

2 Синтез кулачкового механизма
2.1 Анализ закона движения толкателя
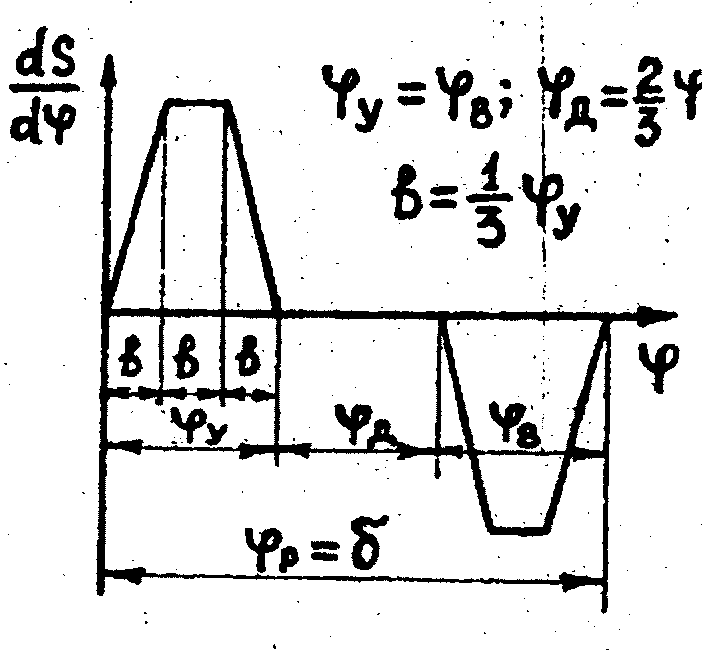
Рисунок 9 – Закон изменения аналога скорости толкателя
Полный цикл работы кулачкового механизма в общем случае состоит из четырех фаз:
- фаз удаления толкателя, соответствующая углу поворота кулачка на угол φу;
- фаза дальнего выстоя, соответствующая углу поворота кулачка на угол φд (φд = (2/3) φу);
- фаза возвращения толкателя, соответствующая углу поворота кулачка на угол φв (φв = φу);
- фаза ближнего стояния, соответствующая углу поворота кулачка на угол φб = 360о - (φу + φд + φв);
Сумма фазовых углов поворота кулачка равна одному полному его обороту, т.е. φу + φд + φв + φб = 2π, а рабочий угол поворота - сумме углов удаления, дальнего выстоя и возвращения
(2.1)![]()
Где
![]() -
фаза удаления,
-
фаза удаления,
![]() -
фаза дальнего стояния,
-
фаза дальнего стояния,
![]() -
фаза возвращения,
-
фаза возвращения,
δ- рабочий угол поворота.
Для нашего примера имеем:
![]()
откуда
![]()
2.2 Определение закона движения толкателя
В начале строим
заданную диаграмму аналога скорости
(dS/dφ)
- φ.
С этой целью в масштабе μφ
(из расчета 1о
в мм чертежа) по оси абсцисс откладываем
фазовые углы
![]()
М
![]()
Максимальную ординату графика, которая соответствует максимальной скорости толкателя, принять равной 60 мм. Разбивку по оси φ проведем из условия, что углы φу и φв делятся каждый на 6 частей, деление угла φд не производим, так как в его пределе толкатель не перемещается.
Диаграмму перемещений толкателя S = S(φ) строим как интегральную кривую функции dS/dφ = dS/dφ (φ).
Интегрирование проводим в следующем порядке:
- построим на графике dS/dφ пунктиром ординаты, соответствующие серединам интервалов 0-1,1-2,..., и снесем их вершины на ось ординат (точки 1', 2' и т.д.);
-
H =57 мм;
- из точки О системы координат S - φ проводим отрезок 01" параллельно лучу Р1', отрезок 1"2" параллельно лучу Р2" и т. д.
Полученная ломаная линия (в пределе кривая) и представляет собой диаграмму S = S(φ).
Определяем масштабы:
-
(2.2)
![]()
где Yмах = 28 мм - замеренное максимальное значение ординаты S,
![]() -
ход толкателя.
-
ход толкателя.
![]() мм/мм
мм/мм
- масштаб оси ординат диаграммы аналога скорости dS/dφ = dS/dφ(φ)
(2.3)![]()
![]()
2.3 Динамический синтез кулачкового механизма
Задачей динамического синтеза является определение такого минимального радиуса вектора центрового профиля кулачка rо, при котором переменный угол давления α ни в одном положении кулачкового механизма не будет превышать αмах.
Примем следующий порядок определения rо:
- взяв произвольную точку Во, распложенную на линии абсциссы φ диаграммы S(φ), откладываем от нее вертикально отрезок, который равен ходу hв толкателя. Этот отрезок размечаем в соответствии с диаграммой S(φ). сохраняя масштаб μs = 1.25 мм/мм;
- через полученные точки Во, В1, В2, ... и т. д. проводим перпендикуляры к линиям перемещения толкателя, на которых откладываем влево при подъеме и вправо при опускании толкателя отрезки у1 (1-1, 2-2,..., и т. д.), которые представляют собой аналоги скоростей, взятые из графика dS/d φ (φ).
Обязательным условием является то, что они должны откладываться в том же масштабе, что и перемещение толкателя S, т. е. μφ dS/dφ = μs. Концы этих отрезков соединяем плавной кривой и получаем диаграмму S - dS/dφ.
К полученной кривой слева и справа под углом αмах = 25° к направлению движения толкателя проводим касательные. Заштрихованная область и есть область выбора центра вращения кулачка.
П
(2.4)
е"![]()
![]()
(2.5)
![]()
![]()
2.4 Профилирование кулачка
Построение профиля кулачка проводим в следующей последовательности:
- с центром в точке О проводим окружности rо и е в выбранном масштабе μL =1.55 мм/мм;
- к окружности радиуса е проводим вертикальную касательную, являющуюся линией перемещения толкателя. Точка Во пересечения этой линии с окружностью радиуса rо определяет нижнее положение толкателя;
-от линии ОВо в направлении обратном ωк, откладываем фазовые углы φу, φд, φв, φб, которые делим на части в соответствии с диаграммой S(φ). Углы стояния толкателя φд и φв делить не нужно, так как кулачок в пределах этих углов, очерчивается дугами окружностей;
- через полученные точки 1, 2, 3,... проводим лучи, касательные к окружности радиуса е, которые представляют собой линии движения толкателя, соответствующие углам поворота кулачка;
- вдоль этих лучей от окружности радиуса rо откладываем перемещения толкателя, взятые с диаграммы S(φ) (отрезки 1-1", 2-2'',...). Через полученные точки Во, 1'', 2'' и т. д. проводим плавную кривую, представляющую собой центровой профиль кулачка;
-
(2.6)
rр ≤ 0.4ro
где
![]() -
радиус ролика
-
радиус ролика
- примем rp = 46 мм, что на чертеже в ранее принятом масштабе μL = =1.56 мм/мм будет равно
(2.7)![]()
Где
![]() -радиус
ролика на чертеже.
-радиус
ролика на чертеже.
![]()
- строим действительный профиль кулачка, для этого проводим ряд дуг окружностей радиуса rр внутри центрового профиля с центрами на этом профиле. Огибающая этих дуг и есть действительный профиль кулачка.
Заключение
Я ознакомился со структурным исследованием механизма и изучил основы кинематического и кинетостатического исследования кривошипно-ползунного механизма для чего построил кривошипно-ползунный механизм на листе формата А1 c углом рабочего профиля кулачка 120 градусов и ходом толкателя 35 мм, а также планы скоростей, ускорений, сил и статистических моментов с последующим вычислением их величин во всех двенадцати положениях кривошипа. По результатам вычислений мною были построены диаграммы скоростей, ускорений, движущих моментов.
Также я ознакомился с типами плоских кулачковых механизмов и овладел методами анализа их кинематики и динамики, основами синтеза механизма и профилирования кулачка. Для чего построил диаграммы перемещения по заданной диаграмме аналога скорости и определил минимальный радиус-вектор центрового профиля кулачка. Затем по фазам удаления, вращения толкателя и т.д. я построил на листе формата А1 сам профиль кулачка с роликом в определенном масштабе.
Список используемых источников
1. Анализ и синтез механизмов: Методические указания к выполнению курсовой работы.- Краснодар: Изд-во КубГТУ, 2001.-43с.
2. Прикладная механика/ Иосилевич, Строганов, Маслов.- М.: Высшая школа, 1989.-576с.