

8. Регулирование скорости в аэп с пч с ув.
В АЭП с преобразователем частоты и имеющим в структуре управляемый выпрямитель регулирование скорости ω осуществляется в широком диапазоне, при этом обеспечиваются достаточно высокие показатели качества. Регулирование ω осуществляется воздействием на АИ с помощью БУИ при одновременном воздействии на УВ с помощью БУВ в соответствии с законом регулирования. При этом возможно двухзонное регулирование. Однако для механизмов с MC = const, и для механизмов с линейно возрастающей МС регулирование вверх ограниченно тем, что для этого необходимо одновременно с увеличением частоты относительно fНОМ, увеличивать напряжение. В результате чего может произойти пробой изоляции. Регулирование ω вверх применяется значительно реже, чем в диапазоне вниз и в незначительных пределах.
В общем случае семейство регулировочных характеристик будет иметь вид:
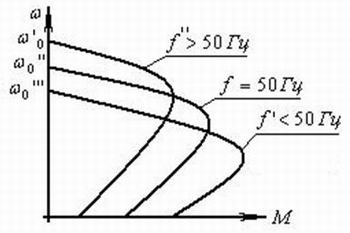 рис.15
рис.15
Показатели качества регулирования:
Стабильность при частотном регулировании высокая т.к. характеристики в рабочей части имеют одинаковую жесткость.
Плавность практически не ограничена.
Высокая экономичность, однако при глубоком регулировании вниз от основной частоты, при котором требуется существенное уменьшение угла управления α выпрямителя и при этом коэффициент мощности привода в целом может оказаться очень низким.
Регулирование в основном осуществляется при MC = const на валу двигателя.
Направление двухзонное, в основном применяется регулирование вниз.
Диапазон регулирования Д=100÷1.
9. Пуск в аэп с пч с ув.
Пуск начинается при пониженном напряжении и при минимальной частоте, что соответственно обеспечивает отсутствие броска тока или минимизацию тока и одновременно большие пусковые моменты. При этом инвертор работает с большими периодами коммутации силовых ключей, а УВ с углом управления α = П/2. Энергетическая эффективность пуска в такой системе уменьшается за счет того, что в начале пуска привод потребляет большое количество реактивной составляющей.
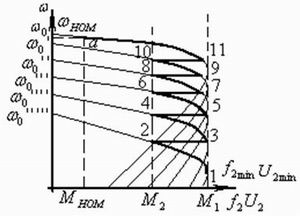 рис.16
рис.16
10. Торможение в аэп с пч с ув.
Достоинство этой системы: возможность торможения в рекуперативном режиме, что связано с наличием в структуре УВ, который обладает двухсторонней проводимостью, что позволяет рекуперировать преобразованную электрическую энергию в сеть. При этом процесс рекуперативного торможения реализуется следующим образом: в момент начала торможения частота и напряжение по отношению к номинальным уменьшается. При этом измененные скачком, частота и напряжение, достаточны для того чтобы рабочая точка переместилась во второй квадрат. Последующие скачки уменьшения частоты и напряжения должны быть такими, чтобы в процессе всего торможения рабочая точка не выходила за пределы второго квадранта.
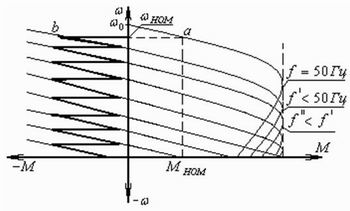 рис.17
рис.17
10.1 Торможение противовключением (тп)
Для ТП в рассмотренной схеме предполагается работа выходного блока только в режиме инвертирования, а входного только в режиме выпрямления. Для реализации этого способа, который заключается в проследовании чередования фаз на выходе инвертора, необходимо наличие контактора. Бесконтактным способом изменить чередование фаз невозможно. Наряду с энергетической неэффективностью имеется второе негативное свойство – отсутствие быстродействия (быстродействие торможения –преимущество ТП) . ТП в таких устройствах не применяется.