

Индуктивные, магнитострикционные датчики, дифференциальные и трансформаторные датчики, принцип действия, недостатки и преимущества.
Индуктивные датчики входят в класс электромагнитных преобразователей и являются параметрическими датчиками. Эти датчики выполняют преобразование измеряемой величины в изменение индуктивности за счет изменения параметров магнитной цепи катушки индуктивности.
Индуктивность катушки,
намотанной медным проводом и содержащей
w
витков, в общем случае равна
![]() ,
где
,
где
![]() - комплексное магнитное сопротивление
цепи, по которой замыкается магнитное
поле катушки,
- комплексное магнитное сопротивление
цепи, по которой замыкается магнитное
поле катушки,
![]() - компонента магнитного сопротивления,
вызванная рассеянием магнитного поля,
а также потерями в стали на гистерезис
и вихревые токи. Магнитные цепи большинства
индуктивных датчиков устроены таким
образом, чтобы эти потери были минимальны.
- компонента магнитного сопротивления,
вызванная рассеянием магнитного поля,
а также потерями в стали на гистерезис
и вихревые токи. Магнитные цепи большинства
индуктивных датчиков устроены таким
образом, чтобы эти потери были минимальны.
В результате начальная
индуктивность реальных индуктивных
датчиков с воздушными зазорами, площадь
которых одинакова и равна S,
а суммарная длина воздушного зазора
равна d,
выражается приближенной формулой
![]() .
Из этой формулы видно, что на значение
индуктивности катушки влияют только
такие измеряемые величины, которые
могут быть преобразованы в изменение
площади S
или величины зазора d,
или, иными словами, в изменение магнитного
сопротивления магнитной цепи датчика.
.
Из этой формулы видно, что на значение
индуктивности катушки влияют только
такие измеряемые величины, которые
могут быть преобразованы в изменение
площади S
или величины зазора d,
или, иными словами, в изменение магнитного
сопротивления магнитной цепи датчика.
В большинстве индуктивных датчиков используется зависимость индуктивности от изменяемой величины зазора, либо от изменения магнитного сопротивления всей цепи в целом за счет перемещения сердечника внутри катушки вдоль ее оси.
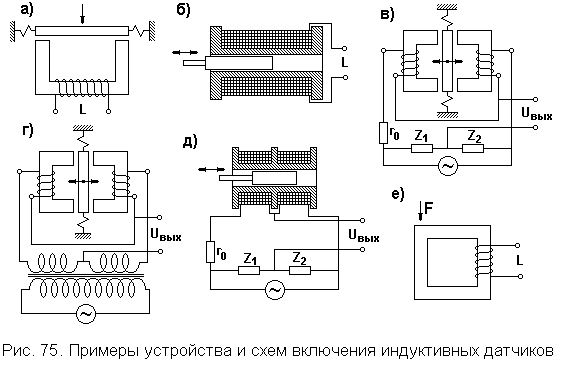
а), б) Два одиночных индуктивных датчика. Обоим этим датчикам свойственен серьезный недостаток, из-за которого датчики такой конструкции не имеют практического применения. В них на перемещаемую деталь действует значительная электромагнитная сила, зависящая от положения этой детали (якоря).
в), г), д) Влияние электромагнитной силы существенно снижается у дифференциальных индуктивных датчиков. Приведенные схемы включения могут быть применены к любому из индуктивных датчиков независимо от его конструкции.
Эти схемы представляют собой неравновесные мосты, позволяющие получать на выходе нулевой сигнал при нулевом значении измеряемой величины. При этом значении мосты должны быть уравновешены по двум составляющим, поскольку это мосты переменного тока.
Первичные преобразования измеряемых величин в изменение длины зазора аналогичны тем, которые выполняются в тензорезистивных и емкостных датчиках. Преобразование силы в малое перемещение выполняется с помощью подходящего упругого элемента с точно известной жесткостью W. Преобразование ускорения в силу происходит путем использования силы инерции, действующей на тело с точно известной массой m. Это тело крепится на перемещаемую часть упругого элемента датчика. Для преобразования давления в силу, а затем - в перемещение используется мембрана с точно известной площадью, жестко связанная с перемещаемым элементом.
Существенным достоинством индуктивных датчиков, которое оправдывает их промышленное применение, является значительная мощность выходного сигнала, которая существенно превышает мощность выходных сигналов емкостного, пьезоэлектрического и тензорезистивного датчиков.
Другой разновидностью
индуктивных датчиков является датчик,
магнитная цепь которого выполнена из
сплошного магнитомягкого материала
без воздушных зазоров. Индуктивность
датчика равна
![]() ,
где l
- средняя длина магнитопровода.
,
где l
- средняя длина магнитопровода.
Индуктивность такого датчика может изменяться путем изменения относительной магнитной проницаемости магнитопровода. Индуктивные датчики с таким магнитопроводом называются магнитоупругими.
Магнитоупругие датчики
применяются для измерения силы в пределах
от 250
Н до
![]() Н. Погрешность магнитоупругих датчиков
зависит от многих факторов: механический
гистерезис, нелинейность значения
магнитной индукции в магнитопроводе,
старение, нестабильность напряжения
питания и др. В целом после механической
тренировки магнитострикционного датчика
с монолитным магнитопроводом может
быть достигнута погрешность 2%.
Н. Погрешность магнитоупругих датчиков
зависит от многих факторов: механический
гистерезис, нелинейность значения
магнитной индукции в магнитопроводе,
старение, нестабильность напряжения
питания и др. В целом после механической
тренировки магнитострикционного датчика
с монолитным магнитопроводом может
быть достигнута погрешность 2%.
Достоинствами магнитоупругого датчика является значительная мощность, развиваемая на выходе и его высокая надежность, поскольку он не содержит движущихся элементов.
45