

16. Блок-схема следящего привода.
Состоит из следующих основных элементов: задающего устройства ЗУ, которым формируется сигнал управления, пропорциональный требуемому перемещению исполнительного механизма (датчики, реагирующие на изменение условий работы или параметров технологического процесса); сравнивающего устройства СУ, или датчика рассогласования, устанавливающего соответствие сигнала воспроизведения, поступающего от исполнительного механизма, сигналу управления; усилителя У, которым производится усиление мощности сигнала управления за счет внешнего источника энергии ВИЭ; исполнительного механизма ИМ, которым перемещается объект управления и воспроизводится программа, определяемая задающим устройством; обратная связь ОС, которой исполнительных механизм соединен со сравнивающим устройством или с усилителем. Обратная связь является отличительным элементом следящего привода.
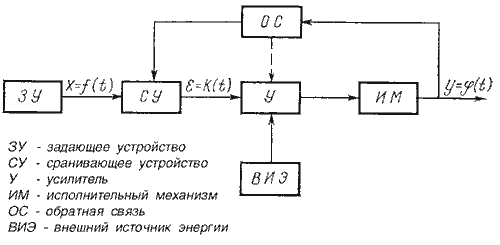
Рис.1. Блок-схема следящего привода
Величина x = f (t) (перемещение или скорость), сообщаемая задающим устройством сравнивающему устройству, называется "входом", а y = φ (t)(перемещение или скорость), воспроизведенная исполнительным механизмом, - "выходом". Разность (x - y) = ε называется ошибкой слежения или рассогласования системы.
17. Схема управления асинхронным двигателем с короткозамкнутым ротором, нереверcивная.
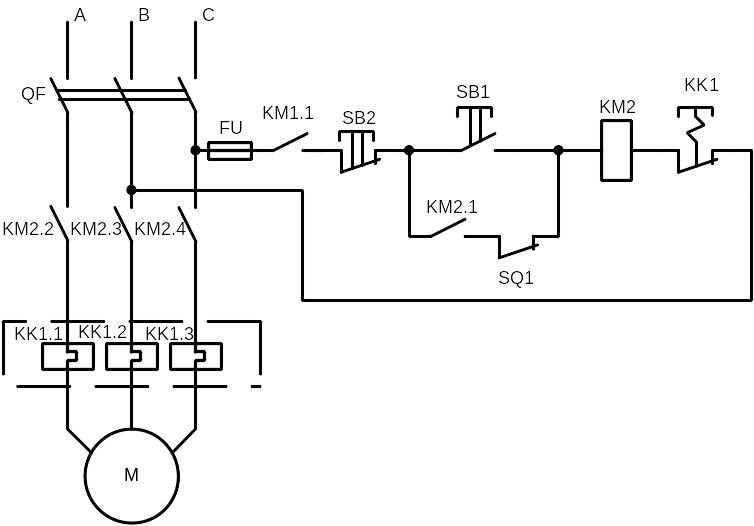
Наиболее просто автоматизация осуществляется для АД с короткозамкнутым ротором, т.к. управление пуском здесь сводится в большинстве случаев к прямому включению двигателя на полное включение напряжения сети.
18. Основная характеристика следящего привода.
Основная характеристика следящего привода. Следящий электропривод структурно отличается от регулируемого привода наличием контура ОС по перемещению. Скорость ЭД в таком приводе пропорциональна рассогласованию. В связи с этим, его называют приводом с пропорциональным управлением. Основной характеристикой следящего привода является ошибка положения между заданным и реальным углами: ε=φз-φ. (в идеальном случае ε=0) это ошибка углового положения вала ЭД.
ИЭ – измерительный элемент; ФД – фазовый детектор; У – усилитель; Д – ЭД; Р – понижающий редуктор; КЦ – корректирующая цепь; Н -нагрузка.
Вх. сигнал Θвх поступает на ИЭ, где из него вычитается вых. сигнал Θвых. На выходе ИЭ появляется Uδ пропорциональное ошибке. Это U подается на вход ФД, а вых. сигнал с AL подается на вход У. У обеспечивает U необходимое для питания двигателя, кот вращает через редуктор выходную ось нагрузки. В ЭП имеется 2 ОС. Главная жесткая ООС по углу связывает вых. ось Р и ИЭ. Сигнал корректирующей гибкой ООС по Uдвигателя подается на ФД.
19. Схемы пуска двигателя постоянного тока в функции тока, времени, угловой скорости.
1) Запуск ДПТ в функции угловой скорости: Угловая скорость двигателя часто фиксируется косвенным путем, т.е. измерением параметров связанных с угловой скоростью. Для LGN таким параметром является ЭДС двигателя. Фрагмент схемы пуска ДПТ независимого возбуждения в функции ЭДС имеет вид:
Схема
пуска
В начальный момент пуска напряжение на катушках контакторов в момент ускорения равно падению U в цепи якоря, т.к. е=KwФ=0. По мере увеличения w эл. двигателя его ЭДС возрастает. При определенной угловой скорости w1 срабатывает контактор КУ1 и т.д. при определенных скоростях w2, w3. U срабатывания на разных катушках будут равны: Uку1=Сw1+I(R2+R3+Rя), Uку2=Сw2+I(R3+Rя), Uку3=Сw3+IRя. Эти напряжения мало отличаются друг от друга. Катушки реле м.б. выбраны на одинаковое напряжение, действующее в функции ЭДС и включающие затем контакторы. Эти схемы встречаются в приводах небольшой мощности, станках.
2) управление ДПТ в функции тока
Схема автоматического пуска должна предусматривать одно или несколько реле, включенных непосредственно в цепь якоря. Кол-во реле зависит от числа пусковых ступеней резисторов.
Ток во время пуска колеблется в некоторых заданных пределах, но по мере увеличения угловой скорости ток снижается. При включении сети через контакты КЛ включается катушка токового реле (РТ) и его размыкающий контакт РТ в цепи контактов угловое ускорение КУ в начале пуска размыкается. М пускается с плавностью введенным R. Контакты блокировочного реле РБ не позволяют контакту КУ включится сразу после вкл. контактора КЛ питающей цепи. Т.к. время вкл. реле РБ выбирают больше или равным времени вкл. РТ.
3) управление ДПТ в функции времени
П риведенные
пусковые диаграммы w=f(t)
и I=f(t)
показывают, что шунтирование ступеней
пускового резистора должно происходить
через определенные промежутки времени.
Первая ступень резистора должна быть
введена ч/з время t1
после начала пуска, 2 – ч/з t2.
Этим и определяется создание схем
управления работающих в функции времени.
Используют различные реле времени, кот
настраиваются на определенные выдержки
времени. По принципу действия делятся:
электронные, механические, э/м, а также
полупроводниковые, пневматические и
т.д. Реле управляют контакторами углового
ускорения по истечению выдержки времени,
независимо от того, какой ток проходит
ч/з двигатель и до какой скорости он
разогнался.
риведенные
пусковые диаграммы w=f(t)
и I=f(t)
показывают, что шунтирование ступеней
пускового резистора должно происходить
через определенные промежутки времени.
Первая ступень резистора должна быть
введена ч/з время t1
после начала пуска, 2 – ч/з t2.
Этим и определяется создание схем
управления работающих в функции времени.
Используют различные реле времени, кот
настраиваются на определенные выдержки
времени. По принципу действия делятся:
электронные, механические, э/м, а также
полупроводниковые, пневматические и
т.д. Реле управляют контакторами углового
ускорения по истечению выдержки времени,
независимо от того, какой ток проходит
ч/з двигатель и до какой скорости он
разогнался.