

5. Снятие основных характеристик преобразователя.
Для снятия зависимостей активных и реальных сопротивлений преобразователя от положения якоря предусмотрена схема, приведённая на Рисунке 4
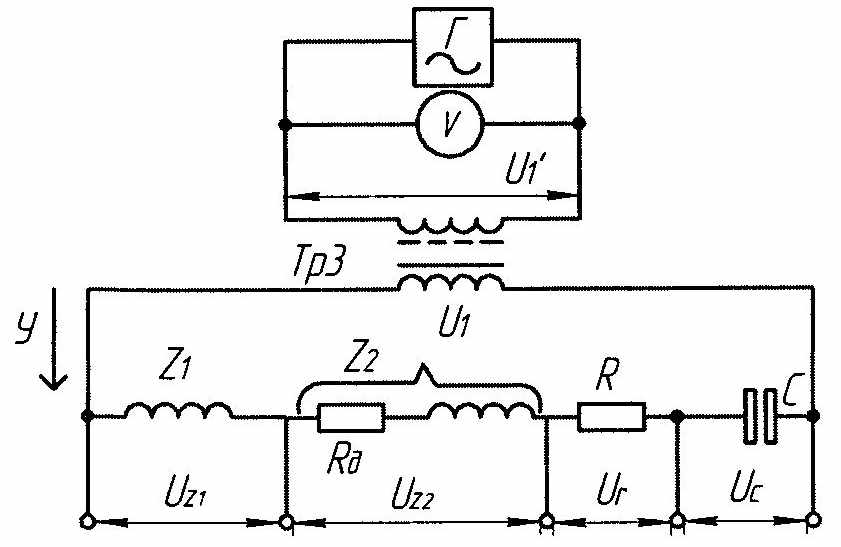
Рисунок 4
Здесь Z1, Z2. – сопротивлении обмоток преобразователя,
R – известное активное сопротивление,
С – известная емкость.
Подключив входные зажимы фазочувствительного измерителя к зажимам
конденсатора, регулирует фазу управляющего напряжения Ůy,так, чтобы показания были рулевыми. При этом вектор Uy измерителя совпадает по фазе с током IA
Потом присоединяют зажимы измерителя к зажимам сопротивления R и отмечают его показания Аr .Затем присоединяют измеритель к зажимам Z1 – отмечают отклонение al к зажимам Z2 – отмечают отклонение а2. Так как при всех измерениях вектор управляющего напряжения измерителя совпадает с направлением вектора тока, показания измерителя будут пропорциональны составляющим напряжений, совпадающим по фазе с этим током, т.е активным составляющим напряжений.
Поэтому aR = K*IA*R (2)
![]() (3)
(3)
Здесь К – коэффициент пропорциональности;
Z1 Z2 – полное сопротивление обмоток;
ф1ф2 – аргументы (сдвиги фаз) сопротивлений Z1 Z2
Из (2) и (3) следует:
![]()
![]()
![]() (4)
(4)
Для определения индуктивных сопротивлений обмоток нужно отрегулировать фазу управляющего напряжения так, чтобы нулевое показание индикатора имело место, когда подключен к сопротивлению R. Оттуда вектор управляющего напряжения Uy будет перпендикулярна вектору тока IA, и показания измерителя будут пропорциональны составляющим напряжения, ортогональным току IA
Присоединяя измеритель к зажимам Z1 и Z2 и обозначая его отклонение В1 и В2 получим:
![]() (5)
(5)
Разделив эти выражения на aR = К * IА * R получим:
![]()
![]() .
.
Так как магнитная цепь преобразователя нелинейная, то при всех измерениях необходимо поддерживать напряжение на зажимах, преобразователя постоянным и равным.
6. Работа преобразователя в мостовой схеме с фазочувствительным измерителем.
При работе индуктивного дифференциального преобразователя изменения комплексных сопротивлений обмоток наиболее часто измеряются посредством включения обмоток преобразователя в цепь неравновесного четырех плечного моста. Схема моста позволяет реализовать несколько различных вариантов включения преобразователя. Как правило, обмотки дифференциального преобразователя включается в смежные плечи моста.
В работе исследуется мост, в два другие плеча которого включены активные сопротивления R1=R2 (Рисунок 5) питание моста осуществляется от генератор ЗГ через трансформатор Тр З.
Рассмотрим более подробно работу моста с дифференциальным индуктивным преобразователем. Допустим, что в его исходном состоянии, когда мост, уравновешен, параметры обоих обмоток одинаковы и равны Z0 = r0+jwL0.
При смещения якоря на ∆δ параметры обмоток изменяются в разные стороны и становятся равными Z1 = Z0-∆Z1; Z2 = Z0+∆Z2. В первом приближении при относительно малых перемещениях (по отношению к δ0) можно считать, что Z1=∆Z2 = ∆r + j∆X (в действительности приращения не совсем одинаковы). В режиме холостого хода моста при смещения якоря на величину ∆δ на его выходных зажимах появится напряжение, равное
 ,
,
откуда:
![]() (7)
(7)
Обозначим ∆Z = ∆Z * e jφ∆ и Z0 = Z0 * e jφ0
Где; ∆Z = Z0 – модули комплексов ∆Z; Z0
φ∆; φ0 – их аргументы.
Подставляя в 7 получим:
![]() (8)
(8)
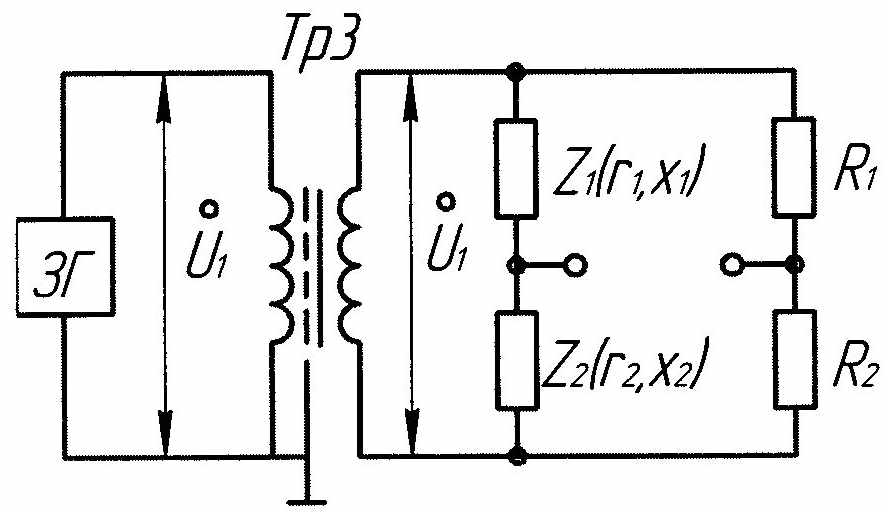
Рисунок 5
Из (8) видно, что модуль напряжения U2
пропорционален модулю изменения полного
сопротивления обмотки, а по фазе он
опережает вектор питающего напряжения
![]() на угол λ = ф∆ - ф0.
Так как в общем случае при изменении ∆δ
при решении ∆Z не пропорционально ∆Х,
то при перемещении якоря угол λ не
остаётся постоянным. Однако, у индуктивного
преобразователя, использованного в
работе, это изменение мало. При изменении
U2 электронным вольтметром с
большим входным по сравнению с выходным
сопротивлением моста его показания
будут пропорциональны ∆Z (при постоянном
напряжении питания). Вольтметр не будет
учитывать направление перемещения
якоря.
на угол λ = ф∆ - ф0.
Так как в общем случае при изменении ∆δ
при решении ∆Z не пропорционально ∆Х,
то при перемещении якоря угол λ не
остаётся постоянным. Однако, у индуктивного
преобразователя, использованного в
работе, это изменение мало. При изменении
U2 электронным вольтметром с
большим входным по сравнению с выходным
сопротивлением моста его показания
будут пропорциональны ∆Z (при постоянном
напряжении питания). Вольтметр не будет
учитывать направление перемещения
якоря.
Если же измерение
![]() производится фазочувствительным
измерителем, то его показания будут
зависеть не только от значения ∆Z, но и
от угла ф – сдвига фаз между напряжений
и
управляющим напряжением фаз о
чувствительного измерителя
производится фазочувствительным
измерителем, то его показания будут
зависеть не только от значения ∆Z, но и
от угла ф – сдвига фаз между напряжений
и
управляющим напряжением фаз о
чувствительного измерителя
![]() .
Максимального отключения указателя
измерителя при заданной расстройте
моста можно добиться отрегулировав
фазу напряжения
так, чтобы она совпадала с фазой напряжения
изменение
направления перемещения якоря вызывает
изменение знака отклонения указателя
фазочувствительного измерителя.
.
Максимального отключения указателя
измерителя при заданной расстройте
моста можно добиться отрегулировав
фазу напряжения
так, чтобы она совпадала с фазой напряжения
изменение
направления перемещения якоря вызывает
изменение знака отклонения указателя
фазочувствительного измерителя.
А теперь остановимся на явлениях, которые при рассмотрении работы преобразователя в мостовой схеме в первом приближении мы не учитывали.
Во-первых, нелинейность сопротивления обмоток Z1 и Z2 Нелинейность Z1 и Z2 приводит к тому, что при питании моста чисто синусоидальным напряжением выходное напряжение содержит высшее нечётные гармоники. В случае применения нефазочувствительного измерителя они создают нелинейность характеристики U2 = f(∆δ) и некоторое остаточное напряжение при ∆δ = 0.
Во-вторых, не идентичность половин сдвоенного преобразователя. Это приводит к тому, что даже по основной гармонике мост нельзя уравновесить перемещением якоря. Это иллюстрируется векторной диаграммой Рисунок6, построенной в предложении, что при X1=X2 и R1=R2 имеет место состояние r1 > r2
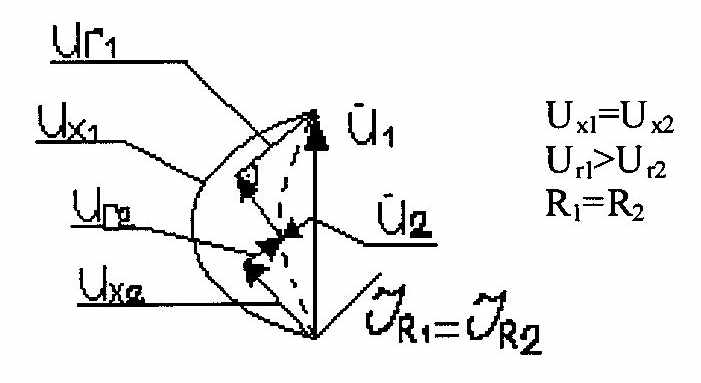
Рисунок 6
Пунктирной линией показа годограф
вектора основной гармоники напряжения
при перемещении якоря. При больших
значениях ∆δ вектор
почти
совпадает по направлению с вектором
напряжения
![]() (например, при +∆δ) или же сдвинут по
отношению к нему почти на 180 (при -∆δ). С
уменьшением ∆δ и прохождением точки
(например, при +∆δ) или же сдвинут по
отношению к нему почти на 180 (при -∆δ). С
уменьшением ∆δ и прохождением точки
∆δ = 0 вектор изменяется по величине и совершает поворот, но никогда не достигает нулевого значения. При некотором положении якоря вектор сдвинут по отношению к на 90° и Iср.= 0. Как это следует из формулы (1). Заметим, что асимметрию r1 > r2 при х1 = х2 можно устранить введением дополнительного активного сопротивления RA (Рисунок 4) последовательно c Z2 (так и сделано в лабораторной установке).