

24. Влияние длины монтажного кабеля на перенапряжения на зажимах двигателя.
При эксплуатации
электроприводов когда для связи между
выходом преобразователя и статорной
обмоткой АД необходимо применять
монтажный кабель большой протяженности
начинают проявляется нежелательные
режимы , связанные с возникновением
перенапряжения на зажимах двигателя.
Неоспоримые достоинства транзисторных
IGBT-инверторов напряжения (АИН) с
широтно-импульсным управлением (ШИМ) в
регулируемом асинхронном электроприводе
сочетаются однако с рядом проблем, одной
из которых является проблема "длинного
кабеля", соединяющего обмотки двигателя
(АД) с выходом АИН. Выходное напряжение
U1
АИН с ШИМ приставляет собой высокочастотную
последовательность прямоугольных
импульсов различной полярности и
длительности с одинаковой амплитудой
Ud
(значение постоянного напряжения на
входе АИН).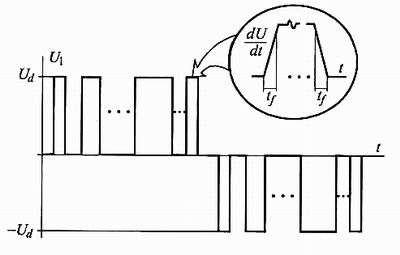 рис.29
рис.29
Выходное напряжение АИН с ШИМ.
Крутизна фронта
![]() ,
импульсов напряжения определяется
скоростью переключения силовых ключей
АИН и при использовании различных
полупроводниковых приборов составляет:
,
импульсов напряжения определяется
скоростью переключения силовых ключей
АИН и при использовании различных
полупроводниковых приборов составляет:
• однооперационные тиристоры SCR - 4-10 мкс;
• запираемые тиристоры GТО - 2-4 мкс;
• силовые биполярные тиристоры GTR - 0,5-2 мкс;
• транзисторы IGBT - 0,05-0,1 мкс.
Существенно более высокое быстродействие IGBT-транзисторов, являющееся преимуществом для реализации высокочастотной ШИМ и минимизации потерь энергии в АИН и АД, негативно проявляется в протекании переходных процессов в цепи АИН - соединительный кабель - АД на интервалах времени фронта tf.
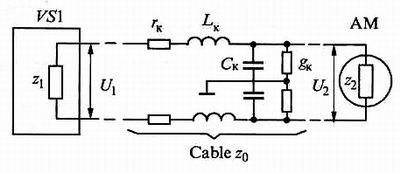 рис.30
рис.30
Цепь соединения АИН с АД (эквивалентная схема).
Прохождение импульсного сигнала с крутым фронтом вызывает волновые процессы в кабеле, приводящие к появлению перенапряжений на зажимах двигателя.
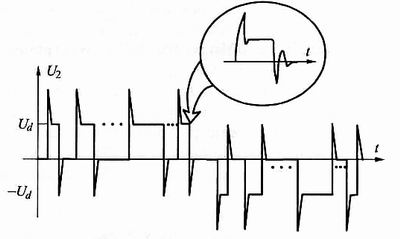 рис.31
рис.31
Напряжение на зажимах АД при подключении длинным кабелем.
В этом случае согласно теории цепей кабель следует рассматривать как однородную длинную линию с распределенными параметрами. Ввиду относительной малости последовательным активным сопротивлением rК и параллельной активной проводимостью gK участка линии можно пренебречь. Волновое сопротивление z0 кабеля при этом определяется последовательной индуктивностью LK и параллельной емкостью СК участка линии:
![]()
Значения параметров LK и СК зависят от типа, конструкции и сечения кабеля (кабельной линии), но, как свидетельствуют справочные и экспериментальные данные, зависимость эта не значительна. Для широкого ассортимента монтажных проводов и кабелей усредненные значения этих параметров составляют:
LK = 1 мкГн/м;
СK = 50 пФ/м.
При этом z0 ≈140 Ом.
Можно с большой степенью достоверности принять z0=100...200 Ом для всех применяемых в электроприводах монтажных проводов и кабелей.
Входное сопротивление z1 кабеля представлено выходным сопротивлением полупроводниковых вентилей и внутренним сопротивлением батареи конденсаторов входного фильтра и является относительно малой величиной, которой также можно пренебречь:z1<<z0
Выходным сопротивлением z2 кабеля является относительно большое для высокочастотного сигнала входное сопротивление АД, определяемое индуктивностью рассеяния L его обмоток и эквивалентной частотой ωf, фронта импульса напряжения:
![]()
поэтому z1<<z0.
Ориентировочный
расчет z2
для АД на напряжение 0,4 кВ в диапазоне
мощностей от 10 до 400 кВт при
![]() = 0,1 мкс дает следующие результаты:
= 0,1 мкс дает следующие результаты:
для АД мощностью 10 кВт z2 = 30 кОм,
для АД мощностью 400 кВт z2 = 800 Ом.
В связи с вышесказанным, при прохождении крутого фронта импульса напряжения входная часть силового монтажного кабеля электропривода (со стороны АИН) работает в режиме короткого замыкания, выходная часть кабеля (на зажимах АД) - в режиме холостого хода. С учетом значений параметров волновые характеристики монтажных проводов и кабелей приближаются к характеристикам линии без искажений и потерь:
![]()
Равна примерно половине скорости света в вакууме. Для приведенных выше параметров LK и Cк
vf = 142*106 м/с.
Этой скорости соответствует длина волны
М![]()
Время Тf прохождения фронта импульса от выхода АИН к зажимам АД определяется длиной кабеля l.
Тf = l/Vf Если это время больше или равно времени фронта tf то в конце кабеля из-за его несогласованности с нагрузкой (z2>>z0) возникает отраженная волна напряжения n2 U1, которая суммируется с падающей (прямой) волной напряжения U1, образуя стоячие волны.
В результате на зажимах АД образуется напряжение
![]()
где 0< n2 ≤1 - коэффициент отражения.
![]()
Максимальное значение и напряжение на зажимах АД удваивается.
Возвращаясь к началу кабеля, отраженная волна гасится малым входным сопротивлением z1<<z0. Поэтому напряжение U1 на зажимах АИН не изменяется.
При Tf<tf , коэффициент отражения n2 рассчитывается по формуле:
![]()
Таким образом, от
длины волны зависит критическая
длина
![]() кабеля. Кабель, длина которого соизмерима
с длиной волны, считается "длинным
кабелем".
кабеля. Кабель, длина которого соизмерима
с длиной волны, считается "длинным
кабелем".
Критической
считается длина кабеля, равная половине
длины волны:
![]() ,
при которой к обмоткам АД прикладываются
импульсы напряжения, близкие к
двойному напряжению U.
,
при которой к обмоткам АД прикладываются
импульсы напряжения, близкие к
двойному напряжению U.
В электроприводах класса напряжения 0,4 кВ перенапряжение может достигать 1000 В. С учетом характеристик используемых IGBT в зависимости от мощности электропривода, типа электродвигателя и кабеля может составлять от 7 до 20 м.
Высокочастотные импульсные перенапряжения в сочетании с высокой крутизной фронта импульсов напряжения могут приводить к интенсивному старению и снижению срока службы изоляции обмоток двигателя.
Для ограничения волновых перенапряжений на зажимах АД используются специальные фильтры, включаемые в выходные цепи инвертора:
1) последовательный силовой синусный LC-фильтр для преобразования прямоугольно-импульсного напряжения инвертора в синусоидальное напряжение на зажимах двигателя;
2) последовательный силовой LRC-фильтр dU/dt для уменьшения крутизны фронта импульсов выходного напряжения инвертора;
3) параллельный (слаботочный) RС-фильтр ограничения перенапряжений непосредственно у зажимов двигателя (обеспечивает согласование волнового сопротивления кабеля).
4) использование ферритовых колец. Одно ферритовое кольцо может быть использовано для каждой выходной фазы или для всех фаз вместе. В первом случае уменьшаются симметричные гармоники, но есть вероятность, что ферритовые кольца перенасытятся и потеряют свою функциональную способность. В случае, когда одно ферритовое кольцо на все три фазы, перенасыщение не грозит, поскольку сумма токов равна 0, и феррит может быть загружен только несимметричными гармониками. Лучшее решение, это комбинация этих двух вариантов.