

Тема 6. Движение твердого тела вокруг неподвижной точки. (сферическое движение)
Д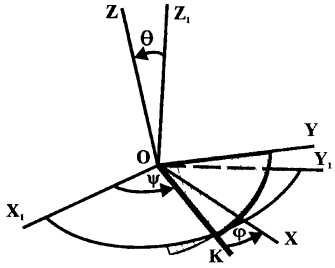 вижение
твердого тела, имеющего неподвижную
точку, называют
вращением твердого тела вокруг неподвижной
точки. Это движение
также называют сферическим, поскольку
траекториями
всех точек тела являются сферы, центр
которых находится в
неподвижной точке. Для задания движения
твердого тела, имеющего
одну неподвижную точку,
используют углы Эйлера (рис. 1).
вижение
твердого тела, имеющего неподвижную
точку, называют
вращением твердого тела вокруг неподвижной
точки. Это движение
также называют сферическим, поскольку
траекториями
всех точек тела являются сферы, центр
которых находится в
неподвижной точке. Для задания движения
твердого тела, имеющего
одну неподвижную точку,
используют углы Эйлера (рис. 1).
Т
Рисунок 1![]() — неподвижная
система координат;
— неподвижная
система координат;
![]() — подвижная
система координат,
связанная с твердым
телом;
— подвижная
система координат,
связанная с твердым
телом;
![]() — линия узлов (линия
пересечения неподвижной плоскости
— линия узлов (линия
пересечения неподвижной плоскости
![]() и
подвижной
и
подвижной
![]() );
);
![]() — угол процессии (угол между осью
— угол процессии (угол между осью
![]() и линией узлов);
и линией узлов);
![]() — угол собственного вращения (угол
между линией узлов и
подвижной осью ОХ);
— угол собственного вращения (угол
между линией узлов и
подвижной осью ОХ);
![]() — угол нутации (угол между неподвижной
осью
— угол нутации (угол между неподвижной
осью
![]() и подвижной
осью
и подвижной
осью
![]() ).
Все углы откладываются
в направлении против хода часовой
стрелки от осей
,
и линии узлов
.
).
Все углы откладываются
в направлении против хода часовой
стрелки от осей
,
и линии узлов
.
Положение тела в любой момент времени определяется углами Эйлера (прецессии, собственного вращения и нутации), которые должны быть однозначными функциями времени:
-

уравнения или закон вращения твердого тела
вокруг неподвижной точки.
(1)
Угловая скорость
П
Рисунок 2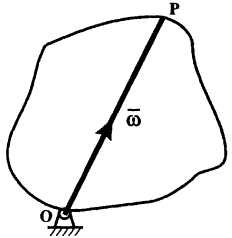
![]() ,
проходящей через эту
точку (рис. 2). Ось
будет мгновенной осью
вращения, на которой
все точки имеют скорость, равную
нулю. Вектор угловой скорости будет
направлен по мгновенной оси вращения
в сторону, откуда виден поворот тела
против хода часовой стрелки. Модуль
вектора угловой скорости равен:
,
проходящей через эту
точку (рис. 2). Ось
будет мгновенной осью
вращения, на которой
все точки имеют скорость, равную
нулю. Вектор угловой скорости будет
направлен по мгновенной оси вращения
в сторону, откуда виден поворот тела
против хода часовой стрелки. Модуль
вектора угловой скорости равен:
![]() (2)
(2)
Вектор угловой скорости в отличие от вращательного движения вокруг неподвижной оси может изменяться по величине и направлению.
Угловое ускорение
Угловое ускорение — производная вектора угловой скорости по времени:
![]() .
(3)
.
(3)
В
Рисунок 3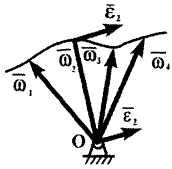
Скорость точки
Скорости точек твердого тела
в сферическом движении определяют по
формуле Эйлера (рис. 4):
![]() (4)
(4)
г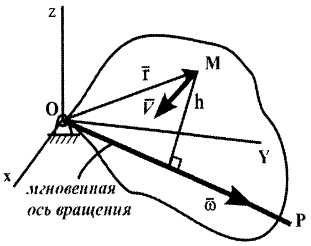 де
де
![]() —
вектор угловой скорости;
— радиус-вектор данной точки
относительно неподвижной точки. Модуль
скорости равен:
—
вектор угловой скорости;
— радиус-вектор данной точки
относительно неподвижной точки. Модуль
скорости равен:
![]() (5)
(5)
г
Рисунок 4![]() — кратчайшее расстояние точки до
мгновенной оси вращения.
— кратчайшее расстояние точки до
мгновенной оси вращения.
Направление
вектора скорости
![]() определяется
направлением векторного
произведения
определяется
направлением векторного
произведения
![]() ,
т. е.
вектор скорости
будет
направлен
перпендикулярно плоскости
векторов
и
,
откуда
поворот вектора
к вектору
виден
на наименьший угол против
хода часовой стрелки (рис.
4).
,
т. е.
вектор скорости
будет
направлен
перпендикулярно плоскости
векторов
и
,
откуда
поворот вектора
к вектору
виден
на наименьший угол против
хода часовой стрелки (рис.
4).
Ускорение точки
Д ифференцируем
формулу (4) по времени
ифференцируем
формулу (4) по времени
![]() (6),
(6),
г
Рисунок 5![]() — ускорение точки;
— ускорение точки;
![]() — угловое ускорение
тела;
— угловое ускорение
тела;
![]() — скорость точки. Тогда
— скорость точки. Тогда
![]() (7)
(7)
Слагаемое
![]() представляет
собой вектор вращательного
ускорения точки, величина которого
равна:
представляет
собой вектор вращательного
ускорения точки, величина которого
равна:
![]() ,
где
,
где
![]() — расстояние
от точки до вектора
.
Вектор
— расстояние
от точки до вектора
.
Вектор
![]() направлен
в соответствии с
направлением векторного
произведения
направлен
в соответствии с
направлением векторного
произведения
![]() (рис.
5)
(рис.
5)
Слагаемое
![]() — вектор
осестремительного ускорения, который
направлен в соответствии
с векторным произведением, т. е. по
направлению перпендикуляра
,
опущенного из точки на мгновенную ось
вращения. Величина осестремительного
ускорения равна:
— вектор
осестремительного ускорения, который
направлен в соответствии
с векторным произведением, т. е. по
направлению перпендикуляра
,
опущенного из точки на мгновенную ось
вращения. Величина осестремительного
ускорения равна:
![]() (8)
(8)
Ускорение точки в сферическом движении равно геометрической сумме вращательного и осестремительного ускорений:
![]() (9)
(9)
Так как вращательное и осестремительное ускорения не перпендикулярны друг другу, то величина ускорения точки равна:
![]() .
(10)
.
(10)