотки статора и насыщения магнитной цепи машины.
Активным сопротивлением обмотки статора
в обычных случаях можно пренебречь, так
как оно оказывает ничтожное влияние на
Pэм.м. Насыщение
магнитной цепи в небольшой степени
влияет наPэм.м,
повышая его значение на несколько
процентов и увеличивая угол θ,
соответствующийРэм.мдо 100![]() 110°.
110°.
Если не учитывать насыщения, то Рэм.мявнополюсной машины, как следует изрис. 4-72, получается приθм< 90°. Значениеθмнайдем, приравняв нулю первую производную отРэмпо θ, т. е. приравняв нулюPс.
Введем обозначения:
![]() .
.
Тогда получим из (4-79):
![]() ,
,
откуда
![]() .
(4-83)
.
(4-83)
Подставляя в (4-75) полученное значениеθм, найдемРэм.м, а следовательно, согласно (4-80) статическую перегружаемостьS.
Статическая перегружаемость Sсинхронной машины, так же как и предел ее статической устойчивости, определяется отношением
![]() .
(4-80)
.
(4-80)
Это отношение представляет собой долевое значение максимальной электромагнитной мощности при UниIв.н, которое для неявнополюсной машины можно выразить при помощи равенства (4-78) следующим образом:
![]()
 ,
(4-81)
,
(4-81)
где![]() и
и![]() —
кратность тока короткого замыкания при
номинальном возбуждении (
—
кратность тока короткого замыкания при
номинальном возбуждении (![]() —
э.д.с. по спрямленной характеристике
холостого хода приIв.н)
или
—
э.д.с. по спрямленной характеристике
холостого хода приIв.н)
или
![]() , (4-82)
, (4-82)
где ОКЗ=fк0— кратность тока короткого замыкания при возбуждении холостого хода (см.§ 4-3,а). (Согласно ГОСТ 533-51 на “Генераторы электрические паротурбинные двухполюсные (турбогенераторы)"Sне должна быть ниже 1,7.)
Полученное выражение, которое обычно используется при практических расчетах, является приближенным, потому что оно было выведено без учета активного сопротивления обмотки статора и насыщения магнитной цепи машины.
Активным сопротивлением обмотки статора
в обычных случаях можно пренебречь, так
как оно оказывает ничтожное влияние на
Pэм.м. Насыщение
магнитной цепи в небольшой степени
влияет наPэм.м,
повышая его значение на несколько
процентов и увеличивая угол θ,
соответствующийРэм.мдо 100![]() 110°.
110°.
Если не учитывать насыщения, то Рэм.мявнополюсной машины, как следует изрис. 4-72, получается приθм< 90°. Значениеθмнайдем, приравняв нулю первую производную отРэмпо θ, т. е. приравняв нулюPс.
Введем обозначения:
![]() .
.
Тогда получим из (4-79):
![]() ,
,
откуда
![]() .
(4-83)
.
(4-83)
Подставляя в (4-75) полученное значениеθм, найдемРэм.м, а следовательно, согласно (4-80) статическую перегружаемостьS.
Статическая перегружаемость Sсинхронной машины, так же как и предел ее статической устойчивости, определяется отношением
![]() .
(4-80)
.
(4-80)
Это отношение представляет собой долевое значение максимальной электромагнитной мощности при UниIв.н, которое для неявнополюсной машины можно выразить при помощи равенства (4-78) следующим образом:
![]()
 ,
(4-81)
,
(4-81)
где![]() и
и![]() —
кратность тока короткого замыкания при
номинальном возбуждении (
—
кратность тока короткого замыкания при
номинальном возбуждении (![]() —
э.д.с. по спрямленной характеристике
холостого хода приIв.н)
или
—
э.д.с. по спрямленной характеристике
холостого хода приIв.н)
или
![]() , (4-82)
, (4-82)
где ОКЗ=fк0— кратность тока короткого замыкания при возбуждении холостого хода (см.§ 4-3,а). (Согласно ГОСТ 533-51 на “Генераторы электрические паротурбинные двухполюсные (турбогенераторы)"Sне должна быть ниже 1,7.)
Полученное выражение, которое обычно используется при практических расчетах, является приближенным, потому что оно было выведено без учета активного сопротивления обмотки статора и насыщения магнитной цепи машины.
Активным сопротивлением обмотки статора
в обычных случаях можно пренебречь, так
как оно оказывает ничтожное влияние на
Pэм.м. Насыщение
магнитной цепи в небольшой степени
влияет наPэм.м,
повышая его значение на несколько
процентов и увеличивая угол θ,
соответствующийРэм.мдо 100![]() 110°.
110°.
Если не учитывать насыщения, то Рэм.мявнополюсной машины, как следует изрис. 4-72, получается приθм< 90°. Значениеθмнайдем, приравняв нулю первую производную отРэмпо θ, т. е. приравняв нулюPс.
Введем обозначения:
![]() .
.
Тогда получим из (4-79):
![]() ,
,
откуда
![]() .
(4-83)
.
(4-83)
Подставляя в (4-75) полученное значениеθм, найдемРэм.м, а следовательно, согласно (4-80) статическую перегружаемостьS.
4-8. Синхронный двигатель
а) Переход машины от работы генератором к работе двигателем.
Если мощность на валу синхронной машины, работающей генератором параллельна с другими синхронными машинами, уменьшать, то угол θ будет также уменьшаться. При мощности на валу, равной нулю, угол θ также равен нулю (если пренебречь потерями в машине). В этом случае э.д.с. машины прямо противоположна напряжению сети.
Если создать на валу машины тормозящий
момент, то вектор э.д.с.
![]() будет
отставать от вектора напряжения
будет
отставать от вектора напряжения![]() .
Будем в этом случае считать угол θ
отрицательным. Нарис.
4-73показана векторная диаграмма
машины при работе генератором, а нарис.
4-74при работе двигателем.
.
Будем в этом случае считать угол θ
отрицательным. Нарис.
4-73показана векторная диаграмма
машины при работе генератором, а нарис.
4-74при работе двигателем.

Рис. 4-73. Диаграмма генератора.

Рис. 4-74. Диаграмма двигателя.
Из рис.
4-73и4-74следует, что при переходе машины от
работы генератором к работе двигателем
фаза тока изменяется почти на 180° в
соответствии с изменением результирующего
напряжения![]() ,
действующего в цепи машины. Мощность,
отдаваемая в сеть при работе машины
двигателем, будет отрицательной:
,
действующего в цепи машины. Мощность,
отдаваемая в сеть при работе машины
двигателем, будет отрицательной:![]() ,
а мощность, потребляемая из сети, —
положительной:
,
а мощность, потребляемая из сети, —
положительной:![]() .
.
Синхронная машина при работе двигателем будет, так же как и при работе генератором, держаться в синхронизме. Зависимость между мощностью двигателя и углом θ, как показано в дальнейшем, не отличается, если пренебречь потерями, от той же зависимости для генератора.
б) Векторные диаграммы синхронного двигателя.
Векторные диаграммы двигателя аналогичны векторным диаграммам генератора.
Диаграммы приходится строить при определении н.с. Fв(или токаIв) обмотки возбуждения двигателя, работающего при заданных напряжении сетиUс, токеIиcosφ. В этом случае при построении диаграмм, так же как и для генератора, должны быть известны параметры, характеристика холостого хода и обмоточные данные машины.
Диаграммы двигателя используются также при исследовании его рабочих свойств.
В зависимости от типа конструкции ротора двигателя обращаются к диаграммам или явнополюсной, или неявнополюсной машины. Для приближенного исследования можно также использовать упрощенные диаграммы.
На рис. 4-75представлена диаграмма явнополюсного синхронного двигателя, работающего с опережающим током. Здесь фаза тока определяется относительно фазы напряжения сети.
.
Рис. 4-75. Диаграмма явнополюсного двигателя, работающего с опережающим током.
Справа на рис. 4-75показаны векторы составляющих приложенного к двигателю напряжения, компенсирующих падения напряжения или уравновешивающих соответствующие э.д.с. в обмотке статора; слева показаны векторы этих э.д.с. Их построение производится так же, как для генератора, и должно быть понятно без особых пояснений. При практическом построении диаграммы ограничиваются построением лишь правой ее части. Нарис. 4-76представлена диаграмма явнополюсного двигателя, работающего с отстающим током. В этой диаграмме, как и в дальнейших, индекссу вектора напряжения опущен.

Рис. 4-76. Диаграмма явнополюсного двигателя, работающего с отстающим током.
На рис.
4-75и4-76видно, что реакция в синхронном двигателе
при опережающем токе является
размагничивающей (![]() направлена
против
направлена
против![]() и
соответственно
и
соответственно![]() против
против![]() ),
а при отстающем токе — намагничивающей
(
),
а при отстающем токе — намагничивающей
(![]() совпадает
по направлению с
совпадает
по направлению с![]() ,
как и
,
как и![]() с
с![]() ).
).
Это не противоречит выводам, полученным
при рассмотрении реакции якоря генератора
(см. §
4-3,а).
Действительно, нарис.
4-75видно, что синхронный
двигатель, работающий с опережающим
током, имеет продольную составляющую
тока![]() ,
отстающую от э.д.с.
,
отстающую от э.д.с.![]() ,
что соответствует работе генератора с
отстающим током. Изрис.
4-76вытекает, что работа двигателя
с отстающим током соответствует работе
генератора с опережающим током, так как
в обоих случаях вектор
,
что соответствует работе генератора с
отстающим током. Изрис.
4-76вытекает, что работа двигателя
с отстающим током соответствует работе
генератора с опережающим током, так как
в обоих случаях вектор![]() будет
опережающим по отношению к вектору
будет
опережающим по отношению к вектору![]() .
.
Мы здесь не будем приводить диаграммы неявнополюсного двигателя. Их построение производится в том же порядке, что и для неявнополюсного генератора.
в) Электромагнитная и синхронизирующая мощности синхронного двигателя.
Под электромагнитной мощностью синхронного двигателя понимается мощность, которая передается вращающимся нолем со статора ротору. Она преобразуется в механическую мощность, развиваемую ротором. Часть этой мощности расходуется на покрытие механических потерь, добавочных потерь в стали и на возбуждение, если возбудитель приводится во вращение синхронным двигателем. Остальная часть механической мощности, развиваемой ротором, является полезной мощностью на валу двигателя.
Уравнения для электромагнитной и синхронизирующей мощностей можно получить при помощи упрощенной диаграммы синхронного двигателя, представленной на рис. 4-77.

Рис. 4-77. Диаграмма двигателя, работающего с отстающим током (к выводу уравнения для электромагнитной мощности).
Они будут такие же, как соответствующие уравнения для генератора (4-69) и (4-73). Очевидно, что уравнения дляPэмиРсявнополюсного двигателя не будут отличаться от уравнений (4-75) и (4-79) явнополюсного генератора.
Из рис. 4-77следует, что пространственный вектор н.с.Fpпри работе машины двигателем опережает векторFв, тогда как при работе машины генератором имеет место обратное явление (рис. 4-63). Напомним, что в двигателе электромагнитный вращающий момент направлен в сторону вращения ротора, тогда как в генераторе против вращения ротора. Будем считать в выражениях для мощностей угол θ при работе генератором положительным, а при работе двигателем отрицательным.
Мерой способности двигателя сохранять синхронизм при той или другой нагрузке, так же как и для генератора, может служить первая производная от электромагнитной мощности по углу θ, т. е. величина Рс[(4-73) или (4-79)].
На рис.
4-78представлены зависимости
электромагнитного момента![]() и
удельного синхронизирующего момента
и
удельного синхронизирующего момента![]() от
угла θ.
от
угла θ.

Рис. 4-78. Зависимости Мэм и Мcот угла θ.
Жирно начерченная часть кривой Мэм=f(θ) соответствует области устойчивой работы синхронной машины при малых возмущениях, так как при изменении углаθот -90° до +900удельный синхронизирующий моментМссохраняет положительное значение.
Максимальный электромагнитный момент
![]() (4-84)
(4-84)
определяет предел статической устойчивости синхронного двигателя, т. е. его способности держаться в синхронизме при малых возмущениях режима работы.
При определении Мэм.мпо (4-84) э.д.с.E0надо брать по спрямленной характеристике холостого хода для данного тока возбужденияIв,хс=хd— ненасыщенное значение. Для нормальных синхронных двигателей приIвниUн
![]() .
.
г) V-образные кривые синхронного двигателя.
Под V-образными кривыми синхронного двигателя понимаются кривые, выражающие зависимость тока статора от тока возбуждения при постоянной мощности на валу и при постоянном напряжении на зажимах.
Эти кривые можно получить из упрощенной диаграммы, пренебрегая потерями в активном сопротивлении обмотки статора, магнитными и механическими потерями. Соответствующие построения приведены на рис. 4-79, из которого видно, что при перевозбуждении синхронный двигатель работает с опережающим током (потребляет опережающий ток), а при недовозбуждении — с отстающим током (потребляет отстающий ток).

Рис. 4-79. Диаграмма двигателя при различных возбуждениях.
При более точном определении V-образной кривой надо обратиться к диаграммам явнополюсной или неявнополюсной машины, которые должны быть построены с учетом насыщения для различных токовIприIcosφ=constиU=const. Потерями и в этом случае обычно пренебрегают.
V-образные кривые двигателя представлены нарис. 4-80. Они могут быть также сняты опытным путем.

Рис. 4-80. V-образные кривые двигателя.
д) Пуск в ход синхронного двигателя.
Синхронные двигатели долгое время находили себе применение лишь в редких случаях вследствие тех затруднений, которые создавались при пуске их в ход.
Электромагнитный вращающий момент Мэмбудет все время направлен в одну сторону только при синхронной частоте вращения ротора. Если же двигатель подключить к сети переменного тока, когда его ротор неподвижен, а в обмотке возбуждения имеется постоянный ток, то электромагнитный момент, получающийся от взаимодействия неподвижного поля полюсов и перемещающихся с синхронной частотой по окружности статора токов, будет в течение периода дважды изменять свое направление (над северным, например, полюсом ротора будут иметь место токи то одного направления, то, спустя полпериода, другого направления). Двигатель не придет во вращение, так как электромагнитный момент не сможет в течение полпериода разогнать ротор до синхронной частоты из-за его инерции.
Следовательно, для того чтобы электромагнитный вращающий момент в синхронном двигателе был направлен все время в одну сторону, необходимо до подключения синхронного двигателя к сети раскрутить его каким-нибудь посторонним двигателем до синхронной частоты вращения. После этого включение рубильника или масляного выключателя должно быть произведено в определенный момент времени, который устанавливается при помощи синхроноскопа. Способы включения здесь те же, что и для генератора.
Пуск синхронного двигателя при помощи постороннего двигателя, называемого разгонным или пусковым, обладает рядом крупных недостатков, которые и препятствовали широкому распространению синхронных двигателей.
При помощи разгонного двигателя, мощность
которого обычно составляла 5
![]() 15%
от номинальной мощности синхронного
двигателя, последний можно было пускать
только при малой нагрузке на валу.
Установка к тому же получалась громоздкой
и неэкономичной.
15%
от номинальной мощности синхронного
двигателя, последний можно было пускать
только при малой нагрузке на валу.
Установка к тому же получалась громоздкой
и неэкономичной.
В качестве разгонного двигателя обычно использовался асинхронный двигатель с числом полюсов на два меньшим, чем число полюсов синхронного двигателя.
В настоящее время пуск в ход при помощи разгонного двигателя на практике почти не применяется; он иногда находит себе применение главным образом для мощных синхронных компенсаторов (см. § 4-8,ж).
В последние годы почти во всех случаях практики применяется так называемый асинхронный пуск в ход. Синхронный двигатель при этом пускается как асинхронный. Его ротор должен быть снабжен специальной пусковой обмоткой, выполняемой так же, как продольно-поперечная успокоительная обмотка (рис. 4-46). Она мало отличается от короткозамкнутой обмотки ротора асинхронного двигателя. Стержни пусковой обмотки закладываются в пазы полюсных наконечников и соединяются на торцах пластинами, образующими короткозамыкающие кольца (рис. 4-81). Вместо пусковой клетки иногда используются массивные полюсные наконечники, которые на торцах также должны быть соединены пластинами.

Рис. 4-81. Ротор синхронного двигателя с пусковой (успокоительной) обмоткой
Принципиальная схема асинхронного пуска в ход синхронного двигателя приведена на рис. 4-82.

Рис. 4-82. Схема синхронного двигателя (при асинхронном пуске в ходе).
После включения двигателя в нем образуется вращающееся поле. Взаимодействие его с токами, наведенными в пусковой клетке, создает вращающий момент, так же как в короткозамкнутом асинхронном двигателе.
Обмотка возбуждения при этом должна
быть замкнута, так как в противном случае
в ней наводилась бы вращающимся полем
большая э.д.с., опасная не только для
изоляции обмотки, но и для обслуживающего
персонала. Ее замыкают для увеличения
пускового момента на сопротивление,
приблизительно в 8
![]() 12
раз большее сопротивления самой обмотки
возбуждения (переключатель нарис.
4-82должен быть включен вверх).
(При отсутствии пусковой клетки и при
замкнутой накоротко обмотке возбуждения
наблюдается "явление одноосного
включения" (см.§
3-21,д).)
12
раз большее сопротивления самой обмотки
возбуждения (переключатель нарис.
4-82должен быть включен вверх).
(При отсутствии пусковой клетки и при
замкнутой накоротко обмотке возбуждения
наблюдается "явление одноосного
включения" (см.§
3-21,д).)
Синхронный двигатель, вращаясь как асинхронный, доходит почти до синхронной частоты. Получающееся при этом скольжение зависит от нагрузки на валу и от параметров электрических цепей ротора. Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения под действием возникающего при этом синхронизирующего момента (переключатель на рис. 4-82должен быть включен вниз).
При асинхронном пуске в ход синхронных двигателей они обычно непосредственно подключаются к сети, если мощность сети достаточно велика и для нее допустимы большие пусковые токи, которые достигают в начале пуска 56-кратных значений по сравнению с номинальными. Если же необходимо уменьшить пусковые токи, то пуск производится при пониженном напряжении, так же как мощных асинхронных короткозамкнутых двигателей.
Здесь также применяется пуск при
переключении обмотки статора со звезды
на треугольник, что дает уменьшение
фазного напряжения при пуске в
![]() раз,
а линейного тока — примерно в 3 раза.
Чаше для понижения напряжения при пуске
используется автотрансформатор или
реактор (реактивная катушка). Соответствующие
принципиальные схемы пуска представлены
нарис
4-83.
раз,
а линейного тока — примерно в 3 раза.
Чаше для понижения напряжения при пуске
используется автотрансформатор или
реактор (реактивная катушка). Соответствующие
принципиальные схемы пуска представлены
нарис
4-83.

Рис. 4-83. Схема пуска синхронного двигателя при пониженном напряжении. а— автотрансформаторный пуск;б— реакторный пуск.
Автотрансформаторный пуск производится по схеме рис. 4-83,а, причем порядок пусковых операций следующий: замыкается выключательВ3, соединяющий обмотки автотрансформатораATв звезду; затем замыкается выключательВ1; по достижении двигателем некоторой определенной частоты вращения выключательВ3размыкается и автотрансформатор превращается в реактивную катушку; наконец, замыкается выключательВ2, и двигатель получает полное напряжение, после чего включается постоянный ток в обмотку возбуждения и двигатель входит в синхронизм.
Реакторный пуск производится по схеме рис. 4-83,б. Порядок пусковых операций в этом случае следующий: на первой стадии пуска замыкается выключательВ1; затем по достижении определенной частоты вращения замыкается выключательВ2и к двигателю подается полное напряжение; после этого включается постоянный ток в обмотку возбуждения и двигатель входит в синхронизм.
Автотрансформаторный пуск является
трехступенчатым пуском. На первой
ступени к двигателю подводится напряжение
U2, равное 40![]() 60%
номинального напряженияUн;
на второй ступени, когда автотрансформатор
используется как реактор, к двигателю
подводится напряжение, составляющее
70
60%
номинального напряженияUн;
на второй ступени, когда автотрансформатор
используется как реактор, к двигателю
подводится напряжение, составляющее
70![]() 80%
номинального. Пусковые токи, получаемые
из сети в начале пуска, здесь уменьшаются,
как показано ниже, пропорционально
квадрату напряжения.
80%
номинального. Пусковые токи, получаемые
из сети в начале пуска, здесь уменьшаются,
как показано ниже, пропорционально
квадрату напряжения.
Начальный пусковой ток в обмотке статора
уменьшается пропорционально напряжению.
Если при полном напряжении Uнна обмотке статора начальный пусковой
ток равенIнач,
то при напряженииU2он равен![]() .
Ток из сетиIс— ток первичной обмотки автотрансформатора,
имеющего коэффициент трансформации
.
Ток из сетиIс— ток первичной обмотки автотрансформатора,
имеющего коэффициент трансформации![]() ;
следовательно,
;
следовательно,![]() ,
т. е. ток сети пропорционален квадрату
напряжения, так же как начальный вращающий
момент, развиваемый двигателем.
,
т. е. ток сети пропорционален квадрату
напряжения, так же как начальный вращающий
момент, развиваемый двигателем.
При реакторном пуске ток сети Iс, поступающий в двигатель в начале пуска, пропорционален напряжению, тогда как начальный вращающий момент пропорционален квадрату напряжения. В этом — недостаток реакторного пуска по сравнению с автотрансформаторным. Однако к его преимуществам нужно отнести большую простоту схемы, меньшее количество необходимой аппаратуры. Поэтому при питании двигателей от достаточно мощных подстанций, когда допустимы большие пусковые токи, следует предпочесть более простой и дешевый реакторный пуск.
е) Рабочие характеристики синхронного двигателя.
На рис. 4-84представлены рабочие характеристики синхронного двигателя, полученные при постоянных напряжении и частоте сети и при постоянном возбуждении. По оси абсцисс здесь отложена полезная мощностьР2(мощность на валу).

Рис. 4-84. Рабочие характеристики синхронного двигателя.
Если при холостом ходе установлен соsφ = 1, то при увеличении нагрузки он будет уменьшаться, что должно быть ясно из рассмотренияV-образных кривых двигателя (рис. 4-80) и их построения (рис. 4-79).
Подведенная мощность P1,
больше мощности на валуР2на
величину потерь в двигателе ∑P.
Коэффициент полезного действия![]() в
зависимости отР2изображается
кривой, обычной для электрических машин.
в
зависимости отР2изображается
кривой, обычной для электрических машин.
На рис. 4-85изображены кривые, показывающие, как изменяетсяcosφс нагрузкой при различных значениях возбуждения. Кривая1аналогична кривойcosφ нарис. 4-84. Кривая2относится к случаю, когдаcosφ установлен равным единице при номинальной нагрузке. Эта кривая показывает, чтоcosφ при уменьшении нагрузки также уменьшается, но он будет соответствовать опережающему току, потребляемому двигателем из сети. Кривая3соответствует току возбуждения, который даетcosφ=lприР2= 0,5Р2н.

Рис. 4-85. Зависимость cosφ от нагрузки при различных возбуждениях.
Двигатели обычно рассчитываются для работы при номинальной нагрузке с cosφ= 0.9, соответствующим опережающему току. В этом случае машина будет служить не только в качестве двигателя, но и для улучшенияcosφ всей электрической установки.
Применение нормальных синхронных двигателей только для улучшения cosφ (для работы в режиме компенсатора) в обычных случаях нецелесообразно, так как при такой работе и при допустимом (номинальном) токе возбуждения ток статора получается меньше номинального и, следовательно, машина не полностью используется.
Синхронные двигатели обычно выполняются с возбудителем, посаженным на один с ними вал. Поэтому при малых мощностях они менее выгодны, чем асинхронные двигатели. Но, начиная со 100 кВт, а при низких частотах вращения и с меньшей мощности, синхронные двигатели в ряде случаев следует предпочесть асинхронным двигателям. Применение в системах возбуждения полупроводниковых выпрямителей вместо машинных возбудителей позволяет получить достаточно экономичные синхронные двигатели и при сравнительно небольших мощностях.
Основное преимущества синхронного двигателя, как уже отмечалось, его высокий cosφ. Это преимущество приводит не только к повышению использования всей электрической установки, но и к уменьшению размеров синхронного двигателя по сравнению с асинхронным (при прочих равных условиях). Последнее объясняется тем, что размеры электрической машины определяются ее кажущейся мощностью,aне активной. Кажущаяся мощность синхронного двигателя при созφ = 1 меньше, чем асинхронного, в отношении 1 :cosφ. Это особенно заметно при сравнении тихоходных двигателей, так какcosφатихоходного асинхронного двигателя имеет относительно небольшое значение.
Из других важных преимуществ синхронного двигателя отметим здесь возможность получить большой максимальный момент Мэм.мза счет увеличения воздушного зазора, так как при этом уменьшается синхронное сопротивлениеxd. Увеличение максимального вращающего момента асинхронного двигателя за счет увеличения воздушного зазора привело бы к значительному ухудшению егоcosφ. К тому же максимальный вращающий момент синхронного двигателя зависит от напряжения в первой степени, тогда как тот же момент асинхронного двигателя пропорционален квадрату напряжения.
ж) Синхронный компенсатор.
Как указывалось, синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу и предназначенный для компенсации сдвига фаз тока и напряжения или для регулирования напряжения в конце и в промежуточных точках линии электропередачи. Последнее достигается путем регулирования тока возбуждения синхронного компенсатора, что приводит к изменению реактивной составляющей тока линии электропередачи. Обычно синхронный компенсатор работает с перевозбуждением, потребляя из сети опережающий ток, как конденсатор. Поэтому его иногда называют синхронным конденсатором.
Пуск в ход синхронного компенсатора осуществляется при помощи разгонного двигателя, причем включение его в сеть на подстанциях Советского Союза довольно часто производится по методу самосинхронизации. В последние годы широко применяется также асинхронный пуск в ход при пониженном напряжении.
Заводами Советского Союза изготавливаются синхронные компенсаторы мощностью от 1000 до 75000 кВА.
Их номинальная мощность соответствует
режиму работы с опережающим напряжение
током (практически на 90°). Ток возбуждения
при этом режиме работы является
номинальным током возбуждения. Для его
уменьшения синхронные компенсаторы
обычно выполняются с меньшим воздушным
зазором, чем синхронные двигатели.
Вследствие этого их синхронное
сопротивление по продольной оси xd*
[д. е.] нередко достигает значений 2
![]() 2,2.
2,2.
4-9. Распределение активной и реактивной мощностей между параллельно работающими машинами
На основании изложенного в предыдущих параграфах можно сделать следующие выводы, касающиеся распределения активных и реактивных мощностей при параллельной работе синхронных машин в генераторном и двигательном режимах.
Общая нагрузка параллельно работающих
синхронных генераторов вполне определяется
двумя векторами: вектором напряжения
![]() и
вектором тока
и
вектором тока![]() .
Если даны эти два вектора, то мы можем
найти активную и реактивную мощности,
составляющие нагрузку.
.
Если даны эти два вектора, то мы можем
найти активную и реактивную мощности,
составляющие нагрузку.
Распределение активной мощности между
параллельно работающими синхронными
генераторами производится путем
воздействия на регуляторы частоты
вращения их первичных двигателей.
Воздействие на регуляторы скорости
вызывает изменение количества пара,
воды или горючего, поступающего в
первичный двигатель. При этом будет
изменяться вращающий момент, развиваемый
первичным двигателем, а следовательно,
и угол θ между векторами
![]() и
и![]() ,
что, как известно, вызывает изменение
активной мощности синхронной машины.
,
что, как известно, вызывает изменение
активной мощности синхронной машины.
На электрических станциях применяются автоматические регуляторы частоты вращения первичных двигателей. Для того чтобы распределение нагрузки между параллельно работающими генераторами соответствовало их номинальным мощностям, нужно правильно подобрать характеристики [п=f(P)] автоматических регуляторов.
Распределение реактивной мощности между параллельно работающими синхронными машинами производится путем воздействия на возбуждение этих машин.
Синхронный генератор при перевозбуждении отдает в сеть отстающий реактивный ток, а при недовозбуждении отдает опережающий реактивный ток. В генераторе фаза тока определяется относительно напряжения, действующего на зажимах обмотки статора.
Синхронный двигатель при перевозбуждении потребляет опережающий реактивный ток, а при недовозбуждении потребляет отстающий реактивный ток. Здесь фаза тока определяется относительно напряжения сети, которое принимается направленным прямо противоположно напряжению на зажимах машины в режиме генератора. Так как потребление отстающего реактивного тока эквивалентно отдаче в сеть опережающего тока и наоборот, то можно считать, что перевозбужденная синхронная машина независимо от того, работает ли она генератором или двигателем, отдает в сеть отстающую реактивную мощность, а недовозбужденная синхронная машина — генератор или двигатель — потребляет из сети отстающую реактивную мощность. Перевозбужденная синхронная машина может поэтому рассматриваться как емкость, а недовозбужденная синхронная машина — как индуктивность, включенная в сеть.
Понятия «перевозбуждение» и «недовозбуждение» синхронных машин вполне определяют их работу в отношении фазы реактивного тока.
На современных электрических станциях синхронные машины снабжаются автоматическими быстродействующими регуляторами напряжения, которые в то же время обусловливают автоматическое распределение реактивной мощности между машинами.
4-10. Реактивная машина
Как указывалось, реактивной машиной называется явнополюсная синхронная машина, работающая без возбуждения постоянным током (при Е0= 0). В такой машине электромагнитный вращающий момент получается из-за различияxdиxq[см. (4-77)].
Можно представить себе, что этот момент, называемый реактивным или «моментом явнополюсности», создается вследствие намагничивания ротора вращающимся магнитным полем и стремления полюсов ротора ориентироваться относительно поля так, чтобы магнитные сопротивления для его индукционных трубок были наименьшими.
Можно также объяснить возникновение реактивного момента в явнополюсной машине, исходя из закона электромагнитных сил. Для этого обратимся к рис. 4-86и будем считать, что ротор вращается с синхронной частотой, т. е. с такой же частотой, как и н.с.Fастатора.
 Рис.
4-86. К объяснению возникновения реактивного
момента в явнополюсной машине (режим
двигателя).
Рис.
4-86. К объяснению возникновения реактивного
момента в явнополюсной машине (режим
двигателя).
Примем распределение н.с. Faстатора по его окружности синусоидальным, так же как и статорных токовi, создающих ее. Электромагнитный момент в данном случае может возникнуть только в результате взаимодействия первой гармоники поля с токами статора, так как значения моментов от взаимодействия высших гармоник поля с токами статора (синусоидально распределенными) равны нулю. Чтобы найти первую гармонику поля машины, заменимFaее продольнойFdи поперечнойFqсоставляющими (рис. 4-86,а).
На рис. 4-86,бпоказаны кривые: продольногоBdи поперечногоBqполей, их первых гармоникBd1иBqlи первой гармоникиB1результирующего поля; здесь же снова показана кривая распределения токовiстатора. На рисунке мы видим, что кривая токовiи кривая поляB1сдвинуты между собой на угол, больший 90°; поэтому среднее значение электромагнитных сил, действующих на статор, не равно нулю (см§ 3-13,а;рис 3-42). Следовательно, возникает электромагнитный моментМр, действующий на статор, и точно такой же моментМр, действующий на ротор, но в противоположную сторону. Этот момент и есть реактивный момент.
Если бы мы имели равномерный воздушный зазор, то кривая поля машины совпадала бы с кривой Faи сдвиг между нею и кривой токовiбыл бы равен 90° (рис. 4-86,а). При таком сдвиге среднее значение тангенциальных электромагнитных сил было бы равно нулю, а следовательно, и электромагнитный момент был бы равен нулю. В машине с равномерным воздушным зазором электромагнитный момент при синхронной частоте вращения может получиться только при возбуждении машины постоянным током, так как только в этом случае получается сдвиг между кривыми поля и токов статора, отличающийся от 90°.
Реактивная машина получает намагничивающий ток от другой (или других) синхронной машины, параллельно с которой она должна работать. Очевидно, что этот ток является отстающим по отношению к напряжению сети, так же как и в случае недовозбужденной синхронной машины.
Векторную диаграмму реактивной машины можно получить из соответствующей диаграммы явнополюсной машины, положив в ней E0= 0. Нарис. 4-87приведены диаграммы реактивной машины:а) для генератора;б) для двигателя.

Рис. 4-87. Векторные диаграммы реактивной машины. a— генератора,б— двигателя.
Уравнение для электромагнитной мощности явнополюсной машины (4-75) в случае реактивной машины (E0= 0) принимает следующий вид:
![]() .
(4-85)
.
(4-85)
Оно может быть также получено непосредственно из диаграмм на рис. 4-87, если принять активное падение напряжения равным нулю. Для режима двигателя угол θ в (4-85) нужно считать отрицательным.
Максимум Рэмбудем иметь приsin2θ = 1, т. е. при θ = 45°. Следовательно, максимальное значение электромагнитной мощности реактивной машины
![]() .
(4-86)
.
(4-86)
Pэм.мбудет тем
больше, чем меньшееxqпо сравнению сxd.
Для нормальных синхронных машин обычно![]() .
Подставляя это значение в уравнение
дляPэм.м, получим
максимальную мощность нормальной
явнополюсной синхронной машины при
отсутствии возбуждения и приUн:
.
Подставляя это значение в уравнение
дляPэм.м, получим
максимальную мощность нормальной
явнополюсной синхронной машины при
отсутствии возбуждения и приUн:
![]() ,
(4-87)
,
(4-87)
где
![]() —
установившийся ток короткого замыкания
при возбуждении, соответствующем
номинальному напряжению при холостом
ходе.
—
установившийся ток короткого замыкания
при возбуждении, соответствующем
номинальному напряжению при холостом
ходе.
Так как ток Iк0обычно не превышает номинальногоIн,
то, следовательно, максимальный реактивный
момент нормальной явнополюсной машины
не превышает 25% номинального момента
(в крупных гидрогенераторах, где![]() снижается
до 0,6
снижается
до 0,6![]() 0,7,Мр.мможет составлять до 35
0,7,Мр.мможет составлять до 35![]() 40%
отМн).
40%
отМн).
Реактивный генератор на практике распространения не получил. Бывают случаи, когда явнополюсный генератор в результате обрыва цепи возбуждения работает как реактивный генератор, потребляя при этом большой реактивный (намагничивающий) ток. Но эти случаи должны быть отнесены к аварийным.
Турбогенератор как реактивный генератор
может развивать лишь очень небольшую
мощность, так как в нем
![]() .
Наблюдавшиеся на практике случаи, когда
турбогенераторы отдавали активную
мощность при отсутствии возбуждения,
соответствовали работе этих машин в
качестве асинхронных генераторов. Такая
работа для турбогенераторов может быть
допущена в течение непродолжительного
времени при небольшой нагрузке, так как
их скольжение, а следовательно, и потери
в роторе при этом относительно невелики.
Здесь роль короткозамкнутой обмотки
ротора выполняют контуры вихревых токов
и контуры, образованные металлическими
клиньями в пазах ротора.
.
Наблюдавшиеся на практике случаи, когда
турбогенераторы отдавали активную
мощность при отсутствии возбуждения,
соответствовали работе этих машин в
качестве асинхронных генераторов. Такая
работа для турбогенераторов может быть
допущена в течение непродолжительного
времени при небольшой нагрузке, так как
их скольжение, а следовательно, и потери
в роторе при этом относительно невелики.
Здесь роль короткозамкнутой обмотки
ротора выполняют контуры вихревых токов
и контуры, образованные металлическими
клиньями в пазах ротора.
На практике получили распространение
лишь реактивные двигатели. В таких
двигателях явнополюсный ротор не имеет
обмотки возбуждения, причем он выполняется
таким образом, что
![]() .
В этом случае согласно (4-85)
.
В этом случае согласно (4-85)
![]() .
(4-88)
.
(4-88)
Очевидно, что cosφ реактивных двигателей невысок, и это является одним из основных их недостатков.
Реактивные двигатели небольшой мощности (от нескольких Вт до нескольких сотен Вт) в последние годы получили большое распространение (схемы сигнализации, телемеханики, синхронной связи, звуковое кино, часы и пр.). Ценность их заключается в том, что они при сравнительно простой конструкции требуют для питания только переменный ток и вращаются при этом с частотой, строго соответствующей частоте питающего тока.
Наряду с трехфазными применяются также однофазные реактивные двигатели. Пуск в ход тех и других производится так же, как соответствующих асинхронных короткозамкнутых двигателей. Поэтому роторы их снабжаются пусковой клеткой.
4-11. Внезапное короткое замыкание синхронной машины
В синхронной машине, так же как и в любой другой электрической машине, при переходе от одного установившегося режима работы к другому возникает ряд явлений, изучение которых имеет важное значение, так как на практике с ними часто приходится иметь дело. Эти явления переходного процесса возникают вследствие изменения энергии магнитных полей машины, а также вследствие изменения кинетической энергии ее вращающихся частей.
Изменение кинетической энергии вызывается нарушением равновесия вращающих моментов, действующих на ротор машины. Возникающие при этом переходные процессы, если машина работает параллельно с другими синхронными машинами, характеризуются колебаниями частоты вращения около синхронной. Эти колебания («качания») синхронной машины будут рассмотрены в следующем § 4-12.
Мы здесь рассмотрим главным образом переходные процессы, которые обусловлены изменением энергии магнитных полей. Они возникают при всяком нарушении режима работы синхронной машины и особенно резко проявляются при внезапном коротком замыкании обмотки статора. В этом случае в обмотках статора и ротора возникают очень большие токи, во много раз превышающие их номинальные значения. Такие токи опасны не только для самой машины, но и для аппаратуры и других элементов распределительных устройств электрических станций и подстанций, с которыми она связана. В машине они создают значительные механические силы, особенно опасные для лобовых частей обмоток статора. Кроме того, создаются большие вращающие моменты, действующие на ротор и статор, которые также необходимо иметь в виду при конструировании машины.
Точное исследование процессов, возникающих в синхронной машине при ее внезапном коротком замыкании, весьма сложно. Поэтому приходится ограничиваться приближенным исследованием, основанным на ряде допущений.
Мы здесь рассмотрим эти процессы только с физической стороны и напишем некоторые соотношения, характеризующие их.
Рассмотрим сначала трехфазное короткое замыкание и примем, что частота вращения при этом остается неизменной. Будем считать, что активные сопротивления всех контуров машины равны нулю. Тогда согласно закону Ленца, который в этом случае называют «законом постоянства потокосцеплений», потокосцепления контуров должны остаться неизменными.
Пусть короткое замыкание произошло при холостом ходе машины, когда ось рассматриваемой фазы статора совпадала с осью полюсов, когда, следовательно, ее потокосцепление было наибольшим. При повороте ротора поток полюсов, сцепляющийся с этой фазой, будет уменьшаться и сделается равным нулю, когда ротор повернется на 90 эл. град. В фазе возникнет ток, стремящийся поддержать прежнее значение потокосцепления. При дальнейшем повороте ротора на 90 эл. град ток в фазе статора еще больше увеличивается, так как он должен не только создать прежнее потокосцепление, но и противодействовать н.с. обмотки возбуждения. Когда ротор снова повернется на 180 эл. град, т. е. займет исходное положение, то ток фазы будет равен нулю.
Мы можем считать, что ток в фазе будет иметь две составляющие: периодическую и апериодическую. Периодические токи фаз статора создадут вращающуюся н.с., неподвижную относительно полюсов. Ее ось совпадает с осью полюсов, так как эти токи можно рассматривать как чисто реактивные. Апериодические токи фаз статора создают поле, неподвижное относительно статора (неподвижное в пространстве).
Можно провести аналогию с трансформатором и принять при этом, что короткое замыкание обмотки статора аналогично включению короткозамкнутого трансформатора на синусоидальное напряжение (э.д.с. обмотки статора соответствует напряжению, приложенному к трансформатору).
Наибольшее значение тока в фазе статора получается по аналогии с трансформатором в том случае, если наведенная в ней э.д.с. в момент короткого замыкания была равна нулю. Оно получается, спустя полпериода после короткого замыкания, и принимается равным:
![]()
или
![]()
![]() .
(4-89)
.
(4-89)
Это наибольшее возможное значение тока при трехфазном коротком замыкании называется ударным током короткого замыкания. В (4-89) взят коэффициент 1,8 вместо 2, чтобы учесть затухание апериодической составляющей тока короткого замыкания. Принимается, что короткое замыкание произошло при
![]() .
.
Индуктивные сопротивления по продольной
оси
![]() называются
соответственно переходным и сверхпереходным.
Первое из них
называются
соответственно переходным и сверхпереходным.
Первое из них![]() нужно
брать для машин, не имеющих успокоительной
обмотки на роторе (соответствует
индуктивному сопротивлению короткого
замыкания двухобмоточного трансформатора),
второе
нужно
брать для машин, не имеющих успокоительной
обмотки на роторе (соответствует
индуктивному сопротивлению короткого
замыкания двухобмоточного трансформатора),
второе![]() —
для машин с успокоительной обмоткой на
роторе (соответствует индуктивному
сопротивлению трехобмоточного
трансформатора при замкнутых накоротко
обеих вторичных обмотках). Обычные
значения для переходного и сверхпереходного
индуктивных сопротивлений по продольной
оси:
—
для машин с успокоительной обмоткой на
роторе (соответствует индуктивному
сопротивлению трехобмоточного
трансформатора при замкнутых накоротко
обеих вторичных обмотках). Обычные
значения для переходного и сверхпереходного
индуктивных сопротивлений по продольной
оси:![]() =
0,15
=
0,15
![]() 0,4;
0,4;![]() =
0,11
=
0,11
![]() 0,20.
0,20.
Токи в обмотках машины при неустановившемся процессе короткого замыкания затухают, чему соответствует уменьшение энергии магнитных полей, сцепляющихся с обмотками, так как в действительности активные сопротивления обмоток не равны нулю. На рис. 4-88приведены осциллограммы токов обмоток при трехфазном коротком замыкании. Мы видим, что вначале ток статора быстро затухает в соответствии главным образом с затуханием апериодической составляющей тока в успокоительной обмотке. Этот процесс быстрого затухания тока принято называть сверхпереходным. Далее мы имеем переходный процесс до установившегося режима короткого замыкания. Здесь амплитуда переходного тока затухает в соответствии (в основном) с затуханием апериодической составляющей тока в обмотке возбуждения. Апериодическая .составляющая тока статора затухает довольно быстро; в соответствии с ней затухают переменные токи в успокоительной обмотке и в обмотке возбуждения.

Рис. 4-88. Осциллограммы токов при трехфазном коротком замыкании. а— тока фазы статораi1(прие0= 0 в момент замыкания);б—тока в обмотке возбужденияiв;в—тока в успокоительной обмоткеiу.
Ударный ток короткого замыкания создает очень большие электромагнитные (механические) силы, действующие на лобовые части обмотки статора; поэтому они должны быть надежно укреплены. Особенно это важно для больших машин с малым числом полюсов (турбогенераторы), имеющих относительно длинные лобовые части. Они здесь укрепляются при помощи бандажных колец K, охватывающих лобовые части и укрепленных в свою очередь при помощи кронштейнаВ(рис. 4-89).

Рис. 4-89. Крепления лобовых частей статорной обмотки турбогенератора.
Каждая катушка обмотки привязывается прочным шнуром к бандажным кольцам и, кроме того, между катушечными сторонами укрепляются дистанционные прокладки из изоляционного материала, чтобы предотвратить тангенциальные смешения катушечных сторон, особенно в местах их выхода из пазов.
Как отмечалось, создаются также очень большие моменты, действующие на статор и ротор. Их мгновенные значения особенно велики при двухфазном коротком замыкании. В этом случае они достигают примерно 10-кратного значения по сравнению с номинальным моментом. На такие моменты должны быть рассчитаны, например, болты, укрепляющие машину на фундаменте. Что касается вала и муфты, соединяющей синхронную машину с первичным двигателем, или с возбудителем, или с каким-либо рабочим механизмом, то момент Мв, действующий на них, будет зависеть от соотношения между маховым моментом (GD2)сротора синхронной машины и внешним маховым моментом (GD2)вн:
![]() ,
,
где Mк— наибольшее мгновенное значите электромагнитного момента при двухфазном коротком замыкании.
4-12. Качания синхронной машины
Как было установлено, при всяком изменении
нагрузки изменяется угол и между
векторами напряжения
![]() и
э.д.с.
и
э.д.с.![]() ,
так как каждой нагрузке соответствует
свой угол.
Если машины работают параллельно, то
при переходе любой из машин от одной
нагрузки к другой угол в обычно
устанавливается не сразу, а после
нескольких колебаний около конечного
своего значения.
,
так как каждой нагрузке соответствует
свой угол.
Если машины работают параллельно, то
при переходе любой из машин от одной
нагрузки к другой угол в обычно
устанавливается не сразу, а после
нескольких колебаний около конечного
своего значения.
Допустим, что генератор работает с сетью очень большой мощности и что момент, приложенный к его валу со стороны первичного двигателя, резко возрос от значения М1, до значенияМ2и в дальнейшем остался неизменным. Угловая частота вращения ротора ω, а следовательно, и угол θ начнут при этом возрастать. При изменении ω и θ возникнут момент сил инерции и синхронизирующий момент, которые, как будет показано, действуют в противоположные стороны. Вследствие этого процесс изменения угла θ от установившегося значения θ1, соответствующего моментуМ1,до установившегося значения θ2, соответствующего моментуМ2, носит колебательный характер, причем обычно колебания быстро затухают (рис 4-90).
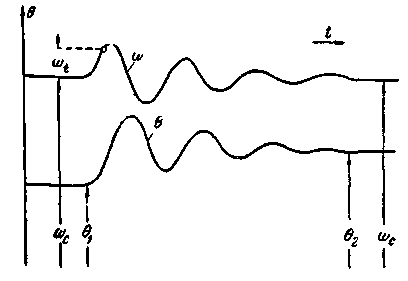
Рис. 4-90. Колебания угла θ и частоты ω при резком изменении нагрузки синхронной машины.
Частоту вращения машины ω мы можем представить как сумму двух частот вращения — постоянной синхронной ωси переменной ωt: ω = ωс+ ωt.
Рассмотренные колебания называются собственными или свободными Следовательно, синхронная машина вместе с другими машинами, работающими с ней параллельно, представляет собой систему, способную к собственным колебаниям, что является наряду с указанными ранее характерным свойством синхронной машины.
Помимо собственных колебаний синхронная машина может испытывать также вынужденные колебания, если внешний момент, приложенный к ее валу, периодически изменяется. Такие условия для синхронного генератора получаются, если первичным двигателем служит поршневая машина (паровая машина или двигатель внутреннего сгорания). Для синхронного двигателя те же условия возникают при нагрузке его, например, на поршневой насос или компрессор.
Периодически изменяющийся момент на валу синхронной машины нарушает нормальные условия ее работы, а в некоторых случаях может сделать эту работу невозможной.
В последующем мы будем рассматривать качания синхронной машины применительно к синхронному генератору, однако полученные при этом выводы могут быть отнесены в равной мере и к качаниям синхронного двигателя.
а) Вращающие моменты, действующие на ротор синхронной машины при ее качаниях.
Вначале рассмотрим параллельную работу синхронного генератора с сетью бесконечно большой мощности при периодически изменяющемся моменте на его валу.
Предположим, что генератор приводится во вращение каким-нибудь поршневым двигателем, например одноцилиндровым четырехтактным дизелем. Кривая зависимости вращающего момента такого двигателя от угла поворота в геометрических (механических) градусах показана на рис 4-91.

Рис. 4-91. Кривая вращающего момента одноцилиндрового четырехтактного дизеля.
Как видно, вращающий момент во времени периодически изменяется (период изменения равен времени, в течение которого двигатель сделает два оборота) Его можно представить в виде среднего момента М0, определяющего нагрузку синхронного генератора, и накладывающегося на него переменного моментаМк:
М=М0+Мк.
Момент Мкбудем называть "избыточным" или "качательным".
Избыточный момент обусловливает вынужденные колебания синхронной машины. Он представляет собой периодическую функцию времени, среднее значение которой равно нулю. Разложим его в гармонический ряд и представим в следующем виде:
![]() ,
(4-90)
,
(4-90)
где Мν— амплитуда ν-й гармоники избыточного момента;
ψν— ее фазный угол;
v— порядок гармоники или число импульсов вращающего момента за один оборот;
![]() —
средняя (синхронная) механическая
угловая частота.
—
средняя (синхронная) механическая
угловая частота.
Постоянный момент М0соответствует
постоянной мощности ωсМ0,
а следовательно, постоянному углу θ0между векторами![]() и
и![]() .
Переменный моментМксоздает
механические колебания ротора (и его
полюсов), которые вызовут колебания
вектора
.
Переменный моментМксоздает
механические колебания ротора (и его
полюсов), которые вызовут колебания
вектора![]() относительно
вектора
относительно
вектора![]() напряжения
сети (рис.
4-92), что в свою очередь вызовет
колебания тока и мощности синхронного
генератора.
напряжения
сети (рис.
4-92), что в свою очередь вызовет
колебания тока и мощности синхронного
генератора.

Рис. 4-92. Колебания вектора
![]() относительно
вектора
относительно
вектора![]() .
.
Если в частном случае принять, что вращающий момент, приложенный к валу генератора со стороны первичного двигателя, постоянен и равен М0, т е среднему значению рассмотренного ранее момента, то, очевидно, частота вращения ротора будет постоянной и никаких колебаний ее не будет В этом случае вращающий момент первичного двигателя будет уравновешиваться, если пренебречь потерями, только электромагнитным моментом генератора;
![]()
или
![]() .
(4-91)
.
(4-91)
При колебаниях угловой частоты ротора, вызванных периодически изменяющимся вращающим моментом первичного двигателя, на вал генератора будут действовать следующие вращающие моменты.
1.Момент со стороны первичного двигателя
![]() .
(4-92)
.
(4-92)
2.Электромагнитный момент
![]() .
.
Так как угловая частота колебания ωtмала по сравнению с синхронной угловой частотой ωс, то можем написать:
![]() .
.
Имея в виду малые колебания, т. е малое
значение угла колебания или отклонения
θ'. можно принять, что cosθ'![]() 1
иsinθ'
1
иsinθ'![]() θ',
и считать приближенно электромагнитный
момент, кГ·м,
θ',
и считать приближенно электромагнитный
момент, кГ·м,
![]() ,
(4-93)
,
(4-93)
где Мс— удельный, аМcθ' — полный синхронизирующие моменты
3.Момент сил инерции всех вращающихся частей агрегата (первичного двигателя и генератора) может быть найден следующим образом.
Обозначим через Jмомент инерции вращающихся частей агрегата, тогда кинетическая энергия, запасенная этими частями, будет равна:
![]() .
.
Взяв первую производную энергии Апо времени и разделив ее на угловую частоту ωс+ωt, найдем искомый момент сил инерции
![]() .
(4-94)
.
(4-94)
Механическая угловая частота колебания при рпарах полюсов машины равна:
![]() . (4-95)
. (4-95)
Из (4-94) и (4-95) получаем:
![]() .
(4-96)
.
(4-96)
4.Успокоительный момент, создаваемый в результате взаимодействия поля и токов, наведенных им в успокоительной обмотке, уменьшает механические колебания ротора, что и дало повод назвать короткозамкнутую обмотку на роторе успокоительной. Она при качаниях вместе с ротором вращается то быстрее, то медленнее поля, следовательно, относительно поля имеет то отрицательное, то положительное скольжение. Это переменное скольжение
![]() .
(4-97)
.
(4-97)
Успокоительный момент, называемый также асинхронным, при малых скольжениях приближенно можно считать пропорциональным скольжению:
![]() ,
(4-98)
,
(4-98)
где D— коэффициент пропорциональности, кг·м·с.
Таким образом, уравнение вращающих моментов, действующих на ротор синхронной машины при ее качаниях, получается в следующем виде:
![]() .
(4-99)
.
(4-99)
Так как в этом уравнении Мэм0= -M0, то, подставляя в него найденные выражения для отдельных моментов, получим:
![]() .
(4-100)
.
(4-100)
Решение полученного линейного дифференциального уравнения, коэффициенты которого принимаются постоянными, как известно, не представляет затруднений. С формальной стороны оно ничем не отличается от дифференциального уравнения колебательного процесса чисто механической системы, в которой роль синхронизирующего момента играет момент упругой силы какой-либо пружины, а роль момента успокоительной обмотки — момент сил трения, или, например, процесса в электрическом колебательном контуре, состоящем из индуктивности, емкости и сопротивления.
Если известна кривая избыточного момента, которая находится по индикаторной диаграмме поршневого двигателя, то можно определить ее гармоники. Решая уравнение (4-100), можно найти углы отклонения при качаниях, обусловленные каждой из этих гармоник, а затем, просуммировав их, найти результирующий угол отклонения.
б) Колебания ротора под действием периодически изменяющегося момента на его валу.
Найдем изменение углового отклонения
![]() ,
вызванного-й
гармоникой избыточного момента. Для
этого уравнение (4-100)
напишем в следующем виде:
,
вызванного-й
гармоникой избыточного момента. Для
этого уравнение (4-100)
напишем в следующем виде:
![]() .
(4-101)
.
(4-101)
Решением этого уравнения при установившихся колебаниях будет синусоидальная функция времени, которую мы можем представить в виде временного вектора
![]() .
(4-102)
.
(4-102)
где
![]() —
амплитуда углового отклонения, вызванного
ν-й гармоникой избыточного моментаМν;
—
амплитуда углового отклонения, вызванного
ν-й гармоникой избыточного моментаМν;
φν— сдвиг по фазеМνи![]() .
.
Следовательно, уравнение (4-101) можно написать в векторной форме:
![]() (4-103)
(4-103)
или соответственно
![]() .
(4-104)
.
(4-104)
Согласно (4-104)
и (4-103)
нарис.
4-93построена векторная диаграмма
моментов. (Пунктирный вектор — есть
вектор мощности, колеблющейся с частотой
νωc. Амплитуда этой
мощности равна:
![]() .)
.)

Рис. 4-93. Векторная диаграмма моментов.
Из нее находим амплитуду углового отклонения
 .
(4-105)
.
(4-105)
Если частота νωсколебанияν-й гармоники удовлетворяет равенству
![]() ,
(4-106)
,
(4-106)
то амплитуда
![]() может
достичь весьма большого значения,
особенно при маломD:
может
достичь весьма большого значения,
особенно при маломD:
![]() .
(4-107)
.
(4-107)
Частота колебаний, найденная из (4-106),
![]() (4-108)
(4-108)
есть так называемая резонансная частота.
Частоту собственных колебаний найдем из уравнения (4-101), приравняв его правую часть нулю
![]() .
(4-109)
.
(4-109)
Разделим это уравнение на
![]() и
введем обозначения:
и
введем обозначения:
![]() ;
(4-110)
;
(4-110)
![]() .
(4-111)
.
(4-111)
Тогда оно будет иметь следующий вид:
![]() .
(4-112)
.
(4-112)
Решением этого уравнения, как известно, будет:
![]() ,
(4-113)
,
(4-113)
где
![]() —
начальное отклонение;
—
начальное отклонение;
δ0— коэффициент затухания;
ωсв— частота собственных или свободных колебаний, равная
![]() .
(4-114)
.
(4-114)
так как
![]() во
много раз меньше
во
много раз меньше![]() .
.
Сравнивая выражения для частоты собственных колебаний (4-114) и для резонансной частоты (4-108), мы видим, что они практически равны между собой. Поэтому мы можем говорить, что резонанс наступает в том случае, когда частота вынужденных колебаний равна частоте собственных колебании.
Для спокойной работы машины необходимо стремиться к тому, чтобы частота собственных колебаний была меньше частоты первой гармоники избыточного момента (ωсв< ωc), а следовательно, и меньше частоты любой из высших гармоник (ωсв< νωc). В большинстве случаев это удается сделать, увеличивая маховой момент агрегата.
При одиночной работе синхронного
генератора, когда он работает на свою
собственную сеть, не имеющую других
синхронных машин, не может возникнуть
синхронизирующий момент, так как при
колебаниях вектор
![]() будет
колебаться вместе с вектором
будет
колебаться вместе с вектором![]() .
Следовательно, такая машина не представляет
собой системы, способной к собственным
колебаниям.
.
Следовательно, такая машина не представляет
собой системы, способной к собственным
колебаниям.
Приведем здесь практические формулы для расчета частоты собственных колебаний. Они получаются путем преобразования уравнения (4-114).
Удельный синхронизирующий момент
(Момент
![]() при
колебаниях будет несколько изменяться
вследствие измененияE0иxd.
ВеличиныE0иxdне остаются постоянными при колебаниях
из-за воздействия на соответствующие
поля токов, возникающих в успокоительной
обмотке и главным образом в обмотке
возбуждения, так как ее постоянная
времени соизмерима с периодом колебаний.
Поэтому приведенные выводы следует
рассматривать как приближенные.), если
принятьcosθ0
при
колебаниях будет несколько изменяться
вследствие измененияE0иxd.
ВеличиныE0иxdне остаются постоянными при колебаниях
из-за воздействия на соответствующие
поля токов, возникающих в успокоительной
обмотке и главным образом в обмотке
возбуждения, так как ее постоянная
времени соизмерима с периодом колебаний.
Поэтому приведенные выводы следует
рассматривать как приближенные.), если
принятьcosθ0![]() l,
равен:
l,
равен:
![]()
где
![]() —
ток короткого замыкания при данном
возбуждении (E0по спрямленной характеристике холостого
хода,xd— ненасыщенное значение).
—
ток короткого замыкания при данном
возбуждении (E0по спрямленной характеристике холостого
хода,xd— ненасыщенное значение).
Имеем
![]() ,
,
где Sн— номинальная мощность, кВ·А.
Заменим далее момент инерции Jмаховым моментом
![]() ,
,
где g= 9,81 м/с2;
G— вес всех вращающихся частей, кг, приведенный к диаметру инерцииD, м.
Теперь, учитывая, что
![]() и
и![]() ,
получим вместо (4-114),
Гц:
,
получим вместо (4-114),
Гц:
![]()
где
![]() .
.
Частота собственных колебаний fсвдля дизель-генераторов и крупных
гидрогенераторов обычно лежит в пределахfсв= 1![]() 2
Гц.
2
Гц.
4-13. Потери и коэффициент полезного действия
Потери в синхронной машине состоят из:
электрических потерь в обмотке статора;
магнитных потерь в стали статора;
добавочных потерь в полюсных наконечниках или в поверхностном слое бочки ротора, вызванных пульсациями поля вследствие зубчатости внутренней поверхности статора и высшими гармоническими поля статора;
механических потерь на трение в подшипниках и вращающихся частей о воздух или другой газ, охлаждающий машину;
потерь на возбуждение, причем к последним относятся не только потери в обмотке возбуждения, но и потери в возбудителе, если он посажен на один вал с синхронной машиной, и в регулировочных реостатах;
добавочных потерь при нагрузке, вызванных полями рассеяния статора.
Перечисленные потери в сумме (∑Р) составляют небольшую долю от номинальной мощности машины. Эта доля уменьшается с ростом ее мощности.
Коэффициент полезного действия (к.п.д.) синхронной машины определяется:
для генератора по формуле
![]() ;
;
для двигателя по формуле
![]() .
.
Значения к.п.д. синхронных генераторов и двигателей отечественных заводов приведены на рис. 4-94.

Рис. 4-94. Значения к.п.д. (η) синхронных генераторов и двигателей при номинальном режиме их работы в зависимости от номинальной мощностиРн.
Значения к.п.д. крупных гидрогенераторов
колеблются в пределах 96
![]() 98,
турбогенераторов 97
98,
турбогенераторов 97![]() 98,8%.
98,8%.
4-14. Нагревание и охлаждение
Нагревание отдельных частей синхронной машины обусловлено потерями, возникающими в ней при ее работе. Установившиеся превышения температуры этих частей, так же как и для асинхронной машины, не должны превышать определенных пределов, зависящих от класса изоляционных материалов, примененных для ее обмоток.
Для изоляции обмоток статора и ротора гидрогенераторов мощностью 1000 кВА и выше, а также гидрогенераторов напряжением 6300 В и выше независимо от мощности применяются изолирующие материалы класса В, причем эти материалы подвергаются пропитке асфальтобитумным составом. В этом случае допускается превышение температуры обмотки статора не выше 70°С при температуре охлаждающего воздуха 35°С.
Допускаемое превышение температуры обмотки возбуждения в случае, если она выполняется из полосовой голой меди, намотанной на ребро в один ряд с прокладками между витками из изолирующего материала класса В, принимается равным 95°С.
Для изоляции обмоток статора и ротора турбогенератора применяются, как правило, изолирующие материалы класса В. При температуре охлаждающего газа (воздуха или водорода) 40°С допускаются следующие превышения температуры: для обмотки статора, пропитанной асфальтобитумным составом, 65°С, для обмотки ротора 90°С и для активной стали 65°С.
Охлаждение электрической машины, как ранее указывалось, осуществляется главным образом посредством обдувания ее нагретых поверхностей воздухом. Охлаждение должно быть тем интенсивнее, чем больше мощность машины. Количество воздуха, которое необходимо прогнать через машину для ее охлаждения, тем больше, чем больше в ней потери. Оно может быть подсчитано, м3/с,
![]()
где ∑P— сумма потерь, кВт;
с— объемная теплоемкость воздуха, кВт·с/°С·м3;
Δθ — нагрев воздуха при прохождении его через машину, °С.
Количество воздуха, потребного для
отвода тепла из мощных турбогенераторов
или гидрогенераторов, достигает больших
значений. Так, например, для турбогенератора
25000 кВт, потери которого при номинальной
нагрузке (cosφн=
0,8) составляют 660 кВт, при Δθ![]()
20°С, с= 1,1 получим согласно предыдущей формуле:
![]()
или 30·3600 = 108000 м3/ч.
Такое большое количество воздуха можно прогнать через машину только при помощи специальных вентиляторов, создавая в вентиляционных каналах достаточного сечения большие скорости воздуха.
Как отмечалось, вопросам охлаждения электрических машин уделяется большое внимание. Только при правильном разрешении этих вопросов удается построить надежно работающие машины, мощность которых в настоящее время достигает сотен тысяч киловатт.
Нормальные явнополюсные синхронные
машины мощностью примерно до 3000
![]() 4000
кВ·А выполняются обычно открытой или
защищенной конструкции, при которой
воздух проходит с боковых сторон машины
и выбрасывается в отверстия корпуса
статора. Здесь значительное вентилирующее
действие создают полюсы. Если этого
действия недостаточно, то на валу с
обеих сторон полюсов помещают крыльчатые
вентиляторы.
4000
кВ·А выполняются обычно открытой или
защищенной конструкции, при которой
воздух проходит с боковых сторон машины
и выбрасывается в отверстия корпуса
статора. Здесь значительное вентилирующее
действие создают полюсы. Если этого
действия недостаточно, то на валу с
обеих сторон полюсов помещают крыльчатые
вентиляторы.
Для турбогенераторов ранее широко применялась так называемая протяжная система вентиляции, при которой охлаждающий воздух забирается извне. Воздух при этом подводится к машине по особым каналам, расположенным под полом машинного зала. Этот воздух приходится очищать при помощи фильтров, так как наличие в воздухе посторонних примесей (пыли, вредных газов, чрезмерной влаги) может пагубно отразиться на работе машины. Применение фильтров, однако, не дает радикального решения задачи, так как они все же пропускают пыль в машину.
Значительно более совершенной является замкнутая система вентиляции или вентиляция по замкнутому циклу, при которой одно и то же количество воздуха проходит через генератор, воздухоохладители и снова поступает в генератор.
Воздухоохладители состоят из ряда трубок с ребрами, между которыми проходит подлежащий охлаждению воздух; по трубкам воздухоохладителя прогоняется вода. Замкнутая вентиляция по сравнению с протяжной вентиляцией имеет следующие преимущества: 1) почти полное отсутствие пыли в охлаждающем воздухе; 2) почти полное устранение опасности появления в воздухе влаги; 3) отсутствие длинных подводящих каналов для воздуха; 4) значительное уменьшение шума, создаваемого движущимся воздухом.
Все современные турбогенераторы, а также гидрогенераторы мощностью свыше 4000 кВ·А изготавливаются с вентиляцией по замкнутому циклу. К преимуществам такой вентиляции нужно отнести возможность применения в качестве охлаждающего газа водорода. Водородное охлаждение применяется для турбогенераторов, начиная с 25 тыс. кВт и выше. Применяют его также для мощных синхронных компенсаторов. Водородное охлаждение наряду с повышением охлаждающего эффекта значительно уменьшает потери в машине на трение ее вращающихся частей о газ. Его применение наиболее рационально для быстроходных машин с большой окружной скоростью, например для турбогенераторов на 3000 об/мин.
Снижение указанных потерь при применении
водорода обусловлено меньшей плотностью
этого газа. Он обычно представляет собой
смесь, состоящую из 97
![]() 98%
водорода и 3
98%
водорода и 3![]() 2%
воздуха. Плотность его составляет около
10% от плотности воздуха, вследствие чего
вентиляционные потери при водородном
охлаждении уменьшаются примерно в 10
раз по сравнению с воздушным охлаждением.
Уменьшение этих потерь приводи к
заметному повышению к.п.д. (на 0,8
2%
воздуха. Плотность его составляет около
10% от плотности воздуха, вследствие чего
вентиляционные потери при водородном
охлаждении уменьшаются примерно в 10
раз по сравнению с воздушным охлаждением.
Уменьшение этих потерь приводи к
заметному повышению к.п.д. (на 0,8![]() 1,3%
при полной нагрузке и еще больше при
меньших нагрузках).
1,3%
при полной нагрузке и еще больше при
меньших нагрузках).
В замкнутой системе вентиляции всегда поддерживается избыточное давление водорода [порядка 0,05 кГ/см2(или 0,05 атм) и иногда больше]. Таким образом, в случае нарушения уплотнений исключается возможность проникновения в машину воздуха и образования газовой смеси, опасной в отношении взрыва.
Выше рассматривалось так называемое
поверхностное (косвенное) охлаждение,
при котором тепло отводится газом с
нагретых поверхностей лобовых частей
обмоток, стали статора и ротора. При
этом неизбежно получается довольно
большая разность температур меди обмотки
и стенок паза. Ее обычно называют
температурным перепадом в пазовой
изоляции. Этот температурный перепад
в крупных машинах на высокие напряжения
достигает значения 30
![]() 35°С,
которое во многих случаях приходится
считать предельным, так как при больших
значениях возможно повреждение изоляции
из-за различных удлинений пазовой части
обмотки и стали, обусловленных различием
коэффициентов линейного расширения
меди и стали, особенно при большой длине
статора и ротора (например, для
турбогенераторов). Кроме того, надо
учитывать температурный перепад при
переходе тепла с поверхности стали
статора к охлаждающему газу, который в
ряде случаев не удается получить меньше
15
35°С,
которое во многих случаях приходится
считать предельным, так как при больших
значениях возможно повреждение изоляции
из-за различных удлинений пазовой части
обмотки и стали, обусловленных различием
коэффициентов линейного расширения
меди и стали, особенно при большой длине
статора и ротора (например, для
турбогенераторов). Кроме того, надо
учитывать температурный перепад при
переходе тепла с поверхности стали
статора к охлаждающему газу, который в
ряде случаев не удается получить меньше
15![]() 20°С.
Следовательно, если учесть еще средний
подогрев газа в машине порядка 15°С, то
получается предельное допускаемое
превышение температуры для обмотки
статора. При определении превышения
температуры обмотки возбуждения
турбогенератора надо прибавить еще
температурный перепад в зубцах ротора
(10
20°С.
Следовательно, если учесть еще средний
подогрев газа в машине порядка 15°С, то
получается предельное допускаемое
превышение температуры для обмотки
статора. При определении превышения
температуры обмотки возбуждения
турбогенератора надо прибавить еще
температурный перепад в зубцах ротора
(10![]() 15°С)
при переходе тепла от стенок паза к
поверхности ротора, омываемой газом.
15°С)
при переходе тепла от стенок паза к
поверхности ротора, омываемой газом.
Указанные температурные перепады зависят от потерь в обмотках и стали, а также от потерь на трение. Следовательно, эти потери не должны превышать при данных размерах машины некоторых определенных значений. Поэтому при поверхностном охлаждении мы вынуждены брать для обмоток сравнительно небольшие плотность тока и линейную нагрузку, от произведения которых зависит температурный перепад в пазовой изоляции. Этим и объясняется то, что при максимальных допустимых (в отношении прочности материалов) размерах ротора предельной мощностью турбогенератора с поверхностным охлаждением является мощность порядка 150 тыс. кВт (первые машины на эти мощности были построены в Советском Союзе).
Повышение мощности турбогенераторов сверх примерно 150000 кВт стало возможным при применении внутреннего непосредственного охлаждения обмоток, когда охлаждающее вещество непосредственно соприкасается с голой медью. В этом случае охлаждение получается весьма эффективным, в особенности если в качестве охлаждающего вещества применяется вода (хорошо очищенная, дистиллированная). Проводники при этом делаются полыми или с вырезами, образующими каналы. Внутри проводников прогоняется газ или вода, подвод которой для обмотки статора делается при помощи шлангов из изоляционного материала. При наличии каналов, образованных вырезами в проводниках, что делается для обмотки ротора турбогенератора, по ним прогоняется водород.
При внутреннем непосредственном
охлаждении обмоток турбогенераторов
для повышения эффективности теплосъема
с нагретых поверхностей давление
водорода, циркулирующего внутри машины,
доводят до 3
![]() 3,5
атм, так как коэффициенты теплоотдачи
(Вт/°С·см2) увеличиваются
пропорционально абсолютному давлению
водорода примерно в степени 0,8. Указанные
мероприятия позволили при сохранении
тех же размеров значительно повысить
мощности турбогенераторов (320000 кВт,
заводы Советского Союза).
3,5
атм, так как коэффициенты теплоотдачи
(Вт/°С·см2) увеличиваются
пропорционально абсолютному давлению
водорода примерно в степени 0,8. Указанные
мероприятия позволили при сохранении
тех же размеров значительно повысить
мощности турбогенераторов (320000 кВт,
заводы Советского Союза).
Мощности гидрогенераторов в настоящее время также достигают весьма больших значений. Здесь для обмоток статора также предусматривается внутреннее водяное охлаждение. Обмотка возбуждения выполняется таким образом, чтобы ее поверхность, непосредственно омываемая воздухом, была возможно больше. Для этого оставляются промежутки между сердечниками полюсов и катушками, выполняемыми из полых проводников, что создает достаточное увеличение поверхностей, омываемых воздухом, и, следовательно, обеспечивает надлежащие условия охлаждения.
4-15. Синхронные машины заводов Советского Союза
Синхронные машины, выпускаемые заводами Советского Союза, по своим характеристикам, экономичности и надежности в работе не уступают машинам передовых заводов США и европейских стран. Конструкции их вполне характеризуют современное состояние электромашиностроения в данной области. Многие заводы Советского Союза выпускают синхронные машины, предназначенные для работы в качестве генераторов, двигателей или синхронных компенсаторов. Явнополюсные генераторы небольшой мощности, начиная с нескольких киловольт-ампер, предназначаются для небольших передвижных или стационарных электроустановок. Большое количество генераторов выпускается для колхозных и межколхозных гидроэлектростанций.
Синхронные двигатели также находят
себе все более широкое применение. Они
во многих случаях вытесняют мощные
асинхронные двигатели, по сравнению с
которыми они, как указывалось, обладают
рядом существенных преимуществ: высокий
cosφ(при
необходимости могут работать с опережающим
током и тем самым улучшатьcosφвсей электроустановки),
несколько более высокий к.п.д. из-за
меньших потерь в обмотках статора и
ротора, менее чувствительны к понижению
напряжения сети (их максимальный моментМм![]() U,
тогда как для асинхронных двигателейМм
U,
тогда как для асинхронных двигателейМм![]() U2).
U2).
Особенно больших успехов в Советском Союзе достигли турбогенераторостроение и гидрогенераторостроение.
Первый турбогенератор на 100 тыс. кВт и 3000 об/мин был построен в СССР в 1937 г. Это была уникальная машина, намного опередившая зарубежную технику. В США такую машину построили только в 1951 г.
В настоящее время на ряде электрических станций Советского Союза работают турбогенераторы на 100000 кВт и 3000 об/мин с водородным охлаждением, изготовленные Ленинградским заводом «Электросила» имени С.М. Кирова. Тем же заводом в 1952 г. был изготовлен турбогенератор с поверхностным водородным охлаждением на 150000 кВт, затем были построены турбогенераторы с форсированным (внутренним) охлаждением обмотки ротора и водяным охлаждением обмотки статора на 165000 и 320000 кВт. Были выпущены также турбогенераторы с внутренним водородным охлаждением обмоток статора и ротора на 200000 кВт. В настоящее время разработаны проекты турбогенераторов с водяным охлаждением не только обмотки статора, но и обмотки ротора.
Следует также отметить уникальные синхронные компенсаторы на 75000 кВА, изготовленные в последние годы на заводах Советского Союза.
Гидрогенераторы Днепровской, Щербаковской, Угличской, Волжской имени Ленина, Волгоградской имени XXIIсъезда КПСС и других гидроэлектростанций, изготовленные в Советском Союзе, являются образцовыми для этого типа машин и превосходят по своим характеристикам и технико-экономическим показателям аналогичные машины зарубежных заводов. В настоящее время изготовлены первые гидрогенераторы для Братской ГЭС на 225000 кBт, 15750B,cosφ= 0,85, 125 об/мин (2р = 48); разработаны проекты гидрогенераторов для Красноярской ГЭС на 500000 кВт, 15750 В, иcosφ =0,85, 93,8 об/мин (2р = 64).
Конструкции современных турбогенераторов и гидрогенераторов приведены на рис. 4-954-97.

Риc. 4-95. Турбогенератор Харьковского завода тяжелого электромашиностроения мощностью 300000 кBт, 3000 об/мин, 20000Bс непосредственным охлаждением газом обмоток статора и ротора.

Рис. 4-96. Гидрогенератор Волжской ГЭС имени В.И. Ленина мощностью 115000 кBт, 68,2 об/мин выпуска 1953 г.

Рис. 4-97. Продольный разрез гидрогенератора завода "Уралэлектроаппарат" мощностью 2675 кB·A, 6300B, 215 об/мин.